一种垃圾焚烧电厂的巡检预警方法及系统与流程
本技术涉及自动控制,更具体的说,是涉及一种垃圾焚烧电厂的巡检预警方法及系统。
背景技术:
1、随着社会对环保的重视,垃圾焚烧发电作为一种有效的能源利用手段得以广泛应用。在垃圾焚烧电厂的运行中,对锅炉间和烟气间等关键区域设备状态的监控和故障预警至关重要。
2、当前,垃圾电厂的巡检模式主要依赖人工结合辅助仪器。工作人员需步行前往现场各巡检点,通过扫码填报上传或手工抄表纸质记录的方式进行数据收集,包括就地表计读取抄录、异音异响判断和现场异常状况识别等。
3、然而,这种传统巡检方式存在诸多问题。由于巡检区域场地狭小、环境复杂、表计众多、声音嘈杂且数据量大,人工巡检只能依据线上点检表或经验记录重要数据,易忽略非必要数据。并且,人工巡检周期长,数据记录不准确,故障预警不及时,难以满足电厂高效、安全、稳定运行的需求。
4、在垃圾焚烧发电领域,目前尚未有成熟的智能巡检技术方案。已有巡检技术巡检不精确,在安全生产的预警方面不全面。同时,目前巡检技术的应用场景较为狭窄,通常仅针对某一个平台或车间的巡检目标,无法实现对整个垃圾焚烧发电厂,特别是锅炉间和烟气间的全面有效巡检。
5、因此,如何实现更大范围地精确巡检,全方位实现精准预警,是需要解决的问题。
技术实现思路
1、鉴于上述问题,本技术提供了一种垃圾焚烧电厂的巡检预警方法及系统,以更大范围地精确巡检,全方位实现精准预警,是需要解决的问题。
2、为了实现上述目的,现提出具体方案如下:
3、一种垃圾焚烧电厂的巡检预警方法,应用于巡检预警系统,所述巡检预警系统包括巡检机器人,所述巡检机器人在所述垃圾焚烧电厂的锅炉间和烟气间之间的l型轨道上行驶;
4、该方法包括:
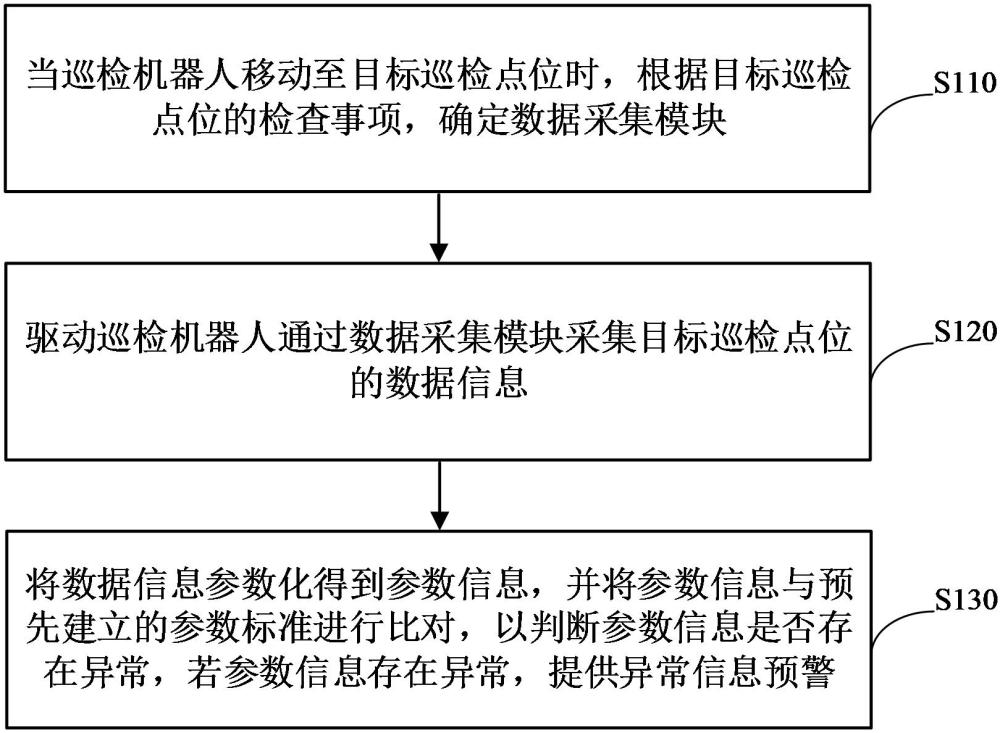
5、当所述巡检机器人移动至目标巡检点位时,根据所述目标巡检点位的检查事项,确定数据采集模块;
6、驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息;
7、将所述数据信息参数化得到参数信息,并将所述参数信息与预先建立的参数标准进行比对,以判断所述参数信息是否存在异常,若所述参数信息存在异常,提供异常信息预警。
8、可选的,所述巡检机器人为360°环视机器人。
9、可选的,所述目标巡检点位包括引风机区域,所述数据采集模块包括拍摄模块、粉尘采集模块、气体传感器模块、噪声采集模块和红外热成像模块;
10、所述驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息,包括:
11、驱动所述巡检机器人通过所述拍摄模块拍摄所述引风机区域的表计读数;
12、驱动所述巡检机器人通过所述粉尘采集模块采集所述引风机区域的粉尘颗粒参数;
13、驱动所述巡检机器人通过所述气体传感器模块采集所述引风机区域的气体成分;
14、驱动所述巡检机器人通过所述噪声采集模块采集所述引风机区域的声谱频率值;
15、驱动所述巡检机器人通过所述红外热成像模块获取所述引风机区域的温度值;
16、组合所述表计读数、所述粉尘颗粒参数、所述气体成分、所述声谱频率值和所述温度值,得到所述引风机区域的数据信息。
17、可选的,所述目标巡检点位包括制浆区域,所述数据采集模块包括拍摄模块;
18、所述驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息,包括:
19、驱动所述巡检机器人通过所述拍摄模块对所述制浆区域的法兰、管道及电机分别进行多次拍摄,得到所述制浆区域的拍摄数据,以作为所述制浆区域的数据信息。
20、可选的,所述目标巡检点位包括焚烧炉区域,所述数据采集模块包括温振传感器和拍摄模块;
21、所述驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息,包括:
22、驱动所述巡检机器人通过所述温振传感器采集所述焚烧炉区域的温振数据,所述焚烧炉区域的温振数据包括推料器冷却风机的温度数据及振动数据,以及二次风机的温度数据及振动数据;
23、驱动所述巡检机器人通过所述拍摄模块拍摄所述焚烧炉区域的电磁阀设备油压数码管表计,得到油压数码管表计拍摄数据;
24、组合所述温振数据和所述油压数码管表计拍摄数据,得到所述焚烧炉区域的数据信息。
25、可选的,所述目标巡检点位包括0米空预器区域,所述数据采集模块包括拍摄模块;
26、所述驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息,包括:
27、驱动所述巡检机器人通过所述拍摄模块对所述0米空预器区域的底部管道阀门、底部管道端部及前方管道阀门进行拍摄,得到所述0米空预器区域的拍摄数据,以作为所述0米空预器区域的数据信息。
28、可选的,所述目标巡检点位包括45米集汽集箱区域,所述数据采集模块包括拍摄模块;
29、所述驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息,包括:
30、驱动所述巡检机器人通过所述拍摄模块分别对所述45米集汽集箱区域的本体压力表、取样管变送器压力表及管道阀门进行拍摄,得到所述45米集汽集箱区域的拍摄数据,以作为所述0米空预器区域的数据信息。
31、可选的,所述目标巡检点位包括42米汽包区域,所述数据采集模块包括拍摄模块;
32、所述驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息,包括:
33、驱动所述巡检机器人通过所述拍摄模块分别对所述42米汽包区域的本体压力表读数、取样管变送器压力表及汽包本体管道进行拍摄,得到所述42米汽包区域的拍摄数据,以作为所述42米汽包区域的数据信息。
34、可选的,所述参数标准的建立过程,包括:
35、获取所述锅炉间和所述烟气间之间的每个巡检点位的每项指标的多期巡检数据;
36、针对每个巡检点位的每项指标,根据所述巡检点位的所述指标的多期巡检数据,确定所述巡检点位的所述指标的正常值区间;
37、基于各个巡检点位的各项指标的正常值区间,构建参数标准。
38、一种垃圾焚烧电厂的巡检预警系统,所述巡检预警系统包括巡检机器人,所述巡检机器人在所述垃圾焚烧电厂的锅炉间和烟气间之间的l型轨道上行驶;
39、该系统包括终端设备层、网络传输层和后台应用层;
40、所述终端设备层,用于当所述巡检机器人移动至目标巡检点位时,根据所述目标巡检点位的检查事项,确定数据采集模块;驱动所述巡检机器人通过所述数据采集模块采集所述目标巡检点位的数据信息;
41、所述网络传输层,用于将所述数据信息传输至所述后台应用层;
42、所述后台应用层,用于将所述数据信息参数化得到参数信息,并将所述参数信息与预先建立的参数标准进行比对,以判断所述参数信息是否存在异常,若所述参数信息存在异常,提供异常信息预警。
43、可选的,所述目标巡检点位包括引风机区域,所述数据采集模块包括拍摄模块、粉尘采集模块、气体传感器模块、噪声采集模块和红外热成像模块;
44、所述终端设备层,包括:
45、第一拍摄单元,用于驱动所述巡检机器人通过所述拍摄模块拍摄所述引风机区域的表计读数;
46、粉尘采集单元,用于驱动所述巡检机器人通过所述粉尘采集模块采集所述引风机区域的粉尘颗粒参数;
47、气体成分采集单元,用于驱动所述巡检机器人通过所述气体传感器模块采集所述引风机区域的气体成分;
48、噪声采集单元,用于驱动所述巡检机器人通过所述噪声采集模块采集所述引风机区域的声谱频率值;
49、红外热成像单元,用于驱动所述巡检机器人通过所述红外热成像模块获取所述引风机区域的温度值;
50、引风机区域数据获取单元,用于组合所述表计读数、所述粉尘颗粒参数、所述气体成分、所述声谱频率值和所述温度值,得到所述引风机区域的数据信息。
51、可选的,所述目标巡检点位包括制浆区域,所述数据采集模块包括拍摄模块;
52、所述终端设备层,包括:
53、第二拍摄单元,用于驱动所述巡检机器人通过所述拍摄模块对所述制浆区域的法兰、管道及电机分别进行多次拍摄,得到所述制浆区域的拍摄数据,以作为所述制浆区域的数据信息。
54、可选的,所述目标巡检点位包括焚烧炉区域,所述数据采集模块包括温振传感器和拍摄模块;
55、所述终端设备层,包括:
56、温振数据采集单元,用于驱动所述巡检机器人通过所述温振传感器采集所述焚烧炉区域的温振数据,所述焚烧炉区域的温振数据包括推料器冷却风机的温度数据及振动数据,以及二次风机的温度数据及振动数据;
57、第三拍摄单元,用于驱动所述巡检机器人通过所述拍摄模块拍摄所述焚烧炉区域的电磁阀设备油压数码管表计,得到油压数码管表计拍摄数据;
58、焚烧炉区域数据获取单元,用于组合所述温振数据和所述油压数码管表计拍摄数据,得到所述焚烧炉区域的数据信息。
59、可选的,所述目标巡检点位包括0米空预器区域,所述数据采集模块包括拍摄模块;
60、所述终端设备层,包括:
61、第四拍摄单元,用于驱动所述巡检机器人通过所述拍摄模块对所述0米空预器区域的底部管道阀门、底部管道端部及前方管道阀门进行拍摄,得到所述0米空预器区域的拍摄数据,以作为所述0米空预器区域的数据信息。
62、可选的,所述目标巡检点位包括45米集汽集箱区域,所述数据采集模块包括拍摄模块;
63、所述终端设备层,包括:
64、第五拍摄单元,用于驱动所述巡检机器人通过所述拍摄模块分别对所述45米集汽集箱区域的本体压力表、取样管变送器压力表及管道阀门进行拍摄,得到所述45米集汽集箱区域的拍摄数据,以作为所述0米空预器区域的数据信息。
65、可选的,所述目标巡检点位包括42米汽包区域,所述数据采集模块包括拍摄模块;
66、所述终端设备层,包括:
67、第六拍摄单元,用于驱动所述巡检机器人通过所述拍摄模块分别对所述42米汽包区域的本体压力表读数、取样管变送器压力表及汽包本体管道进行拍摄,得到所述42米汽包区域的拍摄数据,以作为所述42米汽包区域的数据信息。
68、可选的,该系统还包括:
69、巡检数据获取单元,用于获取所述锅炉间和所述烟气间之间的每个巡检点位的每项指标的多期巡检数据;
70、正常值区间确定单元,用于针对每个巡检点位的每项指标,根据所述巡检点位的所述指标的多期巡检数据,确定所述巡检点位的所述指标的正常值区间;
71、参数标准构建单元,用于基于各个巡检点位的各项指标的正常值区间,构建参数标准。
72、借由上述技术方案,本技术通过巡检机器人在垃圾焚烧电厂的锅炉间和烟气间之间的l型轨道上巡检,当巡检机器人移动至目标巡检点位时,根据目标巡检点位的检查事项,确定数据采集模块,驱动巡检机器人通过数据采集模块采集目标巡检点位的数据信息,将数据信息参数化得到参数信息,并将参数信息与预先建立的参数标准进行比对,以判断参数信息是否存在异常,若参数信息存在异常,提供异常信息预警。由此可见,巡检机器人能在锅炉间和烟气间之间穿梭巡检,并能够根据针对巡检点位不同开展检查事项,实现大范围且精确巡检,而且将采集数据与预先建立的参数标准比对,以此判定是否异常,从而达到全方位精准预警。
- 还没有人留言评论。精彩留言会获得点赞!