一种水下无人航行器的应急辅助控制方法、系统及产品与流程
本发明涉及水下无人航行器运动控制,尤其涉及一种水下无人航行器的应急辅助控制方法、系统及产品。
背景技术:
1、由于风浪、海啸等自然环境的湍流混合作用,在海洋上层会形成一层温度、密度和盐度都较为均匀的水层,称之为上混合层,在混合层的下面,通常还存在着一层温度、盐度与密度均会随深度增大而大幅变化的水层,称之为密度跃层。密度跃层由于外界扰动而产生的波动现象称为内波,内波作为一种特殊的海洋环境现象,对于海洋水声通讯、探测等海上活动,特别是对航行器的航行状态及其航行安全均有着至关重要的影响。大型水下无人航行器在航行时,容易受到水流和水体密度变化的影响,导致航行器产生不均衡量,若航行器不均衡量超出升降舵承载能力,则无法通过控制舵角的方式使航行器深度稳定,从而导致深度失控等危险状况的发生。
技术实现思路
1、本发明旨在解决水下无人航行器发生深度失控的危险状况的问题。为此,本发明提供一种水下无人航行器的应急辅助控制方法、系统及产品,利用卷积神经网络,预测航行器的未来状态,然后基于预测数据计算航行器升降舵承载能力并结合其他预测状态对航行器航行安全性进行判定,提前采取应急辅助控制措施消除航行器不均衡量,避免航行器在航行过程中出现失控风险,提升了大型水下无人航行器的航行安全性。
2、本发明提供一种水下无人航行器的应急辅助控制方法,采用的技术方案如下:包括:
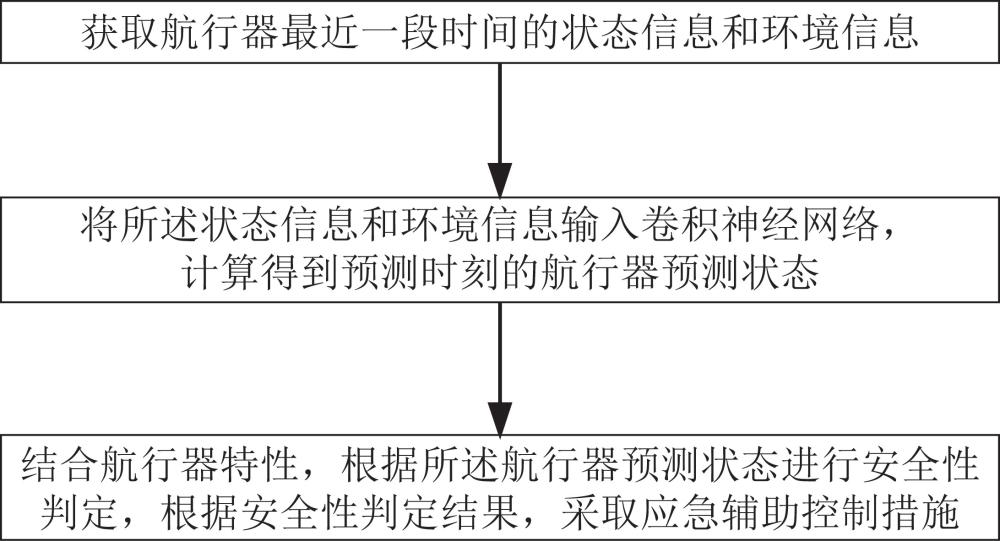
3、获取航行器最近一段时间的状态信息和环境信息;
4、将所述状态信息和环境信息输入卷积神经网络,计算得到预测时刻的航行器预测状态;
5、结合航行器特性,根据所述航行器预测状态进行安全性判定,根据安全性判定结果,采取应急辅助控制措施。
6、进一步的,所述状态信息包括轴向速度、横向速度、垂向速度、横倾力矩、纵倾力矩、转艏力矩、横倾角、纵倾角、航向角、纵向位移、横向位移、垂向位移、方向舵舵角、升降舵舵角和航速,
7、所述环境信息包括水流流向、水流流速和水体密度,
8、所述航行器预测状态包括预测时刻的垂向速度、预测时刻的深度、预测时刻的航速和预测时刻的浮力不均衡量。
9、进一步的,所述最近一段时间包括当前采样时刻,以及当前采样时刻之前的多个采样时刻。
10、进一步的,结合航行器特性,根据所述航行器预测状态进行安全性判定,根据安全性判定结果,采取应急辅助控制措施的过程为:
11、计算预测时刻的升降舵的最大承载能力:
12、
13、其中,表示预测时刻的升降舵的最大承载力;表示计算系数,与航行器外形有关;表示航行器最大升降舵舵角;表示预测时刻的航速;
14、若且且,或者且且,则将航行器安全性状态判定为危险,否则判定为安全,
15、其中,表示预测时刻的浮力不均衡量;表示预测时刻的深度;表示预测时刻的垂向速度;表示航行器允许的最大航行深度,表示航行器允许的最小航行深度;
16、若航行器安全性状态为危险,且预测时刻的浮力不均衡量为正值,则对航行器水舱进行注水;
17、若航行器安全性状态为危险,且预测时刻的浮力不均衡量为负值,则对航行器水舱进行排水;
18、若航行器安全性状态为安全,则不对航行器水舱进行操作。
19、进一步的,为10,为,为100米,为10米。
20、进一步的,所述卷积神经网络包括依次连接的3个卷积层和1个全连接层。
21、进一步的,所述3个卷积层分别为第一卷积层、第二卷积层和第三卷积层,
22、所述第一卷积层的卷积核为,所述第一卷积层使用prelu激活函数;
23、所述第二卷积层的多尺度卷积核分别为:、和,所述第二卷积层使用maxout激活函数;
24、所述第三卷积层的卷积核为,所述第三卷积层使用prelu激活函数;
25、所述全连接层使用prelu激活函数。
26、进一步的,所述卷积神经网络为预训练过的卷积神经网络,其训练时使用的训练数据集根据航行器的历史状态信息和环境信息制作而成,所述训练数据集的训练样本及训练标签的形式为:
27、训练样本:
28、训练标签:
29、其中,表示第采样时刻的轴向速度;表示第采样时刻的横向速度;表示第采样时刻的垂向速度;表示第采样时刻的横倾力矩;表示第采样时刻的纵倾力矩;表示第采样时刻的转艏力矩;表示第采样时刻的横倾角;表示第采样时刻的纵倾角;表示第采样时刻的航向角;表示第采样时刻的纵向位移;表示第采样时刻的横向位移;表示第采样时刻的垂向位移;表示第采样时刻的方向舵舵角;表示第采样时刻的升降舵舵角;表示第采样时刻的航速;表示第采样时刻的水流流向;表示第采样时刻的水流流速;表示第采样时刻的水体密度;;表示预测时刻的垂向速度的标签值;表示预测时刻的深度的标签值;表示预测时刻的航速的标签值;表示预测时刻的浮力不均衡量的标签值;
30、损失函数为:
31、
32、其中,表示预测时刻的垂向速度;表示预测时刻的深度;表示预测时刻的航速;表示预测时刻的浮力不均衡量;
33、训练时选择随机梯度下降法sgd作为网络优化方法,batch size为32,训练20个周期。
34、本发明还提供一种水下无人航行器的应急辅助控制系统,采用的技术方案如下:包括:依次连接的数据采集模块、预测状态计算模块和安全性模块,
35、所述数据采集模块,用于获取航行器最近一段时间的状态信息和环境信息;
36、所述预测状态计算模块,用于将所述状态信息和环境信息输入卷积神经网络,计算得到预测时刻的航行器预测状态;
37、所述安全性模块,用于结合航行器特性,根据所述航行器预测状态进行安全性判定,根据安全性判定结果,采取应急辅助控制措施。
38、本发明还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的一种水下无人航行器的应急辅助控制方法。
39、本发明实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
40、1.本发明利用卷积神经网络,预测航行器的未来状态,然后基于预测数据计算航行器升降舵承载能力并结合其他预测状态对航行器航行安全性进行判定,提前采取应急辅助控制措施消除航行器不均衡量,避免航行器在航行过程中出现失控风险,提升了大型水下无人航行器的航行安全性。
41、2.本发明在预测中融入了环境信息,具有更高的预测准确度;安全性判定方法结合了升降舵承载力和航行器预测状态,以及航行器特性,具有更高的可信度;通过安全性判定结果对航行器不均衡量进行消除,提升了航行器的航行安全性。
42、3.本发明建立的卷积神经网络,从航行器的历史航行数据和环境数据中自动学习出航行器状态变化,对航行器未来的状态进行预测,可以准确的预测出航行器的垂向速度、深度、航速和浮力不均衡量,为准确进行航行器安全性判定提供支持。
43、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!