针对新能源车的部件信息控制装置与方法与流程
本发明属于新能源车的部件信息,具体涉及一种针对新能源车的部件信息控制装置与方法。
背景技术:
1、新能源车是指采用非常规的车用燃料作为动力来源(或者使用常规的车用燃料、采用新型车载动力装置),综合车辆的动力控制和驱动方面的先进技术,形成的技术原理先进、具有新技术、新结构的汽车。
2、针对新能源车,目前往往要运用如专利公开号为“cn210623058u”的现有技术方案的新能源车用电动空压机性能检测控制技术,其包括同plc相连的显示屏和压力传感器,压力传感器用于采集同新能源车的电动空压机的出气口相通的出气管道中的压力值其传至plc,plc用于存放其收取的同新能源车的电动空压机的出气口相通的出气管道中的压力值且把该压力值传至显示屏上显示,以此达成对新能源车用电动空压机的性能检测控制。
3、伴着技术的进步,目前对电动空压机超规情形的确定关键是经由定义压力超规值,认定新能源车的电动空压机形况超规;然而此类认定方式常常会产生即时性不足或者错判的情形。
技术实现思路
1、为解决现有技术中带有的缺陷,本发明提出一种针对新能源车的部件信息控制装置与方法,依据各个压力值拟合线上各个雷同子空间对超规几率的作用因子,取得多个目的雷同子空间;把首次压力值拟合线上的雷同子空间定义成基准雷同子空间;构建各个基准雷同子空间相应的目的雷同子空间簇;依据各个基准雷同子空间相应的目的雷同子空间簇内目的雷同子空间对超规几率的作用因子和时距,取得最末1个压力值拟合线上各个目的雷同子空间的电动空压机未位于高负荷运转情形的几率;依据最末1个压力值拟合线上各个目的雷同子空间电动空压机未位于高负荷运转情形的几率、对超规几率的作用因子和目的雷同子空间的数目,取得现时新能源车的电动空压机运行产生超规的几率值,能精准确定现时新能源车的电动空压机是不是产生超规,改善了采集出气管道中的压力来认定电动空压机超规的高效性与精准度。
2、本发明运用如下的技术方案。
3、一种针对新能源车的部件信息控制方法,包括:
4、压力传感器采集同新能源车的电动空压机的出气口相通的出气管道中的压力值其传至plc,plc存放其收取的同新能源车的电动空压机的出气口相通的出气管道中的压力值且把该压力值传至显示屏上显示;
5、plc收取同新能源车的电动空压机的出气口相通的出气管道中的压力值后,还包括:
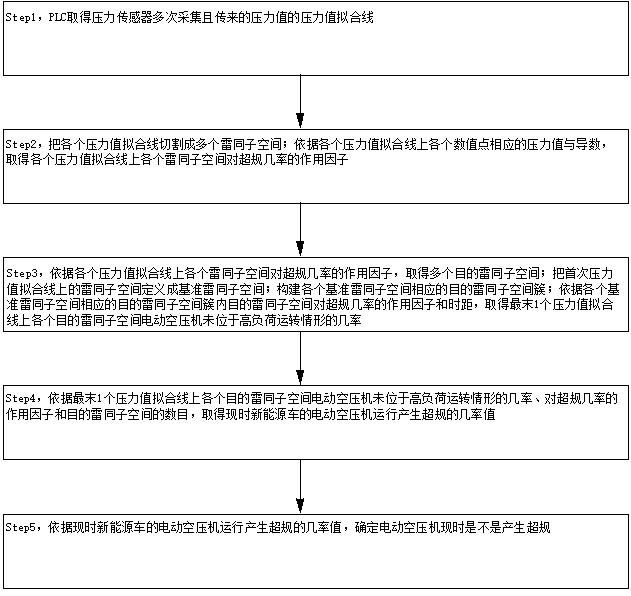
6、step1,plc取得压力传感器多次采集且传来的压力值的压力值拟合线;
7、step2,把各个压力值拟合线切割成多个雷同子空间;依据各个压力值拟合线上各个数值点相应的压力值与导数,取得各个压力值拟合线上各个雷同子空间对超规几率的作用因子;
8、step3,依据各个压力值拟合线上各个雷同子空间对超规几率的作用因子,取得多个目的雷同子空间;把首次压力值拟合线上的雷同子空间定义成基准雷同子空间;构建各个基准雷同子空间相应的目的雷同子空间簇;依据各个基准雷同子空间相应的目的雷同子空间簇内目的雷同子空间对超规几率的作用因子和时距,取得最末1个压力值拟合线上各个目的雷同子空间电动空压机未位于高负荷运转情形的几率;
9、step4,依据最末1个压力值拟合线上各个目的雷同子空间电动空压机未位于高负荷运转情形的几率、对超规几率的作用因子和目的雷同子空间的数目,取得现时新能源车的电动空压机运行产生超规的几率值;
10、step5,依据现时新能源车的电动空压机运行产生超规的几率值,确定电动空压机现时是不是产生超规。
11、进一步地,在step1中,运用压力传感器对同新能源车的电动空压机的出气口相通的出气管道中的压力值执行采集,各距1s采集1次压力值,依据在定义的各个定时周期采集的压力值在直角坐标系上运用最小二乘法取得多个压力值拟合线,一定时周期采集的压力值形成一个压力值拟合线,压力值拟合线在直角坐标系上的x轴的值是压力值的采集时点,压力值拟合线在直角坐标系上的y轴的值是采集的压力值。
12、进一步地,在step1中,各个定时周期的大小是60min。
13、进一步地,在step2中,运用导数法对各个压力值拟合线执行推算,取得一极大值点的压力值队列,对极大值点的压力值队列执行变动推算,取得一变动量队列,把变动量队列内不低于事先定义的值u的各个数值相应的全体极大值点中的最末一极大值点,定义成切割界点,运用全体切割界点把各个压力值拟合线切割成多个雷同子空间。
14、进一步地,在step2中,对极大值点的压力值队列执行变动推算,取得一变动量队列的方法,包括:
15、极大值点的压力值队列为{b0,b1,b2,........},其内bn是极大值点的压力值队列内的第n个数值,n是不低于零的整数;
16、据此变动量队列内的第n个元素cn=bn+3*(bn+1-bn+2)+bn+3。
17、进一步地,在step2中,第z个压力值拟合线上第j个数值点对超规几率的作用幅值的推算方程是:
18、
19、方程内,rz,j代表第z个压力值拟合线上第j个数值点对超规几率的作用幅值;nz,j代表第z个压力值拟合线上第j个数值点相应的压力值;代表第z个压力值拟合线上全体数值点相应压力值的均数;lz,j代表第z个压力值拟合线上第j个数值点相应的导数;zg(lz)代表第z个压力值拟合线上全体数值点相应导数的最高量。
20、进一步地,在step2中,第z个压力值拟合线上第k个雷同子空间对超规几率的作用因子的推算方程是:
21、
22、方程内,xz,k代表第z个压力值拟合线上第k个雷同子空间对超规几率的作用因子;rz,k,t代表第z个压力值拟合线上第k个雷同子空间内第t个数值点对超规几率的作用幅值;pz,k代表第z个压力值拟合线上第k个雷同子空间内全体数值点的数目;是运用z-score方法对执行标准化操作。
23、进一步地,在step3中,事先定义的临界量t是在第z个压力值拟合线上第k个雷同子空间对超规几率的作用因子高过事先定义的临界量t时,定义成目的雷同子空间;
24、在step3中,把各个压力值拟合线上的最先时点至各个目的雷同子空间当中的一数值点的时点的时距,定义成各个目的雷同子空间的位点参量;
25、在全体次压力值拟合线中,把首次压力值拟合线上的目的雷同子空间定义成基准雷同子空间,总计各个基准雷同子空间分别同各个非首次压力值拟合线内的全体目的雷同子空间的位点参量相减而得的量的模数的最低量相应的目的雷同子空间,定义成关键雷同子空间,把各个基准雷同子空间和全体关键雷同子空间形成各个基准雷同子空间相应的目的雷同子空间簇;
26、把各个关键雷同子空间中最先时点和最末时点间形成的时距大小,定义成各个关键雷同子空间的延续时段大小;
27、第q个基准雷同子空间相应的目的雷同子空间簇是电动空压机各个定时周期的高负荷运转时段的几率值的推算方程是:
28、
29、方程内,fq代表第q个基准雷同子空间相应的目的雷同子空间簇是电动空压机各个定时周期的高负荷运转时段的几率值;εu代表第q个基准雷同子空间相应的目的雷同子空间簇内全体关键雷同子空间的延续时段大小的标准差;uq,i代表第q个基准雷同子空间相应的目的雷同子空间簇内第i个关键雷同子空间和第q个基准雷同子空间最先时点的时距;pq,l代表第q个基准雷同子空间相应的目的雷同子空间簇中全体关键雷同子空间的数目;xq,l代表第q个基准雷同子空间相应的目的雷同子空间簇内第l个目的雷同子空间对超规几率的作用因子;代表第q个基准雷同子空间相应的目的雷同子空间簇内全体目的雷同子空间对超规几率的作用因子的均数;pq,i代表第q个基准雷同子空间相应的目的雷同子空间簇内全体目的雷同子空间的数目;为运用z-score方法对执行标准化操作。
30、进一步地,在step3中,把最末1个压力值拟合线上第b个目的雷同子空间所处目的雷同子空间簇相应的基准雷同子空间,定义成主基准雷同子空间;
31、而在最末1个压力值拟合线上目的雷同子空间不位于目的雷同子空间簇中,就不执行解析;
32、最末1个压力值拟合线上第b个目的雷同子空间电动空压机未位于高负荷运转情形的几率的推算方程是:
33、
34、方程内,qb代表最末1个压力值拟合线上第b个目的雷同子空间电动空压机未位于高负荷运转情形的几率;xb代表最末1个压力值拟合线上第b个目的雷同子空间对超规几率的作用因子;f代表主基准雷同子空间相应的目的雷同子空间簇是电动空压机各个定时周期的高负荷运转时段的几率值;f'代表主基准雷同子空间相应的目的雷同子空间刷新簇是电动空压机各个定时周期的高负荷运转时段的几率值。
35、进一步地,在step4中,现时新能源车的电动空压机运行产生超规的几率值的推算方程是:
36、
37、方程内,s代表现时新能源车的电动空压机运行产生超规的几率值;xl是最末1个压力值拟合线上第l个目的雷同子空间对超规几率的作用因子;zg{x}代表最末1个压力值拟合线上全体目的雷同子空间对超规几率的作用因子内的最高量;l代表最末1个压力值拟合线上全体目的雷同子空间的数目;p代表全体采集的频次;pl,l+1′代表第l个减去第l+1个压力值拟合线上目的雷同子空间数目而得的量的模数;代表全体毗邻的2个压力值拟合线上目的雷同子空间数目相减而得的量的模数的均数;ql代表最末1个压力值拟合线上第l个目的雷同子空间电动空压机未位于高负荷运转情形的几率;
38、为运用z-score方法对执行标准化操作。
39、进一步地,在step5中,如果现时新能源车的电动空压机运行产生超规的几率值高过事先定义的值u,就确定电动空压机现时产生超规;在电动空压机产生超规时,plc就对显示屏传出超规消息来显示。
40、一种针对新能源车的部件信息控制装置,包括:
41、同plc相连的显示屏和压力传感器,压力传感器用于采集同新能源车的电动空压机的出气口相通的出气管道中的压力值其传至plc,plc用于存放其收取的同新能源车的电动空压机的出气口相通的出气管道中的压力值且把该压力值传至显示屏上显示;
42、运行在plc上的模块包括:
43、拟合模块,其用于plc取得压力传感器多次采集且传来的压力值的压力值拟合线;
44、作用模块,其用于把各个压力值拟合线切割成多个雷同子空间;依据各个压力值拟合线上各个数值点相应的压力值与导数,取得各个压力值拟合线上各个雷同子空间对超规几率的作用因子;
45、构建模块,其用于依据各个压力值拟合线上各个雷同子空间对超规几率的作用因子,取得多个目的雷同子空间;把首次压力值拟合线上的雷同子空间定义成基准雷同子空间;构建各个基准雷同子空间相应的目的雷同子空间簇;依据各个基准雷同子空间相应的目的雷同子空间簇内目的雷同子空间对超规几率的作用因子和时距,取得最末1个压力值拟合线上各个目的雷同子空间电动空压机未位于高负荷运转情形的几率;
46、超规模块,其用于依据最末1个压力值拟合线上各个目的雷同子空间电动空压机未位于高负荷运转情形的几率、对超规几率的作用因子和目的雷同子空间的数目,取得现时新能源车的电动空压机运行产生超规的几率值;
47、确定模块,其用于依据现时新能源车的电动空压机运行产生超规的几率值,确定电动空压机现时是不是产生超规。
48、本发明的有益效果在于,与现有技术相比,本发明的技术效果包括:
49、经由对出气管道中的压力的采集对电动空压机在运行期间的超规情形执行智能化解析,省时省力,且使得电动空压机的超规情形能高效的被查出,依据各个压力值拟合线上各个雷同子空间对超规几率的作用因子,取得多个目的雷同子空间;把首次压力值拟合线上的雷同子空间定义成基准雷同子空间;构建各个基准雷同子空间相应的目的雷同子空间簇;依据各个基准雷同子空间相应的目的雷同子空间簇内目的雷同子空间对超规几率的作用因子和时距,取得最末1个压力值拟合线上各个目的雷同子空间的电动空压机未位于高负荷运转情形的几率;依据最末1个压力值拟合线上各个目的雷同子空间电动空压机未位于高负荷运转情形的几率、对超规几率的作用因子和目的雷同子空间的数目,取得现时新能源车的电动空压机运行产生超规的几率值,能精准确定现时新能源车的电动空压机是不是产生超规,改善了采集出气管道中的压力来认定电动空压机超规的高效性与精准度。
- 还没有人留言评论。精彩留言会获得点赞!