基于无人机的风力发电机巡检方法、装置及无人机与流程
本技术涉及无人机,具体而言,涉及一种基于无人机的风力发电机巡检方法、装置及无人机。
背景技术:
1、风力发电机巡检是确保风力发电系统正常运行和延长设备寿命的重要环节,现有技术中可以采用高空巡检,例如利用无人机搭载传感器,即高清摄像头、红外热成像等来检测风力发电机的各个部分进行缺陷和故障点分析,但由于风机在运行过程中,会随着风向动态调整叶片的朝向,这样,无人机按照预设的航线对风机叶片进行拍照,无法采集到清晰、角度合适的照片,无法及时了解到风机发电机的运行状态,这样,就需要人为的调整航线的角度,巡检效率不高。因此,如何提高无人机的风力发电机巡检效率,是目前急需解决的问题。
技术实现思路
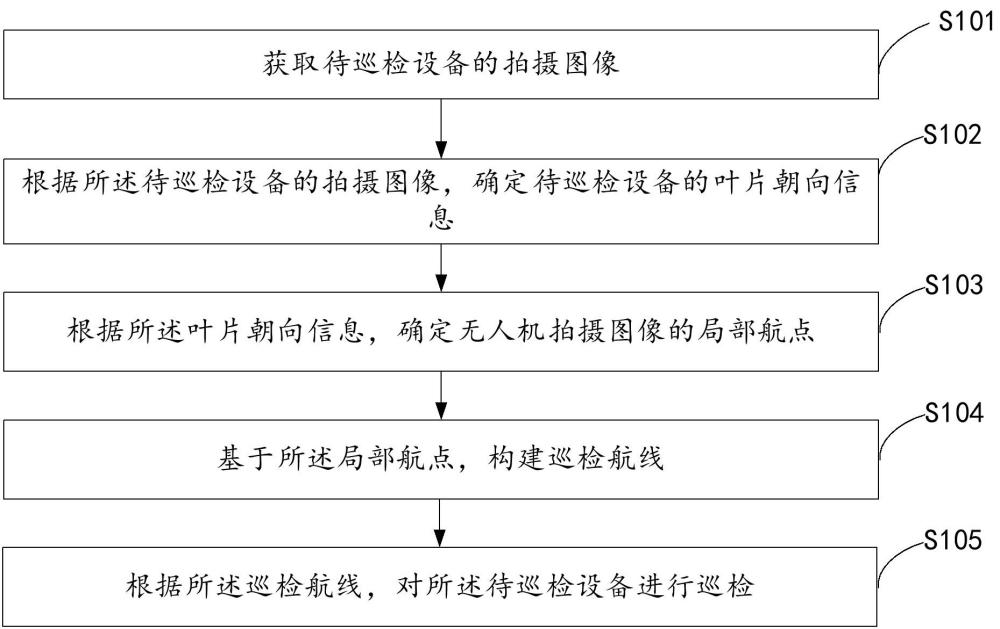
1、本技术提供一种基于无人机的风力发电机巡检方法、装置及无人机,通过本技术的技术方案,通过获取待巡检设备的拍摄图像;根据所述待巡检设备的拍摄图像,确定待巡检设备的叶片朝向信息;根据所述叶片朝向信息,确定无人机拍摄图像的局部航点;基于所述局部航点,构建巡检航线;根据所述巡检航线对所述待巡检设备进行巡检,本技术通过获取叶片朝向信息,进而确定无人机的巡检航线信息,结合通道航线信息和巡检航线信息,对待巡检设备进行拍照,避免人工调整航点位置,提高风力发电机巡检效率。
2、第一方面,本技术提供了一种基于无人机的风力发电机巡检方法,所述方法包括:
3、获取待巡检设备的拍摄图像;
4、根据所述待巡检设备的拍摄图像,确定待巡检设备的叶片朝向信息;
5、根据所述叶片朝向信息,确定无人机拍摄图像的局部航点;
6、基于所述局部航点,构建巡检航线;
7、根据所述巡检航线对所述待巡检设备进行巡检。
8、本技术通过获取叶片朝向信息,进而确定无人机的巡检航线信息,结合通道航线信息和巡检航线信息,对待巡检设备进行拍照,避免人工调整航点位置,提高风力发电机巡检效率。
9、可选地,所述巡检航线基于所述局部航点,构建巡检航线,包括:
10、根据所述叶片朝向信息,确定无人机的拍照位置信息;
11、根据所述无人机的拍照位置信息,确定无人机拍摄图像的局部航点;
12、根据所述无人机拍摄图像的局部航点,确定所述巡检航线。
13、本技术中通过在通道航线的航点上获取待巡检设备的拍摄图像,进而识别出叶片朝向信息,根据该叶片朝向信息,确定无人机的拍照航点信息,控制无人机在拍照航点进行拍照,这样,自动调整无人机的拍照位置,直至可以正面或反面拍摄到满足要求的拍摄图像。
14、可选地,所述根据所述待巡检设备的拍摄图像,确定待巡检设备的叶片朝向信息,包括:
15、采用风机部件识别模型,确定所述拍摄图像中的叶片和机舱;
16、根据所述叶片与所述机舱在所述拍摄图像中的相对位置,确定所述机舱的偏转方向以及所述叶片的第一方向;
17、根据所述机舱的偏转方向或者所述第一方向,确定所述待巡检设备的叶片朝向信息。
18、可选地,所述根据所述叶片朝向信息,确定无人机拍摄图像的局部航点,包括:
19、根据预设移动距离和所述叶片朝向信息,确定无人机拍摄图像的局部航点。
20、本技术中控制无人机从通道航线的航点根据叶片朝向信息进行旋转,并飞行预设移动距离,到达无人机的拍照位置,即局部航点,进而对叶片进行拍照。
21、可选地,所述根据预设移动距离和所述叶片朝向信息,确定无人机拍摄图像的局部航点,包括:
22、根据预设拍摄要求,确定与无人机的局部航点对应的拍照航点信息,其中,所述预设拍摄要求至少包括叶片正面拍摄或叶片背面拍摄中的一种或多种,以及叶片拍摄区域。
23、本技术中在确定拍照位置信息后,可以根据预设拍摄要求,例如需要在叶片正面拍摄或叶片反面拍摄,或者需要拍摄的位置,来确定拍照航点。
24、可选地,所述根据所述巡检航线对所述待巡检设备进行巡检,包括:
25、根据通道航线的当前通道航点,停留在所述待巡检设备上方的预设区域内;
26、根据所述巡检航线,对所述待巡检设备进行拍照;
27、在所述当前通道航点对所述待巡检设备拍照完成后,根据所述通道航线信息,移动到所述通道航线的下一个通道航点,对所述待巡检设备进行拍照。
28、本技术中无人机先飞行至通道航点,然后再根据叶片朝向信息,再飞行至巡检航线信息中的航点,对待巡检设备进行拍照,在拍照完成后,无人机飞行至下一个通道航线的航点,按照上述方式进行巡检,提高巡检效率。
29、可选地,所述方法还包括:
30、对获取到的待巡检设备的照片进行处理,根据处理后的结果,对所述待巡检设备进行故障诊断。
31、本技术中通过获取叶片朝向信息,进而确定无人机的巡检航线信息,结合通道航线信息和巡检航线信息,对待巡检设备进行拍照,对获得的照片进行后续处理,提高图像处理的准确性,同时提高故障诊断的准确性。
32、可选地,所述根据所述巡检航线,对所述待巡检设备进行拍照,包括:
33、根据所述巡检航线,控制无人机移动到第一指定位置,所述第一指定位置用于对叶片的叶尖进行拍摄;
34、控制无人机在所述第一指定位置的垂直线上向下移动到第二指定位置,所述第二指定位置用于对叶片进行拍摄。
35、第二方面,本技术提供了一种基于无人机的风力发电机巡检装置,所述装置包括:
36、获取模块,用于获取待巡检设备的拍摄图像;
37、识别模块,用于根据所述待巡检设备的拍摄图像,确定待巡检设备的叶片朝向信息;
38、确定模块,用于巡检航线根据所述叶片朝向信息,确定无人机拍摄图像的局部航点;
39、生成模块,用于基于所述局部航点,构建巡检航线;
40、巡检模块,用于根据所述巡检航线对所述待巡检设备进行巡检。
41、本技术通过获取叶片朝向信息,进而确定无人机的巡检航线信息,结合通道航线信息和巡检航线信息,对待巡检设备进行拍照,避免人工调整航点位置,提高风力发电机巡检效率。
42、可选地,所述生成模块,用于:
43、根据所述叶片朝向信息,确定无人机的拍照位置信息;
44、根据所述无人机的拍照位置信息,确定无人机拍摄图像的局部航点;
45、根据所述无人机拍摄叶片的局部航点,确定所述巡检航线。
46、本技术中通过在通道航线的航点上获取待巡检设备的拍摄图像,进而识别出叶片朝向信息,根据该叶片朝向信息,确定无人机的拍照航点信息,控制无人机在拍照航点进行拍照,这样,自动调整无人机的拍照位置,直至可以正面或反面拍摄到满足要求的拍摄图像。
47、可选地,所述确定模块,用于:
48、采用风机部件识别模型,确定所述拍摄图像中的叶片和机舱;
49、根据所述叶片与所述机舱在所述拍摄图像中的相对位置,确定所述机舱的偏转方向以及所述叶片的第一方向;
50、根据所述机舱的偏转方向或者所述第一方向,确定所述待巡检设备的叶片朝向信息。
51、可选地,所述确定模块,用于:
52、根据预设移动距离和所述叶片朝向信息,确定无人机拍摄图像的局部航点。
53、本技术中控制无人机从通道航线的航点根据叶片朝向信息进行旋转,并飞行预设移动距离,到达无人机的拍照位置,进而对叶片进行拍照。
54、可选地,所述确定模块,用于:
55、根据预设拍摄要求,确定与无人机的局部航点对应的拍照航点信息,其中,所述预设拍摄要求至少包括叶片正面拍摄或叶片背面拍摄中的一种或多种,以及叶片拍摄区域。
56、本技术中在确定拍照位置信息后,可以根据预设拍摄要求,例如需要在叶片正面拍摄或叶片反面拍摄,或者需要拍摄的位置,来确定拍照航点信息。
57、可选地,所述巡检模块,用于:
58、根据通道航线的当前通道航点,停留在所述待巡检设备上方的预设区域内;
59、巡检航线根据所述巡检航线,对所述待巡检设备进行拍照;
60、在所述当前通道航点对所述待巡检设备拍照完成后,根据所述通道航线信息,移动到所述通道航线的下一个通道航点,对所述待巡检设备进行拍照。
61、本技术中无人机先飞行至通道航点,然后再根据叶片朝向信息,再飞行至巡检航线信息中的航点,对待巡检设备进行拍照,在拍照完成后,无人机飞行至下一个通道航线的航点,按照上述方式进行巡检,提高巡检效率。
62、可选地,所述巡检模块还用于:
63、对获取到的待巡检设备的照片进行处理,根据处理后的结果,对所述待巡检设备进行故障诊断。
64、本技术中通过获取叶片朝向信息,进而确定无人机的巡检航线信息,结合通道航线信息和巡检航线信息,对待巡检设备进行拍照,对获得的照片进行后续处理,提高图像处理的准确性,同时提高故障诊断的准确性。
65、可选地,所述巡检模块,用于:
66、根据所述巡检航线,控制无人机移动到第一指定位置,所述第一指定位置用于对叶片的叶尖进行拍摄;
67、控制无人机在所述第一指定位置的垂直线上向下移动到第二指定位置,所述第二指定位置用于对叶片进行拍摄。
68、第三方面,本技术提供一种无人机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述程序时可实现如第一方面任一实施例所述的基于无人机的风力发电机巡检方法。
- 还没有人留言评论。精彩留言会获得点赞!