控制方法、控制装置、存储介质和电子设备与流程
[0001]
本发明涉及车辆技术领域,尤其涉及一种控制方法、控制装置、存储介质和电子设备。
背景技术:
[0002]
目前,共享单车已成为城市中穿行较多的公共交通工具,用户通过在终端设备安装相关的应用程序即可打开共享单车,极大的方便了人们的出行。
[0003]
为了便于管理,通常需要用户在结束使用车辆时,将车辆停在预定的停车区域。用户通过终端设备发送还车请求后,服务器通过车辆的定位定位系统检测车辆的位置,如果车辆在停车区域内,则进行正常的还车流程。如果车辆不在停车区域内,则需要收取额外的管理费用。由此,可以规范用户用车。
[0004]
但是,现有技术中,由于车辆长时间暴露在外面导致电量不足或定位系统的精度不足等原因,导致用户在还车时车辆定位与实际位置不符,影响正常的单车业务,导致用户不必要的经济损失,影响用户体验。
技术实现要素:
[0005]
有鉴于此,本发明实施例的目的在于提供一种控制方法、控制装置、存储介质和电子设备,可以在定位不准确的情况下,通过相邻车辆进行辅助关锁,减小用户经济损失。
[0006]
第一方面,本发明实施例提供了一种控制方法,所述方法包括:
[0007]
响应于获取到触发信号,获取目标车辆的当前定位点的预定范围内的相邻车辆信息,所述相邻车辆信息包括各车辆的历史订单数据;
[0008]
根据所述历史订单数据获取满足第一条件的车辆数量;
[0009]
响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量;以及
[0010]
响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。第二方面,本发明实施例提供了一种控制装置,所述装置包括:
[0011]
相邻车辆获取单元,用于响应于获取到触发信号,获取目标车辆的当前定位点的预定范围内的相邻车辆信息,所述相邻车辆信息包括各车辆的历史订单数据;
[0012]
第一数量获取单元,用于根据所述历史订单数据获取满足第一条件的车辆数量;
[0013]
第二数量获取单元,用于响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量;以及
[0014]
订单处理单元,用于响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。
[0015]
第三方面,本发明实施例提供了一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现如第一方面所述的方法。
[0016]
第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储计算机程序指令,所述计算机程序指令在被处理器执行时实现如第一方面所述的方法。
[0017]
本发明实施例的技术方案通过在获取到触发信号后,获取目标车辆的当前定位点的预定范围内的相邻车辆信息,根据历史订单数据获取满足第一条件的车辆数量,响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量,响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。由此,可以在定位不准确的情况下,通过相邻车辆进行辅助关锁,减小用户经济损失。
附图说明
[0018]
通过以下参照附图对本发明实施例的描述,本发明的上述以及其它目的、特征和优点将更为清楚,在附图中:
[0019]
图1是本发明实施例的共享车辆系统的示意图;
[0020]
图2是本发明实施例的控制方法的流程图;
[0021]
图3是本发明实施例的车辆定位的示意图;
[0022]
图4是本发明实施例的计算满足第二条件的车辆数量的示意图;
[0023]
图5是本发明实施例的辅助还车的流程图;
[0024]
图6是本发明实施例的运维的流程图;
[0025]
图7是本发明实施例的控制装置的示意图;
[0026]
图8是本发明实施例的电子设备的示意图。
具体实施方式
[0027]
以下基于实施例对本发明进行描述,但是本发明并不仅仅限于这些实施例。在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。为了避免混淆本发明的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
[0028]
此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。
[0029]
除非上下文明确要求,否则在说明书的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
[0030]
在本发明的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0031]
图1是本发明实施例的共享车辆系统的示意图。如图1所示,本发明实施例的共享单车系统包括至少一个服务器1、至少一个车辆和至少一个终端设备。本发明实施例以控制系统包括一个服务器1、三个车辆2a-2c和三个终端设备3a-3c为例进行说明。
[0032]
在本实施例中,服务器1可以是独立的服务器,也可以是服务器集群。
[0033]
进一步地,服务器1为共享车辆平台。
[0034]
在本实施例中,车辆为共享车辆,可以以无线方式与所述服务器1进行通信。
[0035]
进一步地,所述车辆可以是自行车、电动自行车、三轮车和摩托车等。
[0036]
在本实施例中,终端设备为车辆使用者的终端设备。
[0037]
进一步地,所述终端设备可以是手机、平板电脑或者其它专用设备。
[0038]
可选地,用户需要用车时,用户通过应用程序中的扫描功能扫描车辆上的二维码,向车辆发送开锁指令,或者,生成解锁请求并发送至服务器,由服务器接收到终端设备发送的解锁请求后,生成开锁指令并发送至车辆。车辆接收到开锁指令后,开启锁具,使得用户可以使用车辆。用户达到目的地,需要结束使用车辆,通过终端设备的应用程序选择点击还车控件,生成还车请求发送至服务器。服务器接收到还车请求后,获取车辆位置,如果车辆处于停车区域,生成关锁指令发送至车辆,车辆控制锁具关闭,并生成还车成功信号并发送至服务器,以通知服务器车辆归还成功。服务器获取到车辆归还成功的消息后,生成本次使用的账单发送至终端设备。终端设备接收到账单后,用户通过终端设备支付本次费用。由此,通过上述方法即可实现借车、还车和支付的整个流程。
[0039]
进一步地,当用户用车不规范,将车辆停在预定的停车区域外,服务器可以不进行还车流程,或者,在生成本次使用车辆的费用时,收取额外的管理费用。
[0040]
进一步地,当由于定位不准确而无法正常结束使用车辆时,可以通过辅助定位的方式进行还车。
[0041]
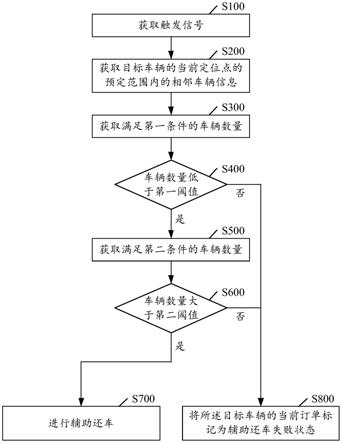
具体地,服务器通过辅助定位的方式进行还车的控制方法可参照图2,包括如下步骤:
[0042]
步骤s100、获取触发信号。
[0043]
在本实施例中,服务器获取辅助定位还车的触发信号。
[0044]
在一个可选的实现方式中,服务器响应于接收到至少一次终端设备发送的还车请求,且还车失败,生成所述触发信号。具体地,服务器可以根据终端设备的发送的还车请求的次数生成所述触发信号。当用户不能进行正常还车时,可以尝试多次点击还车控件,用户每点击一次还车控件生成一次还车请求发送至服务器。预先设置预定阈值,服务器响应于接收到至少一次终端设备发送的还车请求,且还车失败,生成所述触发信号。
[0045]
在另一个可选的实现方式中,接收终端设备发送的触发信号。具体地,在终端设备的应用程序设置辅助还车控件。当用户不能进行正常还车时,点击辅助还车控件,终端设备生产触发信号发送至服务器。
[0046]
步骤s200、获取目标车辆的当前定位点的预定范围内的相邻车辆信息。
[0047]
在本实施例中,所述相邻车辆信息包括各车辆的历史订单数据。
[0048]
可选地,所述预定范围为预定半径的圆。具体地,获取目标车辆的当前定位点,以当前定位点为圆心,以预设的数值为半径获取圆,将定位点在圆内的车辆确定为相邻车辆。
[0049]
进一步地,以图3为例进行说明,其中,每个实线圆圈表示车辆定位点,虚线圆圈表示预定范围。具体地,b1为所述目标车辆的定位点,b21-b26为目标车辆附近的车辆的定位点。有图可知,定位点b21、b22、b23和b24在预定范围内,定位点b25和b26不在预定范围内。因此,定位点b21、b22、b23和b24对应的车辆为目标车辆的当前定位点的预定范围内的相邻车辆。
[0050]
优选地,服务器获取目标车辆预定范围内的高精度定位车辆。具体地,目前已有高精度锁型或者电单车这种高精度经纬度车型投放在城市运营。可利用这些已停在停车点的高精度锁型或车型辅助当前车辆进行停车点定位判定。由此,可以使得辅助定位更加精确。
[0051]
进一步地,车辆的定位点的获取方法可以采用现有的各种技术,例如gps(global positioning system,全球定位系统)定位、wifi(无线上网)定位、基站定位、卫星定位等中的一种或多种组合。
[0052]
进一步地,获取到目标车辆的当前定位点的预定范围内的相邻车辆后,获取相邻车辆信息。
[0053]
进一步地,所述相邻车辆信息包括各车辆的历史订单数据。
[0054]
进一步地,所述历史订单数据为车辆距离当前时间点最近的订单。
[0055]
进一步地,获取到目标车辆的当前定位点的预定范围内的相邻车辆为处于空闲状态的车辆。
[0056]
步骤s300、获取满足第一条件的车辆数量。
[0057]
在本实施例中,服务器获取到触发信号后,获取满足第一条件的车辆数量。
[0058]
进一步地,所述第一条件为所述历史订单数据中距离当前时间点最近的订单为违规停车。
[0059]
进一步地,所述违规停车为当前时间点最近的订单显示车辆停在停车区域外,且被收取额外管理费用的车辆。
[0060]
步骤s400、检测满足第一条件的车辆数量是否低于第一阈值。
[0061]
在本实施例中,获取满足第一条件的车辆数量,检测满足第一条件的车辆数量是否低于第一阈值。
[0062]
优选地,所述第一阈值为1。也即,检测满足第一条件的车辆数量是否为0。
[0063]
应理解,所述第一阈值可以根据实际情况设置为其它值,例如2、3、4
……
。
[0064]
进一步地,响应于所述响应于所述满足第一条件的车辆数量低于第一阈值,进入步骤s500。
[0065]
进一步地,响应于所述响应于所述满足第一条件的车辆数量不低于第一阈值,进入步骤s800。
[0066]
步骤s500、获取满足第二条件的车辆数量。
[0067]
在本实施例中,响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量。
[0068]
进一步地,所述第二条件为所述历史订单数据中距离当前时间点最近的订单为正常还车。
[0069]
进一步地,所述正常还车为在还车过程中没有使用辅助还车流程,且没有被客服后台、用户自助等手段进行过价格干预(调价或者退款)的车辆。
[0070]
进一步地,响应于所述第一阈值为1,响应于检测到满足第一条件的车辆数量低于第一阈值,表示预定范围内距离当前时间点最近的订单为违规停车的车辆数量为0,获取满足第二条件的车辆数量。
[0071]
进一步地,获取满足第二条件的车辆数量如图4所示,包括如下步骤:
[0072]
步骤s510、获取历史订单数据中距离当前时间点最近的订单为异常还车的车辆数量。
[0073]
在一个可选的实现方式中,所述异常还车为车辆距离当前时间点最近的订单为辅助还车成功状态。
[0074]
在另一个可选的实现方式中,所述异常还车为车辆距离当前时间点最近的订单为调价订单。其中,所述调价订单为:由于定位不准确进行还车二被收取额外的管理费用后,用户通过客服后台、用户自助等手段进行过价格干预(调价或者退款)的车辆。
[0075]
在又一个可选的实现方式中,所述异常还车为车辆距离当前时间点最近的订单为辅助还车成功状态,且所述异常还车为车辆距离当前时间点最近的订单为调价订单。其中,所述调价订单为:由于定位不准确进行还车二被收取额外的管理费用后,用户通过客服后台、用户自助等手段进行过价格干预(调价或者退款)的车辆。
[0076]
步骤s520、根据所述车辆总数量和异常还车的车辆数量计算所述满足第二条件的车辆数量。
[0077]
在本实施例中,获取目标车辆的定位点的预定范围内的车辆总数量,根据所述车辆总数量和异常还车的车辆数量计算所述满足第二条件的车辆数量。其中,所述满足第二条件的车辆数量为所述车辆总数量和异常还车的车辆数量的差值。
[0078]
由此,即可获取满足第二条件的车辆数量。
[0079]
步骤s600、检测满足第二条件的车辆数量是否大于第二阈值。
[0080]
在本实施例中,响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量,检测满足第二条件的车辆数量是否大于第二阈值。
[0081]
进一步地,所述第二阈值可以根据实际情况设置,例如0,1,2,3
……
。
[0082]
进一步地,响应于满足第二条件的车辆数量大于第二阈值,进入步骤s700。
[0083]
进一步地,响应于满足第二条件的车辆数量不大于第二阈值,进入步骤s800。
[0084]
步骤s700、进行辅助还车。
[0085]
在本实施例中,响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。
[0086]
进一步地,响应于所述满足第二条件的车辆数量大于第二阈值,表示目标车辆的定位点所在区域通过正常还车流程还车的车辆数量超过一定数量,进行辅助还车。
[0087]
进一步地,所述进行辅助还车如图5所示,包括如下步骤:
[0088]
步骤s710、将所述目标车辆的当前订单标记为辅助还车成功状态。
[0089]
在本实施例中,服务器将所述目标车辆的当前订单标记为辅助还车成功状态,以便后续的运维以及对其它车辆进行辅助还车时减小误差。
[0090]
步骤s720、生成关锁信号发送至所述目标车辆。
[0091]
在本实施例中,服务器生成关锁信号发送至所述目标车辆,以使得用户还车。
[0092]
应理解,上述步骤s710和步骤s720不分执行顺序,可以是顺序执行,也可以是先后执行。
[0093]
步骤s800、将所述目标车辆的当前订单标记为辅助还车失败状态。
[0094]
在本实施例中,响应于所述满足第一条件的车辆数量等于或大于第一阈值,或,所述满足第二条件的车辆数量小于或等于第二阈值,将所述目标车辆的当前订单标记为辅助还车失败状态。不进行辅助还车。
[0095]
由此,可以通过目标车辆的临近车辆对目标车辆进行辅助还车,可以在定位不准确的情况下,通过相邻车辆进行辅助关锁,减小用户经济损失。
[0096]
本发明实施例通过在获取到触发信号后,获取目标车辆的当前定位点的预定范围
内的相邻车辆信息,根据历史订单数据获取满足第一条件的车辆数量,响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量,响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。由此,可以在定位不准确的情况下,通过相邻车辆进行辅助关锁,减小用户经济损失。
[0097]
进一步地,为了提高辅助还车准确率,本发明实施例的控制方法还可以通过运维人员上传的数据进行进一步验证,具体如图6所示,包括如下步骤:
[0098]
步骤s910、获取目标车辆的运维信息。
[0099]
在本实施例中,运维人员检查各车辆的停车位置是否在停车区域,并将检测结果上传至服务器。服务器获取运维人员上传的车辆的运维信息,所述运维信息包括目标车辆的实际位置状态,所述实际位置状态包括停在停车区域和未停在停车区域。
[0100]
步骤s920、响应于所述目标车辆最近的订单为辅助还车成功状态,且实际位置状态为未停在停车区域,将所述目标车辆最近的订单标记为错误辅助。
[0101]
在本实施例中,服务器响应于所述目标车辆最近的订单为辅助还车成功状态,且实际位置状态为未停在停车区域,表示在对该车辆进行辅助还车时出现错误,将所述目标车辆最近的订单标记为错误辅助。
[0102]
步骤s930、响应于所述目标车辆最近的订单为辅助还车成功状态,且实际位置状态为停在停车区域,将所述目标车辆最近的订单标记为正确辅助。
[0103]
在本实施例中,响应于所述目标车辆最近的订单为辅助还车成功状态,且实际位置状态为停在停车区域,表示在对该车辆进行辅助还车结果正确,将所述目标车辆最近的订单标记为正确辅助。
[0104]
步骤s940、响应于所述目标车辆最近的订单为辅助还车失败状态,且所述实际位置状态为停在停车区域,将所述目标车辆最近的订单标记为错误辅助。
[0105]
在本实施例中,响应于所述目标车辆最近的订单为辅助还车失败状态,且所述实际位置状态为停在停车区域,表示在对该车辆进行辅助还车时出现错误,将所述目标车辆最近的订单标记为错误辅助。
[0106]
进一步地,所述方法还包括:退还错误收取的用户的额外管理费用,以提升用户体验,减少用户的经济损失。
[0107]
步骤s950、响应于所述目标车辆最近的订单为辅助还车失败状态,且所述实际位置状态为未停在停车区域,将所述目标车辆最近的订单标记为正确辅助。
[0108]
在本实施例中,响应于所述目标车辆最近的订单为辅助还车失败状态,且所述实际位置状态为未停在停车区域,表示在对该车辆进行辅助还车结果正确,将所述目标车辆最近的订单标记为正确辅助。
[0109]
可选地,所述方法还包括如下步骤:
[0110]
步骤s960、根据上述步骤s910-s950对参数进行调整。
[0111]
在本实施例中,根据运维获取的结果对参数进行调整以提高辅助还车的准确率。
[0112]
进一步地,所述参数包括第一阈值、第二阈值和预定范围的一种或多种。
[0113]
本发明实施例通过在获取到触发信号后,获取目标车辆的当前定位点的预定范围内的相邻车辆信息,根据历史订单数据获取满足第一条件的车辆数量,响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量,响应于所述满足第二条
件的车辆数量大于第二阈值,进行辅助还车。由此,可以在定位不准确的情况下,通过相邻车辆进行辅助关锁,减小用户经济损失。
[0114]
图7是本发明实施例的控制装置的示意图。如图7所示,本发明实施例的控制装置包括相邻车辆获取单元71、第一数量获取单元72、第二数量获取单元73和辅助还车单元74。其中,相邻车辆获取单元71用于响应于获取到触发信号,获取目标车辆的当前定位点的预定范围内的相邻车辆信息,所述相邻车辆信息包括各车辆的历史订单数据。第一数量获取单元72用于根据所述历史订单数据获取满足第一条件的车辆数量。第二数量获取单元73用于响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量。辅助还车单元74用于响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。
[0115]
优选地,所述装置还包括:
[0116]
触发信号接收单元,用于接收终端设备发送的触发信号。
[0117]
优选地,所述装置还包括:
[0118]
触发信号生成单元,用于响应于接收到至少一次终端设备发送的还车请求,且还车失败,生成所述触发信号。
[0119]
优选地,所述第一条件为所述历史订单数据中距离当前时间点最近的订单为违规停车。
[0120]
优选地,所述第二条件为所述历史订单数据中距离当前时间点最近的订单为正常还车。
[0121]
优选地,所述车辆信息还包括车辆总数量;
[0122]
其中,所述第二数量获取单元包括:
[0123]
异常数量获取子单元,用于获取历史订单数据中距离当前时间点最近的订单为异常还车的车辆数量;以及
[0124]
计算子单元,用于根据所述车辆总数量和异常还车的车辆数量计算所述满足第二条件的车辆数量;
[0125]
其中,所述满足第二条件的车辆数量为所述车辆总数量和异常还车的车辆数量的差值。
[0126]
优选地,所述异常还车的车辆包括:
[0127]
距离当前时间点最近的订单为辅助还车成功状态;和/或
[0128]
距离当前时间点最近的订单为调价订单。
[0129]
优选地,所述辅助还车单元包括:
[0130]
第一标记模块,用于将所述目标车辆的当前订单标记为辅助还车成功状态。
[0131]
优选地,所述辅助还车单元还包括:
[0132]
关锁信号生成模块,用于生成关锁信号发送至所述目标车辆。
[0133]
优选地,所述装置还包括:
[0134]
第二标记单元,用于响应于所述满足第一条件的车辆数量等于或大于第一阈值,和/或,所述满足第二条件的车辆数量小于或等于第二阈值,将所述目标车辆的当前订单标记为辅助还车失败状态。
[0135]
优选地,所述装置还包括:
[0136]
运维信息获取单元,用于获取目标车辆的运维信息,所述运维信息包括目标车辆
的实际位置状态,所述实际位置状态包括停在停车区域和未停在停车区域;以及
[0137]
第一错误标记单元,用于响应于所述目标车辆最近的订单为辅助还车成功状态,且实际位置状态为未停在停车区域,将所述目标车辆最近的订单标记为错误辅助;以及
[0138]
第一正确标记单元,用于响应于所述目标车辆最近的订单为辅助还车成功状态,且实际位置状态为停在停车区域,将所述目标车辆最近的订单标记为正确辅助。
[0139]
优选地,所述装置还包括:
[0140]
第二错误标记单元,用于响应于所述目标车辆最近的订单为辅助还车失败状态,且所述实际位置状态为停在停车区域,将所述目标车辆最近的订单标记为错误辅助;以及
[0141]
第二正确标记单元,用于响应于所述目标车辆最近的订单为辅助还车失败状态,且所述实际位置状态为未停在停车区域,将所述目标车辆最近的订单标记为正确辅助。
[0142]
本发明实施例通过在获取到触发信号后,获取目标车辆的当前定位点的预定范围内的相邻车辆信息,根据历史订单数据获取满足第一条件的车辆数量,响应于所述满足第一条件的车辆数量低于第一阈值,获取满足第二条件的车辆数量,响应于所述满足第二条件的车辆数量大于第二阈值,进行辅助还车。由此,可以在定位不准确的情况下,通过相邻车辆进行辅助关锁,减小用户经济损失。
[0143]
图8是本发明实施例的电子设备的示意图。图8所示的电子设备为通用数据处理装置,其包括通用的计算机硬件结构,其至少包括处理器81和存储器82。处理器81和存储器82通过总线83连接。存储器82适于存储处理器81可执行的指令或程序。处理器81可以是独立的微处理器,也可以是一个或者多个微处理器集合。由此,处理器81通过执行存储器82所存储的指令,从而执行如上所述的本发明实施例的方法流程实现对于数据的处理和对于其它装置的控制。总线83将上述多个组件连接在一起,同时将上述组件连接到显示控制器84和显示装置以及输入/输出(i/o)装置85。输入/输出(i/o)装置85可以是鼠标、键盘、调制解调器、网络接口、触控输入装置、体感输入装置、打印机以及本领域公知的其他装置。典型地,输入/输出装置85通过输入/输出(i/o)控制器86与系统相连。
[0144]
本领域的技术人员应明白,本发明的实施例可提供为方法、装置(设备)或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品。
[0145]
本发明是参照根据本申请实施例的方法、装置(设备)和计算机程序产品的流程图来描述的。应理解可由计算机程序指令实现流程图中的每一流程。
[0146]
这些计算机程序指令可以存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现流程图一个流程或多个流程中指定的功能。
[0147]
也可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程中指定的功能的装置。
[0148]
以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域技术人员而言,本发明可以有各种改动和变化。凡在本发明的精神和原理之内所作的任何修改、等同
替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1