信息处理方法、信息处理装置、生产系统和物品制造方法与流程
1.本发明涉及信息处理方法。
背景技术:
2.序列程序被用于控制设置在生产线中的设备的动作。作为执行这种类型的序列程序的控制单元,称为序列器或可编程逻辑控制器(plc)的控制器被使用。然后,作为序列程序的输出模式中的一种,所谓的梯形电路被广泛采用。
3.由序列器或plc控制的设备是具有诸如由作为控制对象的多个驱动轴的各组动作轴构成的传输部分、组装部分和加工部分的结构要素和单元的生产设备,诸如例如操纵工具的机器人和传输单元。
4.迄今为止,为了有效地准备这种序列程序,如在日本专利申请no.h07
‑
191717中公开的,已知存在在时间图中设定控制对象的各动作轴的序列动作定时并基于与输入/输出地址的关系设定各动作轴的时间图的布置。
5.根据在日本专利申请no.h07
‑
191717中描述的布置,用户必须读取动作轴的动作定时并且描述假设时间图中的序列程序作为例如补充解释的设定。关于这一点,日本专利申请no.h05
‑
333907公开通过在时间图的表部分中描述同步各动作轴的动作定时的控制数据来准备序列程序的布置。
6.存在诸如plc和序列器的控制单元根据序列程序同步操作自动组装机器的独立可动作单元的情况。然而,这种布置需要多个相关单元相互关联的时间图。因此,在如日本专利申请no.h07
‑
191717所公开的那样在一张时间图中设定作为控制对象的动作轴的序列动作的定时的情况下,难以描述动作中的单元通过交换同步信号和确认信号彼此同步动作的定时。更进一步,在同一时间图中设定导致交换工件等的控制对象的动作轴的定时的情况下,动作轴的动作定时仅仅最终为相同时基的定时。因此,难以生成以联锁方式操作单元的这种序列程序。
技术实现要素:
7.根据本发明的第一方面,信息处理方法包括获取指示对应于多个控制对象的动作的动作线和动作之间的联锁模式的时间图以及基于时间图生成对应于多个控制对象的动作的序列程序。
8.根据本发明的第二方面,信息处理装置包括控制部分,其中,控制部分获取指示对应于多个控制对象的动作的动作线和动作之间的联锁模式的时间图,并且基于时间图生成对应于多个控制对象的动作的序列程序。
9.参照附图阅读示例性实施例的以下说明,本发明的其它特征将变得清晰。
附图说明
10.图1是示意性地示出被配置为生成序列程序的信息处理装置的配置的框图。
11.图2示意性地示出根据本公开的示例性实施例的时间图。
12.图3是示出根据本公开的示例性实施例的时间图转换方法的流程图。
13.图4示出根据本公开的示例性实施例的时间图的示例。
14.图5示出时间图转换数据的示例。
15.图6示出动作序列数据的示例。
16.图7以梯形电路的形式示出生成的序列程序的示例。
具体实施方式
17.将参考附图描述用于实施本公开的模式。注意,下面描述的配置终归是一个示例,并且,例如详细的配置可以由本领域技术人员在不脱离本公开的要点的范围内适当地修改。此外,在本示例性实施例中采用的数值仅仅是参考数值的示例。
18.作为图1中的本示例性实施例的信息处理装置的序列程序生成装置101是由cpu 1601、存储器1602等构成的处理器,并且例如由个人计算机控制。
19.显示单元102是使用诸如各种显示面板的显示设备的显示器。输入单元103由诸如键盘和鼠标的指示设备构成。显示单元102和输入单元103构成序列程序生成装置101的用户界面。例如,该用户界面可以由gui(图形用户界面)构成,并且可以利用通过使用输入单元103操作显示于显示单元102上的画面的输入操作系统。
20.序列程序生成装置101包括被配置为输入时间图的时间图输入部分110、被配置为将输入的时间图转换为序列数据的时间图转换部分111和被配置为存储转换的时间图数据的时间图信息存储部分112的功能块。
21.序列程序生成装置101还包括被配置为输入生成序列程序所需的输入/输出地址和模型程序的控制信息输入部分120。序列程序生成装置101还包括被配置为存储输入的控制信息的控制信息存储部分121的功能块。控制信息存储部分121包括后面描述的各数据的存储区域。序列程序生成装置101还包括被配置为基于存储的时间图数据和控制信息生成序列程序的序列程序生成部分113。序列程序生成装置101还包括被配置为输出生成的控制程序的程序输出部分114。
22.上述的序列程序生成装置101的各个功能块可以由执行存储于存储部分1602的rom中的控制程序的cpu 1601实现。在这种情况下,存储部分1602的ram被用作cpu 1601的工作区域。除了存储部分1602的rom或未示出的hdd以外,用于实现后面描述的控制过程的控制程序可以存储在各种光盘或磁盘以及半导体存储器设备中。存储实现本示例性实施例的控制程序的这种存储介质构成本公开的计算机可读存储介质。实现本示例性实施例的控制程序可以被安装在rom1602或未示出的hdd中或者通过如上所述的便携式存储介质被更新。然而,在控制程序通过接口1603(i/f)与未示出的各种有线或无线连接网络连接的情况下,可以通过网络安装或更新实现本示例性实施例的控制程序。
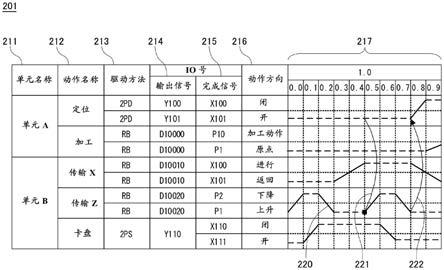
23.图2示出在本示例性实施例中假定的时间图201的一个示例。图2中的时间图201包括描述包含于自动组装机器中的单元的名称的单元名称211的列。图2中的时间图201还包括描述构成各单元的控制对象(即动作轴或驱动轴)的动作的动作名称212的列以及描述用于操作和驱动动作轴的方法的驱动方法213的列。
24.图2中的时间图201还包括控制驱动方法时所需的输出信号214和完成信号215的
列以及描述动作的方向的动作方向216的列。图2中的时间图201还包括被配置为以网格指示时基的时间指示部分217和通过斜线指示控制对象的动作轴的动作状态的转换的动作状态转换线220。图2中的时间图201还包括用于同步操作单元和单元的动作的同步启用触发线221和同步完成触发线222。
25.在图2中的时间图201中还注意到,动作状态转换线220、同步启用触发线221和同步完成触发线222的开始点和结束点分别位于时间指示部分217的网格的延长线上。在时间图201中,同步启用触发线221表示,当单元a的定位动作结束时,同步启用触发信号即同步信号触发从单元a被传送到单元b的z方向的传输部分。此外,同步完成触发线222表示,同步完成触发信号即同步信号确认从单元b的z方向的传输部分被传送到单元a。然后,同步启用触发线221的端子端形成为菱形或矩形,并且,同步完成触发线222的端子端形成为箭头形或三角形。在后面描述的图2和图4中的时间图201的左侧,在单元a、b和c之间通过以相同的端子端符号指示功能的动作启用触发线和同步完成触发线连接各单元的动作线。
26.即,本示例性实施例的时间图201具有使得能够通过相互交换和传送/接收由同步启用触发信号即同步信号触发和同步完成触发信号即同步信号确认构成的同步信号描述多个单元的同步操作联锁关系的规范。该联锁模式可以由分别对应于多个单元的关联动作线的图形要素(例如,图2的情况下的箭头或互连线)定义。然后,在这些箭头中,能够通过同步启用触发即同步信号触发的端子端处的菱形形状或矩形形状以及通过同步完成触发信号或同步信号确认的端子端处的箭头或三角形,定义联锁模式。
27.然后,gui即显示单元102和输入单元103被布置为使得用户例如在输入指示不同联锁即同步关系的箭头即互连线时从下拉菜单选择对应于同步信号触发/同步信号确认中的任一个的项目。例如,可以通过用诸如输入单元103的鼠标的指示设备点击两端位置或在期望的线上拖动的方法,输入规定联锁即同步关系的箭头即互连线。在这种情况下,cpu 1601可以立即识别通过点击/拖动输入进行的图形要素的输入是否与规定对应于同步信号触发/同步信号确认中的任一个的联锁即同步关系的箭头即互连线相关。
28.然而,在本示例性实施例的由显示单元102和输入单元103构成的gui中,时间图201的左侧由图2和图4所示的表格的形式的输入栏配置。然后,用户可以在图2左侧的表格部分中描述单元的动作的规范。在图2的情况下,用户可以在单元名称211、动作名称212、驱动方法213、与输出信号214和完成信号215相关的io编号、以及动作方向216的各个栏中描述相应的规范。
29.因此,在cpu 1601要识别与规定联锁即同步关系的箭头即互连线相关的信号的规范的情况下,cpu 1601可以参考时间图201左侧的信息,诸如输出信号214、完成信号215和动作方向216。在这种情况下,如果由点击/拖动输入规定的图形要素与时间图201的左侧的信息相反,则还能够布置以输出指示报警消息的报警/控制错误。该布置使得能够促使用户进行动作,以使图形要素与时间图201左侧的信息匹配。
30.此外,在使用由显示单元102和输入单元103构成的gui的情况下,cpu 1601可以彼此相互关联地处理图2和图4中的时间图201的线图部分即右侧部分中的图形与图2和图4中的左侧的表格部分即左侧部分中的信息。例如,在对右侧的线图部分的图形或左侧的表格部分中的任一个进行编辑或输入的情况下,cpu 1601可以更新左侧的表格部分或右侧的线图部分的图形中的另一个。例如,在同步启用触发线221或同步完成触发线222在线图部分
的图形中被输入和编辑的情况下,cpu 1601可以响应于此即时识别相应的动作数据和信号规范。然后,cpu 1601可以更新左侧的表格部分的各个栏211~216的内容,以与例如线图部分的图形中的同步启用触发线221或同步完成触发线222的输入和编辑匹配。
31.如上所述,本示例性实施例的时间图201被布置为能够例如通过图形要素描述多个单元通过交换同步信号而相互联锁和同步动作的动作模式。此外,在表格部分被设置在时间图201中的情况下,能够通过gui上的动作关联图形要素和表格部分中的字符和数值数据并以联锁方式处理它们的编辑和输入。
32.接下来,将参考图1和图3具体描述本公开的用于转换时间图的方法。首先,通过序列程序生成装置101的时间图输入部分110输入时间图。根据显示于显示单元102的画面上的指令,通过输入单元103进行输入。显示单元102和输入单元103构成诸如gui的用户界面。当从诸如输入单元103的用户界面规定要转换的时间图时,cpu 1601开始时间图转换部分111的处理。
33.在图3中的步骤s301中,时间图转换部分111根据从时间图输入部分110输入的时间图获取控制对象(例如,动作轴)的如图5的上部所示的动作定时数据。时间图转换部分111还根据在步骤s301中从时间图输入部分110输入的时间图获取使各单元彼此同步所需的如图5的下部所示的同步数据。
34.接下来,在步骤s302中,时间图转换部分111从同步数据的接收/传送侧信息获取导致动作启用信号即同步信号和动作完成信号即确认信号被输出的同步信号触发定时数据。时间图转换部分111还从同步数据的接收/传送侧的信息获取确认动作启用信号即同步信号和动作完成信号即确认信号的同步信号的同步信号确认定时数据。然后,将这些动作定时数据与同步信号触发定时数据相关联,时间图转换部分111将同步信号确认定时数据存储为每单元的动作数据。
35.接下来,时间图转换部分111在步骤s303中对每单元的动作数据进行分类以与动作序列匹配,以转换和输出为每单元的动作序列数据。每单元的该动作序列数据被存储在时间图信息存储部分112中。
36.下面将参考图1描述本示例性实施例的序列程序的生成处理。在图1的控制信息存储部分121中登记生成序列程序所需的信息,诸如内部设备地址的分配和序列程序的模型。通过根据由显示单元102显示的画面消息操作输入单元103,该数据被登记在控制信息存储部分121中。
37.序列程序生成部分113通过对应于时间图信息存储部分112内的每单元的序列控制数据改变存储在控制信息存储部分121中的模型数据生成序列程序。例如,序列程序生成部分113通过基于每单元的动作序列数据和内部设备地址的分配转换在控制信息存储部分121中登记的序列程序的模型的地址改变的部分来生成序列程序。作为序列程序,序列程序生成部分113分别生成管理序列动作的进度管理程序和用于输出动作命令的输出程序。
38.注意,生成每单元的序列程序,使得序列动作由启动命令启动,序列动作的步骤计数随着一系列序列动作的完成被复位,并且,从序列动作的开始重复动作,直达启动命令到期时为止。生成的序列程序以可以通过序列程序输出部分114在plc中登记的文件形式被输出。
39.虽然下面将通过例示的示例性实施例具体描述本发明,但本发明不限于以下的示
例性实施例。
40.第一示例性实施例
41.例如,在本示例性实施例中,将从图4所示的时间图生成序列程序。
42.首先,时间图转换部分111在控制信息存储部分121中登记序列程序的模型程序和内部设备地址的分配。在管理序列的序列动作的进度管理程序的模型中登记的电路中的一个是在确认控制对象的动作轴的动作完成之后前进到下一步骤的模式的电路即条件电路。
43.更进一步,在进度管理程序的模型中登记的电路中的一个是许可完成等待电路。该电路即许可完成等待电路是用于确认单元的同步定时的。即,许可完成等待电路是通过将干扰动作的动作启用信号输出到相对单元并且通过确认通知已从启用信号被输出到的单元完成干扰动作的完成信号的输出前进到下一步骤的模式的电路。
44.在进度管理程序的模型中登记的另一电路是通过确认干扰动作的启用信号前进到下一步骤的模式的电路,即,许可等待电路。在进度管理程序的模型中登记的又一电路是导致干扰动作的启用信号已被输出到的单元输出通知已完成干扰动作的动作的完成信号并且确认关于干扰动作的启用信号的输出过期的模式的电路,即,完成电路。
45.准备用于电磁阀的两位置双螺线管电路和两位置单螺线管的电路以及用于驱动机器人的专用电路,以在输出信号中驱动控制对象的动作轴。作为单元的同步定时的信号的启用信号和完成信号也被登记。各个输出程序的动作命令被依次转换为动作的步骤。各动作命令被连续输出,直到当满足前进步骤的条件时为止。随着进行中的步骤的推进,动作命令被减活(deactivate)。内部设备地址被分配,以不与在序列程序中使用的线圈即驱动部分的地址重叠。
46.当通过时间图输入部分110输入图4中的时间图时,时间图转换部分111生成序列控制数据。在图3中的步骤s301中,时间图转换部分111将时间图转换为动作定时数据和同步数据。当在步骤s301中生成动作定时数据时,时间图转换部分111将动作状态转换线220的开始点和结束点的位置与时间指示部分217的网格进行对比,以计算作为动作开始时间的开始点侧和作为动作结束时间的结束点侧的各自时间。此外,时间图转换部分111分别提取图4的时间图的在端侧的单元名称211中描述的单元名称、在驱动方法213中描述的驱动方法、在输出信号214中描述的输出信号信息和在完成信号215中描述的完成信号信息。
47.然后,基于从输入的时间图读取的时间信息、同步信号或确认即完成信号的规范,时间图转换部分111获取如图5的上部所示的动作定时数据。图5中的动作定时数据包括单元名称5011即unitname、驱动方法5012即drive和输出信号信息5013即outaddress的列。图5中的动作定时数据还包括完成信号信息5014即inaddress、动作开始时间5015即starttime和动作结束时间5016即endtime的列。
48.同时,时间图转换部分111从对应于从输入的时间图读取的同步启用触发和同步完成触发的图形要素生成如图5的下部所示的同步数据502。即,时间图转换部分111将图4中的同步启用触发线221或同步完成触发线222的开始点和结束点的位置与时间指示部分217的网格进行对比,以计算作为动作开始时间的开始点侧和作为动作结束时间的结束点侧的各个时间。此外,时间图转换部分111分别提取在开始点侧和结束点侧的单元名称211中描述的单元名称。图5的下部所示的同步数据包括区分同步信号或确认即完成信号或触发线的类型的信息5026。在信息5026中,如果端子端的形状是菱形,则将意为允许的kyoka
的信息应用于开始点,如果端子端的形状是箭头,则将意为完成的kanryo的信息应用于开始侧。更进一步地,在信息5026中,如果允许开始侧,则对结束侧应用意为等待允许的kyokawait的信息,如果完成开始侧,则对结束侧应用意为等待完成的kanryowait的信息。
49.在图5的下部所示的该同步数据502包括从时间图读取的开始侧单元名称5021即startunit和结束侧单元名称5025即endunit。图5的下部所示的同步数据502还包括动作开始时间5024即starttime和用作结束定时的动作结束时间5027即endtime。图5的下部中的同步数据502还包括开始侧触发线类型5022即starttype和结束侧触发线类型5026即endtype。
50.时间图转换部分111在时间图中的所有动作状态转换线220即动作线、同步启用触发线221和同步完成触发线222上重复执行上述动作定时数据501和同步数据502的转换,即图3中的步骤s301。此外,在同步数据502(图5的下部)中,时间图转换部分111在生成序列程序时将内部设备的地址分配给同步信号的线圈。为此,时间图转换部分111从最早的动作开始时间5024即starttime依次对动作进行分类,将它们与开始侧单元名称5021即startunit进行对比,并且从最早的动作开始时间依次按序列号应用每个单元的线圈号5023即interfacecoil。因此,时间图转换部分111分别生成图5的上部和下部所示的动作定时数据501和同步数据502。
51.接下来,在图3的步骤s302中,时间图转换部分111从动作定时数据501和同步数据502生成要设置在序列程序中的动作数据。这里,时间图转换部分111依次分配每单元的动作定时数据,以从单独存储的动作定时数据501和同步数据502生成每单元的动作数据。接着,时间图转换部分111从存储的同步数据生成用于输出动作启用信号和动作完成信号的定时。为此,时间图转换部分111在图5的下部的同步数据502中提取开始侧单元名称5021即startunit。然后,基于提取出的开始侧单元名称5021即startunit,时间图转换部分111将以下控制信息应用于每单元分配的动作定时数据。由此,时间图转换部分111可以生成如图6所示的最终用作序列程序中的动作数据的动作序列数据600。注意,图6中的动作序列数据600处于完成了后面描述的图3中的步骤s303中的分类的状态。
52.图6中的动作序列数据600包括从图5中的动作定时数据501和同步数据502的各个要素转换的以下各个要素。例如,时间图转换部分111使用图5中的开始侧的开始侧单元名称5021即startunit作为图6中的单元名称6011即unitname。另外,时间图转换部分111从图5中的动作定时数据501的驱动方法5012即drive获取图6中的动作序列数据600中的驱动方法6012即drive。以相同方式,时间图转换部分111从图5中的动作定时数据501的输出信号信息5013即outaddress获取图6中的动作序列数据600中的输出信号信息6013即outaddress,并且从图5的动作定时数据501的完成信号信息5014即inaddress获取图6中的动作序列数据600中的完成信号信息6014即inaddress。时间图转换部分111还使用图5中的开始侧触发线类型5022即starttype作为图6中的同步定时类型6017即interfacetype,并且使用图5中的每单元的线圈号5023即interfacecoil作为图6中的线圈号6018即interfacecoil。时间图转换部分111从图5中的动作开始时间5015和5024即starttime以及从动作结束时间5016和5027即endtime生成图6中的各动作数据的动作开始时间。这些时间是动作开始时间6015即starttime和动作结束时间6016即endtime。注意,对于同步信号和确认信号的开始侧的同步定时,时间图转换部分111将同步启用触发线221的开始点和同步
完成触发线222的开始点设定为同步触发定时。更进一步,时间图转换部分111将动作开始时间5024即srarttime的值作为结束定时原样替换到动作结束时间6016即endtime中。
53.接下来,时间图转换部分111从图5中的同步数据502生成确认动作启用信号和动作完成信号的定时。这里,时间图转换部分111从图5中的同步数据502提取结束侧单元名称5025即endunit。然后,基于这样提取的结束侧单元名称5025即endunit,时间图转换部分111使用图5中的结束侧单元名称5025即endunit作为图6中的单元名称6011unitname。时间图转换部分111还使用图5中的结束侧的触发线类型5026即endtype作为图6中的同步定时类型6017即interfacetype。然后,时间图转换部分111将每单元6018的线圈号即interfacecoil、动作开始时间6015即starttime和动作结束时间6016即endtime分别应用于这些动作数据。关于同步信号和确认信号的结束侧同步定时,同步启用触发线221的结束点和同步完成触发线222的结束点被设定为同步触发定时。因此,时间图转换部分111在图6中原样将图5中的同步数据502的动作结束时间5027即endtime的值替换为动作开始时间6015即starttime。
54.接下来,在图3中的步骤s303中,时间图转换部分111逐个单元、逐个动作序列地对动作数据进行分类。这里,分类键按照单元和与动作序列相关的时间信息。关于时间信息,特别地,时间图转换部分111将动作开始时间6015即starttime设定为第一优先级信息。时间图转换部分111还将动作结束时间6016即endtime设定为第二优先级信息,使得序列顺序的处理优先于控制对象的动作处理。然后,在多个同步定时同时的情况下,时间图转换部分111将同步定时调整为放入意为“完成”的kanryo
→
意为“允许”的kyoka
→
意为“等待完成”的kanryowait
→
意为“等待允许”的kyokawait的序列顺序。时间图转换部分111通过将同步定时的类型即interfacetype设定为第三优先级信息来执行该调整。通过在这种分类条件下对每单元的动作数据进行分类,能够获取通过如图6所示的每单元的时间信息分类的动作序列数据600。
55.接下来,图1中的时间图转换部分111基于图6中的动作序列数据600生成相应的序列程序。即,时间图转换部分111将如上所述生成的每单元的动作序列数据600存储到时间图信息存储部分112中。
56.接着,序列程序生成部分113基于从图4中的时间图201获取的图6中的动作序列数据600生成序列程序。此时,序列程序生成部分113基于在时间图信息存储部分112内按每单元分类的图6中的动作序列数据600生成序列程序。在生成序列程序时,序列程序生成部分113使用事先在控制信息存储部分121中准备的序列程序的模型程序中的内部设备地址的分配。
57.因此,输出例如图7所示的序列程序。图7中的序列程序以图6上段中的经分类的单元a的仅仅部分的梯形电路的形式以图形方式被示出。在图7中的梯形电路700即序列程序中,电路701由对应于图6上段中的单元a的部分的七条线的电路m1~m7构成。这些电路m1~m7的元件702是通过使用输出信号信息6013即outaddress、完成信号信息6014即inaddress和同步定时类型6017即interfacetype等生成的。注意,实际上可以从序列程序输出部分114输出到plc的是二进制数据,该二进制数据例如相当于图7中的梯形电路,可在plc中登记并且可由plc执行。通常,可在plc中加载的程序可执行形式是助记符(mnemonic)和二进制代码以预定格式被设置的二进制数据的形式。
58.如上所述生成的序列程序可用于制造物品的生产系统中。即,通过由诸如控制各单元的plc的控制器执行所生成的序列程序,控制由多个控制对象组成的各单元。该布置使得能够控制在各单元中的工件上实现的装配和加工工作,并且能够在由各个单元组成的生产系统中制造物品。
59.如上述示例性实施例所示的,即使在响应于同步信号使用多个确认信号的情况下,也能够通过时间图中的图形要素描述联锁模式。然后能够从时间图自动生成精确呈现联锁模式的序列程序。
60.能够通过实现上述示例性实施例的一个或多个功能并且通过网络或存储介质或者甚至通过通过由系统或装置的计算机中的一个或更多个处理器读取程序执行的处理供给到系统或装置的程序实现本公开。还能够通过实现一个或多个功能的电路(例如asic)来实现。此外,上述示例性实施例适用于能够基于设置在作为要通过序列程序控制的对象的控制单元中的存储设备的信息自动进行伸缩运动、弯曲和拉伸运动、垂直运动、水平运动或旋转运动或其复杂运动的机器。
61.其他实施例
62.也可通过读出并执行记录于存储介质(也可被更完整地称为“非暂时性计算机可读存储介质”)上的计算机可执行指令(例如,一个或更多个程序)以执行一个或更多个上述实施例中的功能并且/或者包含用于执行一个或更多个上述实施例中的功能的一个或更多个电路(例如,应用特定集成电路(asic))的系统或装置的计算机,或者,通过由系统或装置的计算机通过例如读出并执行来自存储介质的计算机可执行指令以执行一个或更多个上述实施例中的功能并且/或者控制一个或更多个电路以执行一个或更多个上述实施例中的功能执行的方法,实现本发明的实施例。计算机可以包括一个或更多个处理器(例如,中央处理单元(cpu)、微处理单元(mpu)),并且可包含单独的计算机或单独的处理器的网络,以读出并执行计算机可执行指令。计算机可执行指令可例如从网络或存储介质被提供给计算机。存储介质可包含例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储器、光盘(诸如紧致盘(cd)、数字万用盘(dvd)或蓝光盘(bd)
tm
)、快擦写存储器设备和记忆卡等中的一个或更多个。
63.本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
64.虽然已参照示例性实施例说明了本发明,但应理解,本发明不限于公开的示例性实施例。所附权利要求的范围应被赋予最宽的解释以包含所有的这样的修改以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1