一种基于多摄像头融合的多目标追踪方法
1.本发明结合深度学习与计算机视觉算法,具体公开了一种基于多摄像头融合的多目标追踪方法。
背景技术:
2.多目标跟踪因其学术和商业潜力,在计算机视觉中逐渐备受关注。尽管如今已经有多种多样的方法来处理这个课题,但诸如目标重叠、外观剧变等问题仍然是它所面临的重大挑战。如何更有效的解决目标重叠等问题,对于多目标跟踪技术的应用具有巨大意义,为了解决所有这些问题,在过去的几十年里,人们提出了广泛的解决方案
3.多目标跟踪(multiple object tracking or multiple target tracking,mot or mtt)主要任务是在给定视频中同时对多个感兴趣的目标进行定位,并且维持他们的id、记录他们的轨迹。这些目标可以是路上的行人,路上的车辆,操场上的运动员,或者多组动物(鸟,蝙蝠,蚂蚁,鱼,细胞等等),甚至是一个单目标中的不同部分。多目标跟踪除了具有单目标尺度变化,出平面旋转和光照变化等挑战,多目标跟踪还需要处理更复杂的关键问题包括:1)频繁遮挡;2)轨道初始化和终止;3)相似的外观;4)多目标间的相互影响。
4.而工业界关注度最高的多目标跟踪算法,非sort、deepsort莫属了。这两类算法通过检匹配过程和卡尔曼预测加更新的方式,实现多目标追踪,但面对遮挡、id switch问题仍无法很好的解决。
5.本方法,结合深度学习与计算机视觉的方法,构建以一个基于deepsort之上,融合多摄像头的多目标跟踪算法,能够很好解决遮挡、id交换问题。
技术实现要素:
6.本发明的目的在于提出一种基于多摄像头融合的多目标追踪方法,其采用如下方案:
7.一种基于多摄像头融合的多目标追踪方法,包括如下步骤:
8.s1、通过检测器检测得到目标检测框;
9.s2、卡尔曼滤波预测目标下一时刻位置;
10.s3、级联匹配和iou匹配对预测框与检测框进行关联;
11.s4、使用匈牙利算法将预测后的轨迹和当前时刻检测框进行匹配;
12.s5、通过辅助视角对匹配进行矫正;
13.s6、卡尔曼滤波更新;
14.进一步,上述步骤s1中,通过yolov4目标检测,获取待检测目标的检测框;
15.进一步,上述步骤s2中,通过卡尔曼滤波技术,对检测到的目标进行下一时刻的预测;
16.进一步,上述步骤s3中,级联匹配和iou匹配对预测框与检测框进行关联
17.进一步,具体关联过程为:
18.s31、通过马氏距离对检测框以及预测框进行距离度量;
19.s32、通过余弦距离对表观特征进行度量
20.s33、通过iou交并比对重合程度进行度量
21.进一步,上述步骤s4中,使用匈牙利算法寻找检测框与预测框的最优匹配。
22.进一步,上述步骤s5中,通过辅助视角对匹配进行矫正
23.进一步,矫正的过程为:
24.s51、通过相机标定算法,将会匹配框进行真实场景还原
25.s52、通过辅助摄像头,对匹配结果进行校正
26.s53、修改并还原矫正结果
27.进一步,上述步骤s6中,卡尔曼滤波更新。
28.本发明具有如下优点:
29.本发明方法通过深度神经网络与计算机视觉的方法,通过检测加预测的形式对多目标进行实时的追踪,同时针对多目标跟踪存在的遮挡等固有问题,提出使用多摄像头辅助的方案,通过辅助视角,对主摄像头遮挡位置进行位置矫正,改善因遮挡带来的id交换等问题,提高多目标检测的准确度。
附图说明
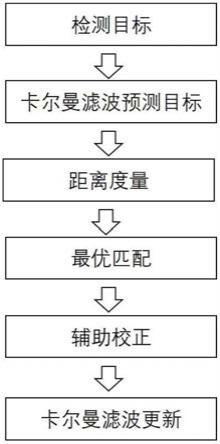
30.图1为本发明中一种基于多摄像头融合的多目标追踪方法的流程框图;
31.具体实施方法
32.下面结合附图1以及具体实施方式对本发明作进一步详细说明:
33.结合图1所示,一种基于多摄像头融合的多目标追踪方法,包括如下步骤:
34.s1、通过检测器检测得到目标检测框
35.为了鲁棒的实现多目标追踪,本方法采用了检测加预测的方式,用过更快速更有效的yolov4实现从视频帧中完成追踪人物的检测工作。
36.s2、卡尔曼滤波预测目标下一时刻位置
37.检测算法单纯实现人物从图片中的位置检测,无法实现帧与帧之间同一个人的关联,通过卡尔曼滤波对当前时刻的人物进行下一时刻的预测,为匹配关联提供参考依据,具体计算过程如下:
38.基于之前的轨迹来预测当前时刻的轨迹
39.x
′
=fx
40.其中χ为轨迹在t
‑
1时刻的状态向量,f为状态转移矩阵,该公式预测t时刻的状态向量x
′
:
[0041][0042]
其中,cx,cy分别表示目标中心点的横坐标和纵坐标位置,r表示长宽比,h表示高,其余四个为对应的导数
[0043]
s3、级联匹配和iou匹配对预测框与检测框进行关联;
[0044]
s31、通过马氏距离对检测框以及预测框进行距离度量:
[0045]
[0046]
d
j
代表第j个检测框的位置,y
i
代表第i个追踪器对目标的预测位置,s
i
代表两者之间的协方差矩阵,通过计算框与框之间的距离,对检测框与预测框进行关联,当然除了距离上的把控,仍需要看框内的表观特征的关联度
[0047]
s32、通过余弦距离对表观特征进行度量
[0048][0049]
通过神经网络对检测框以及预测框提取128维度的特征向量,通过12正则化到一个单位球的超球面上,通过求两个特征向量间的余弦距离,r
j
对应第j个检测的特征向量,对应跟踪的特征向量,其中跟踪的特征向量是一个集合,保留过去成功跟踪的k次的特征向量
[0050]
s33、通过iou交并比对重合程度进行度量
[0051][0052]
其中area(a)∩area(b)为检测框与预测框相交的面积,rea(a)∩area(b)为其相并的面积。
[0053]
s4、使用匈牙利算法寻找检测框与预测框的最优匹配;
[0054]
匈牙利算法主要用于解决分配问题,找到一个最优分配,使得完成所有任务的代价最小,又叫km算法。其具体的计算过程如下:
[0055]
1.对于矩阵的每一行,减去其中最小的元素
[0056]
2.对于矩阵的每一列,减去其中最小的元素
[0057]
3.用最少的水平线或垂直线覆盖矩阵中所有的0
[0058]
4.如果线的数量等于n,则找到了最优分配,算法结束,否则进入步骤55.找到没有被任何线覆盖的最小元素,每个没被线覆盖的行减去这个元素,每个被线覆盖的列加上这个元素,返回步骤3。
[0059]
s5、通过辅助视角对匹配进行矫正;
[0060]
为了更好的改善因遮挡带来的id交换问题,通过多个辅助摄像头对遮挡区域进行辅助校正。
[0061]
s51、通过相机标定算法,将会匹配框进行真实场景还原
[0062]
通过摄像头视角与真实场景选择关键点,计算摄像视角到真实场景的转换矩阵,计算过程如下:
[0063]
1.在真实场景选定四个标记点分别为p1、p2、p3、p4,其在摄像头中的对用点分别为q1、q2、q3、q4,对元素进行组合,计算p,q
[0064]
p=[p1,p2,p3]
t
q=[q1,q2,q3]
t
[0065]
2.计算权重
[0066]
v=(p
‑1)
t
*p
4t
[0067]
r=(q
‑1)
t
*q
4t
[0068]
[0069][0070]
3.计算转换矩阵
[0071]
t
′
=(q
t
*w*p)
t
[0072]
s52、通过辅助摄像头,对匹配结果进行校正
[0073]
通过标定矩阵,将摄像头中位置进行还原到真实场景,将主摄像头匹配结果与辅助摄像头匹配结果进行校正。
[0074]
s53、修改并还原矫正结果
[0075]
依据辅助摄像头,对于匹配结果进行重新的修订。
[0076]
s6、卡尔曼滤波更新
[0077]
1.测量矩阵h将轨迹的均值向量x
′
映射到检测空间
[0078][0079]
2.将协方差矩阵p
′
映射到检测空间,加上噪声矩阵
[0080]
s=hp
′
h
t
+r
[0081]
3.计算卡尔曼增益k,用于估计误差的重要程度
[0082]
k=p
′
h
t
s
‑1[0083]
4.计算更新后的均值向量x和协方差矩阵p
[0084]
x=x
′
+k
y
[0085]
p=(1
‑
kh)p
′
[0086]
当然,以上说明仅仅为本发明的较好实施例,本发明并不限于列举上述实施例,应当说明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变形形式,均落在本说明书的实质范围之内,理应受到本发明的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1