定位方法、转换关系的获取方法、检测方法及系统与流程
本发明涉及光学检测,尤其涉及一种定位方法、转换关系的获取方法、检测方法及系统。
背景技术:
1、随着现代工业的发展,精密加工被用到越来越多的领域;同时,对于加工精度也有越来越高的要求。为了满足加工精度的需求,提高加工样品的合格率,需要经常对加工过程及加工的产品进行关于形貌畸变的测试,以确保畸变在可容忍范围。
2、在精密加工的畸变检测应用中,经常需要对待测物的设定测量点(例如,在关键位置处)的高度、膜厚或线宽或对准误差进行检测。然而在对特定待测点进行检测过程中,需要对待测点进行精确定位,以保证检测的精度。
3、现有技术中,采用模板匹配的方式获取所采集到的图像中待测目标的匹配区域,但存在模板匹配鲁邦性差的问题,导致检测准确性较低的问题。
技术实现思路
1、本发明解决的问题是提供一种定位方法、转换关系的获取方法、检测方法及系统,以提高模板匹配的鲁棒性,进而提高待测目标定位的精度。
2、为解决上述问题,本发明提供一种定位方法,包括:
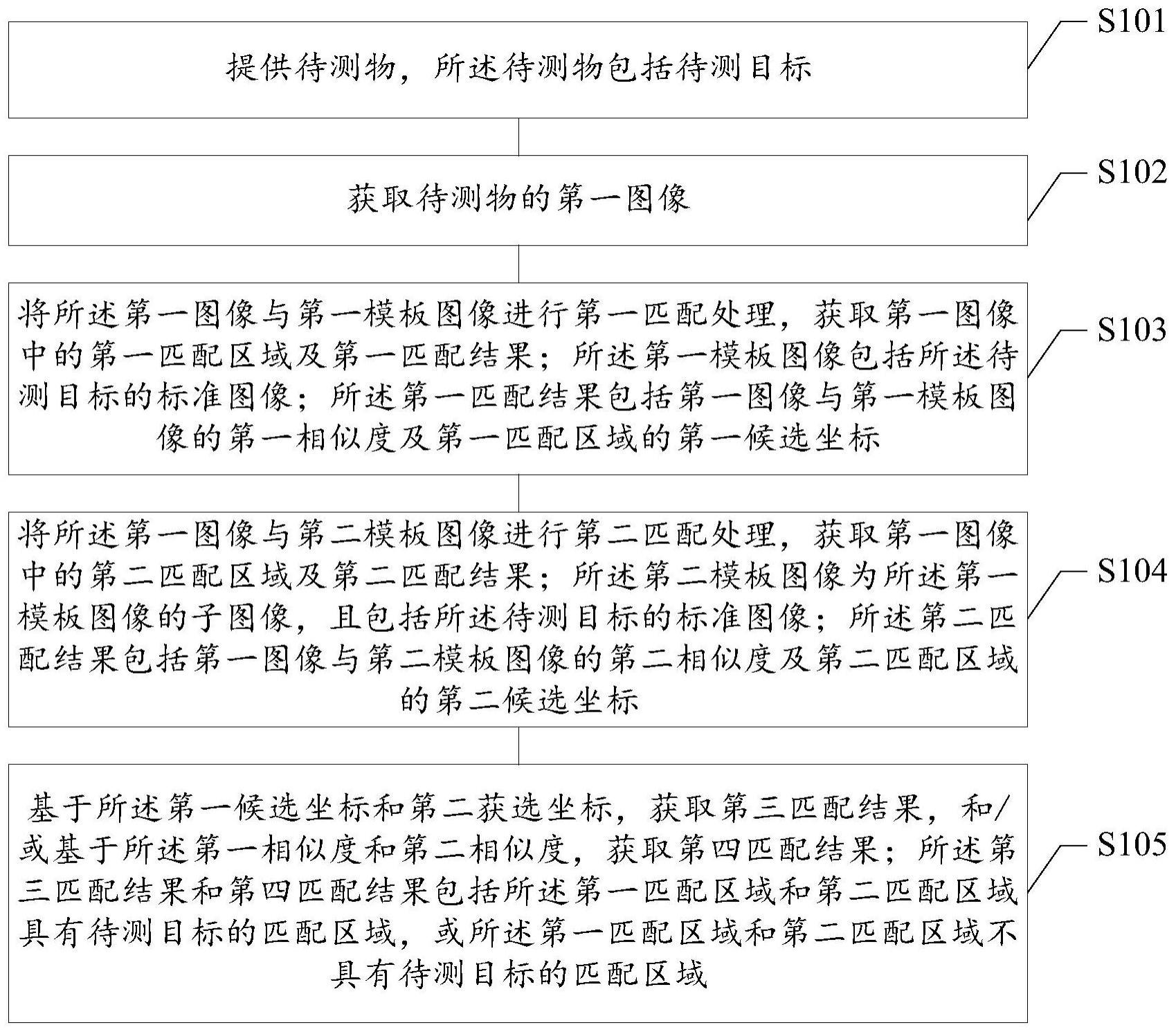
3、提供待测物,所述待测物包括待测目标;
4、获取待测物的第一图像;
5、将所述第一图像与第一模板图像进行第一匹配处理,获取第一图像中的第一匹配区域及第一匹配结果;所述第一模板图像包括所述待测目标的标准图像;所述第一匹配结果包括第一图像与第一模板图像的第一相似度及第一匹配区域的第一候选坐标;
6、将所述第一图像与第二模板图像进行第二匹配处理,获取第一图像中的第二匹配区域及第二匹配结果;所述第二模板图像为所述第一模板图像的子图像,且包括所述待测目标的标准图像;所述第二匹配结果包括第一图像与第二模板图像的第二相似度及第二匹配区域的第二候选坐标;
7、基于所述第一候选坐标和第二获选坐标,获取第三匹配结果,和/或基于所述第一相似度和第二相似度,获取第四匹配结果;所述第三匹配结果和第四匹配结果包括所述第一匹配区域和第二匹配区域具有待测目标的匹配区域,或所述第一匹配区域和第二匹配区域不具有待测目标的匹配区域。
8、可选地,所述将所述第一图像与第一模板图像进行第一匹配处理,获取第一图像中的第一匹配区域及第一匹配结果,包括:
9、采用与所述第一模板图像具有相同尺寸的第一匹配窗口对所述第一图像进行遍历,获取所述第一图像中第一匹配窗口所在区域与所述第一模板图像之间的第一相关性得分;所述第一相关性得分与所述第一匹配窗口和第一模板图像的各像素点灰度的方差负相关;
10、获取所述第一图像中所述第一相关性得分的最大值对应的第一匹配窗口所在区域作为所述第一匹配区域,并获取所述第一匹配区域的第一候选坐标,将所述第一相关性得分的最大值作为所述第一图像与所述第一模板图像之间的第一相似度;
11、所述将所述第一图像与第二模板图像进行第二匹配处理,获取第一图像中的第二匹配区域及第二匹配结果,包括:
12、采用与所述第二模板图像具有相同尺寸的第二匹配窗口对所述第一图像进行遍历,获取所述第一图像中第二匹配窗口所在区域与所述第二模板图像之间的第二相关性得分;所述第二相关性得分与所述第二匹配窗口和第二模板图像的各像素点灰度的方差负相关;
13、获取所述第一图像中第二相关性得分的最大值对应的第二匹配窗口所在区域作为所述第二匹配区域,并获取所述第二匹配区域的第二候选坐标,将所述第二相关性得分的最大值作为所述第一图像与所述第二模板图像之间的第二相似度。
14、可选地,所述获取所述第一图像中所述第一相关性得分或获取所述第一图像中所述第二相关性得分,包括:通过互相关处理获取所述第一相关性得分或第二相关性得分。
15、可选地,所述通过互相关处理获取所述第一相关性得分或第二相关性得分包括:
16、或
17、
18、其中,ncc(p,d)表示所述第一相关性得分或者所述第二相关性得分,i1(x,y)表示所述第一模板图像或者所述第二模板图像中像素点(x,y)处的灰度值,表示所述第一模板图像或者所述第二模板图像中像素点的灰度均值,i2(x+p,y+d)表示第一图像中像素点(x+p,y+d)处的灰度值,表示第一图像中像素点的灰度均值,wp表示第一图像中第一匹配窗口所在区域或第一图像中第二匹配窗口所在区域,·表示乘积运算。
19、可选地,所述第一模板图像与所述第二模板图像共中心,且所述待测目标的标准图像分别位于所述第一模板图像和所述第二模板图像的中心区域;
20、所述获取所述第一匹配区域的第一候选坐标,包括:获取所述第一匹配区域的中心点的第一中心点候选坐标;
21、所述获取所述第二匹配区域的第二候选坐标,包括:获取所述第二匹配区域的中心点的第二中心点候选坐标;
22、所述基于所述第一候选坐标和第二获选坐标,获取第三匹配结果,包括:
23、判断所述第一中心点候选坐标与所述第二中心点候选坐标之间的偏差是否小于或等于预设的偏差阈值;
24、若所述第一中心点候选坐标与所述第二中心点候选坐标之间的偏差小于或等于所述偏差阈值,将所述第一中心点候选坐标或所述第二中心点候选坐标,作为所述待测目标的中心点的第一中心点目标坐标。
25、可选地,若所述第一中心点候选坐标与所述第二中心点候选坐标之间的偏差大于所述偏差阈值,所述基于所述第一候选坐标和第二获选坐标,获取第三匹配结果,还包括:
26、所述第一匹配区域和第二匹配区域不具有待测目标的匹配区域,或根据所述第一相似度和第二相似度获取第四匹配结果。
27、可选地,所述第一模板图像与所述第二模板图像共中心,且所述待测目标的标准图像分别位于所述第一模板图像和所述第二模板图像的中心区域;
28、所述获取所述第一匹配区域的第一候选坐标,包括:获取所述第一匹配区域的中心点的第一中心点候选坐标;
29、所述获取所述第二匹配区域的第二候选坐标,包括:获取所述第二匹配区域的中心点的第二中心点候选坐标;
30、所述根据所述第一相似度和第二相似度获取第四匹配结果,包括:
31、若第一相似度大于第一相似度阈值且第二相似度小于或等于第二相似度阈值,将所述第一中心点候选坐标作为所述待测目标的中心点在第一坐标系下的第一中心点目标坐标;
32、若第一相似度小于或等于所述第一相似度阈值且第二相似度大于所述第二相似度阈值,将所述第二中心点候选坐标作为所述待测目标的中心点在第一坐标系下的第一中心点目标坐标;
33、若第一相似度小于或等于第一相似度阈值且第二相似度小于或等于第二相似度阈值,则所述第一匹配区域和第二匹配区域不具有待测目标的匹配区域。
34、可选地,所述第一相似度阈值大于所述第二相似度阈值。
35、可选地,所述第一相似度阈值的范围为[0.9,1],所述第二相似度阈值的范围为[0.7,0.95]。
36、可选地,所述第一图像中的像素点具有第一坐标系下的位置坐标,所述待测物具有第二坐标系;
37、所述获取待测物的第一图像,包括:获取待测目标的中心点的参考位置坐标;所述参考位置坐标为假定所述第一坐标系与所述第二坐标系相重合的前提下,待测目标的中心点在所述第一坐标系下的位置坐标;以所述参考位置坐标为中心,获取所述待测物相应表面区域的图像,作为所述第一图像;
38、所述获取所述第一匹配区域的中心点的第一中心点候选坐标,包括:获取所述第一匹配区域的中心点在所述第一坐标系下的第一中心点候选坐标与所述参考位置坐标之间的第一偏移矢量;将所述参考位置坐标与所述第一偏移矢量相加,获取所述第一匹配区域的中心点在所述第一坐标系下的第二中心点候选坐标;
39、所述获取第二匹配区域的中心点的第二中心点候选坐标,包括:获取第二匹配区域的中心点在所述第一坐标系下的第二中心点候选坐标与所述参考位置坐标之间的第二偏移矢量;将所述参考位置坐标与所述第二偏移矢量相加,获取第二匹配区域的中心点在所述第一坐标系下的第二中心点候选坐标。
40、可选地,所述第一模板图像为矩形,且所述第一模板图像的边长为150um-250um;所述第二模板图像为矩形,且所述第二模板图像边长尺寸为50um-110um。
41、可选地,若所述第一匹配区域和第二匹配区域不具有待测目标的匹配区域,所述方法还包括:
42、对所述待测物进行区域移动处理,并重新执行所述获取待测物的第一图像的步骤;其中,所述区域移动处理前后所获取的第一图像中所述待测物的表面区域部分重叠或相衔接。
43、相应地,本发明实施例还提供了一种转换关系的获取方法,包括:
44、采用如上述任一项所述的定位方法沿第一方向获取所述待测物中至少相邻的两个待测目标在所述第一坐标系下的第一目标坐标信息;所述待测物具有第二坐标系,所述第一方向为所述第一坐标系的坐标轴方向;
45、基于至少相邻的两个待测目标在所述第一坐标系下的第一目标坐标信息,获取所述第二坐标系与所述第一坐标系之间的转换关系。
46、可选地,所述第一坐标系与所述第二坐标系之间的转换关系包括所述第一坐标系与所述第二坐标系之间的旋转关系;所述获取所述第一坐标系与所述第二坐标系之间的转换关系,包括:
47、获取至少相邻的两个待测目标的中心点在所述第一坐标系下的第一中心点目标坐标信息;
48、对至少相邻的两个待测目标的中心点在所述第一坐标系下的第一中心点目标坐标进行拟合,获取对应的第一连线;
49、计算所述第一连线与所述第一方向之间的旋转角度,作为所述第一坐标系与所述第二坐标系之间的旋转关系。
50、可选地,所述至少相邻的两个待测目标位于所述待测物的中心点附近。
51、相应地,本发明实施例还提供了一种检测方法,包括:
52、提供目标检测设备,所述目标检测设备具有第三坐标系;
53、采用如上述任一项所述的转换关系的获取方法获取所述第一坐标系和第二坐标系之间的转换关系;所述待测物表面具有待测区,所述待测区在所述第一坐标系下具有第一坐标信息;
54、根据所述第一坐标系和第二坐标系之间的转换关系和所述第一坐标信息,获取所述待测区在第二坐标系下的第二坐标信息;
55、获取所述第二坐标系与所述第三坐标系之间的转换关系;
56、根据所述第二坐标系和第三坐标系之间的转换关系和所述第二坐标信息,获取所述待测区在所述第三坐标系下的第三坐标信息;
57、使所述目标检测设备根据所述第三坐标信息对所述待测区进行定位;
58、使所述目标检测设备根据所述第三坐标信息对所述待测区进行定位之后,通过所述目标检测设备对所述待测区进行检测,获取所述待测区的物理信息。
59、相应地,本发明实施例还提供了一种检测系统,包括:
60、第一转换关系获取模块,适于采用如上述任一项所述的转换关系的获取方法获取所述第一坐标系和第二坐标系之间的转换关系;所述待测物表面具有待测区,所述待测区在所述第一坐标系下具有第一坐标信息;
61、第二坐标获取模块,适于根据所述第一坐标系和第二坐标系之间的转换关系和所述第一目标坐标信息,获取所述待测区在第二坐标系下的第二目标坐标信息;
62、第二转换关系获取模块,适于获取第三坐标系与所述第二坐标系之间的转换关系;
63、第三坐标获取模块,适于根据所述第三坐标系与所述第二坐标系之间的转换关系和所述第二目标坐标信息,获取所述待测区在所述第三坐标系下的第三目标坐标信息;
64、目标检测设备,具有所述第三坐标系,适于根据所述第三坐标信息对所述待测区进行定位,并对所述待测区进行检测,获取所述待测区的物理信息。。
65、与现有技术相比,本发明的技术方案具有以下优点:
66、本发明实施例中的定位方法中,第一模板图像与第二模板图像均包括待测目标的标准图像,且第二模板图像为第一模板图像的子图像,将所获取的待测物的第一图像与分别与第一模板图像和第二模板图像进行第一匹配处理和第二匹配处理,获取第一图像中的第一匹配区域和第一匹配结果,以及第一图像中的第二匹配区域及第二匹配结果,并综合考虑第一匹配区域和第一匹配结果和第二匹配区域及第二匹配结果获取第三匹配结果和/或第四匹配结果,与采用单一的模板图像进行匹配处理相比,可以提高模板匹配的鲁棒性和匹配结果的可信度,从而可以提高待测目标定位的精度。
- 还没有人留言评论。精彩留言会获得点赞!