一种基于三维实景建模技术的工业企业用地调查方法与流程
1.本发明涉及工业用地调查技术领域,尤其涉及一种基于三维实景建模技术的工业企业用地调查方法。
背景技术:
2.工业企业用地是实体经济各项生产活动和实体经济健康运行的重要载体,工业企业用地的精准高效配置是护航实体经济,保障产业链、供应链安全稳定,创造高质量工业发展空间的重要途径之一。
3.工业企业用地调查主要包括前期准备、外业调查、数据库建库、成果编制、成果验收等环节。外业调查主要包括问题图形核查、企业位置核实、属性补充调查、属性核查、现场拍照等。传统的现场人工勘验建筑状况、人工采集建筑相关信息的方式需要大量的人力、物力,且效率较低,难以满足海量数据、快速采集、成果可视的需求。随着倾斜航空摄测量技术和三维实景建模技术的发展,为工业企业用地调查提供了快速、便捷的手段,为企业在该类项目降低成本、提高效率提供了可能,而在摄影信息获取过程中相机的角度容易受到风向及其他外部环境的影响而出现偏移的情况,降低了后期三维建模的质量。
4.为此,我们提出一种基于三维实景建模技术的工业企业用地调查方法来解决上述问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于三维实景建模技术的工业企业用地调查方法。
6.为了实现上述目的,本发明采用了如下技术方案:一种基于三维实景建模技术的工业企业用地调查方法,包括以下步骤:
7.s1、进行前期准备工作、编写调查文档以及对无人机航飞进行准备工作;
8.s2、影像数据获取:包括带状倾斜航空摄影数据获取和环状倾斜航空摄影数据获取;
9.s3、影像数据处理和三维建模:航摄数据采用软件进行处理,其处理的倾斜航空摄影影像与立体环形航摄影像带有坐标信息,利用软件进行二者的混合空中三角测量加密,并对影像的外方位元素进行优化;
10.s4、三维实景模型数据进行房地测量和权属信息调查:通过三维实景模型在室内进行房屋四至、房屋要素的采集;权属信息调查用于将收集的权属信息进行标准化处理、完善和核实房屋的权属信息。
11.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述步骤s1中前期准备工作包括:宗地、房屋和权属数据收集;编写调查文档包括实施计划、技术路线和作业标准;无人机航飞准备工作包括:情况分析、设备配置和人员配置。
12.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述步骤s2中带状
倾斜航空摄影数据获取的步骤包括:
13.1)利用无人机飞控系统控制数码相机镜头角度,按照垂直向下、前视30
°
、后视30
°
、左侧视30
°
和右侧视30
°
5个方向分别获取航空影像数据;
14.2)上述获取的数据形成目标调查区带状倾斜摄影测量数据,工作包括航线设计、航空摄影、航摄数据质量检查。
15.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述步骤s2中无人机环状影像数据获取的步骤包括:
16.1)利用无人机对目标调查区内结构复杂的主体建筑进行环绕式拍摄,从目标周围均匀采集建筑影像;
17.2)综合考虑厂址环境因素,设计合理的环绕路线;
18.3)利用无人飞行器平台,搭载数码相机,获取目标调查区环拍影像数据。
19.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述步骤s3在对影像的外方位元素优化后采用密集匹配工具对两组数据进行处理,制作目标调查区的高精度三维模型,同时进行模型的纹理映射,生成目标调查区的实景三维模型数据和正射影像、建筑立面的正射影像以及数字化矢量成果。
20.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述步骤s4中在权属信息调查的基础上增补其他属性信息并形成工业企业用地调查数据库。
21.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述步骤s2中用到的无人机包括:
22.机体结构,其包括纵向排布的第一矩形架和第二矩形架,所述第一矩形架和第二矩形架之间通过多根竖直的第一竖杆连接,且第一竖杆的外侧壁上连接有飞行组件;所述第一矩形架和第二矩形架之间中部接触连接有矩形罩体,所述第二矩形架的下端固定连接有水平的底板,所述底板的下端固定连接有两个u形支脚,且u形支脚的下端固定连接有与地面接触的支撑横板;
23.摄像结构,其包括固定连接在底板下端的梯形壳体,所述梯形壳体的侧壁上开设有矩形槽,所述矩形槽内设置有用于采集影像的摄像组件,所述梯形壳体的下端设置有与摄像组件对应的角度精准组件。
24.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述飞行组件包括套接在第一竖杆上下两端的弯折件,且弯折件两侧的第一竖杆外均螺纹套接有第一螺母,两个所述弯折件远离第一竖杆的一端贯穿连接有第二竖杆,且弯折件两侧的第二竖杆外套接有同一个v字形支架,所述第二竖杆的外侧螺纹套接有用于固定v字形支架的第二螺母,所述v字形支架的槽口与第二竖杆相对设置,所述v字形支架远离弯折件的上端转动连接有竖直的转轴,所述转轴的外侧套接有一字型叶片,所述v字形支架的上端设置有用于驱动转轴的电动马达。
25.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述摄像组件包括转动连接在矩形槽内壁上的横轴,所述横轴的外侧固定套接有套筒,所述套筒的侧壁上固定连接有水平的t形板,所述t形板的外侧滑动套接有活动罩,所述活动罩远离t形板的侧壁上固定连接有数码相机。
26.在上述的基于三维实景建模技术的工业企业用地调查方法中,所述角度精准组件
包括开设在梯形壳体侧壁上的矩形开口,所述矩形开口对应设置于矩形槽的后侧,所述矩形开口内底壁上固定连接有安装块,所述安装块两侧均阻尼转动连接有l形支杆,两个所述l形支杆的下端延伸至矩形槽的下侧,且两个l形支杆之间固定连接有30
°
倾角的校准板,所述校准板的上端固定连接有红外线接收器,所述数码相机的下端固定连接有与红外线接收器对应的红外线发射器,所述矩形罩体内固定连接有电动推杆,所述电动推杆的伸缩端延伸至矩形槽内并通过连接件与数码相机的上端面固定连接,所述电动推杆调节数码相机与校准板平行时红外线发射器与红外线接收器相对并起到校准数码相机角度的作用。
27.与现有技术相比,本基于三维实景建模技术的工业企业用地调查方法的优点在于:
28.1、本发明采用倾斜摄影测量技术,拍摄建筑物时几乎无死角,可快速、全面获取大范围内房地信息,大大提高了工业企业用地调查精度和作业效率,相对于正射影像,倾斜影像能让用户从多个角度观察地物,更加真实的反映地物的实际情况,极大的弥补了基于正射影像应用的不足。
29.2、针对工业用地大场景与重要建筑物的实景三维模型需要不同精细程度的模型的难题,本发明对无人机倾斜摄影设计方案进行了优化,采用带状倾斜航空摄影+环状倾斜航空摄影的技术方案,得到目标调查区的航摄数据,最后融合两种影像数据生成目标调查区的实景三维模型数据;
30.3、本发明通过角度精准组件的使用能够保证数码相机镜头角度精准定位在30
°
的位置,进而保证摄影数据的精准获取,有助于提高后续高精度模型建立的质量。
附图说明
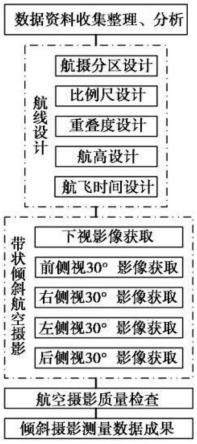
31.图1为本发明提出的一种基于三维实景建模技术的工业企业用地调查方法的无人机倾斜摄影技术路线框图;
32.图2为本发明提出的一种基于三维实景建模技术的工业企业用地调查方法的三维建模技术框图;
33.图3为本发明提出的一种基于三维实景建模技术的工业企业用地调查方法的无人机外部结构示意图;
34.图4为本发明提出的一种基于三维实景建模技术的工业企业用地调查方法的无人机仰视结构示意图;
35.图5为本发明提出的一种基于三维实景建模技术的工业企业用地调查方法的无人机侧面结构示意图;
36.图6为本发明提出的一种基于三维实景建模技术的工业企业用地调查方法的无人机矩形罩体内部剖视结构图;
37.图7为图6中a处局部放大图。
38.100机体结构、101第一矩形架、102第二矩形架、103第一竖杆、104矩形罩体、105底板、106u形支脚、107弯折件、108第二竖杆、109v字形支架、110转轴、111一字型叶片、200摄像结构、201梯形壳体、202横轴、203套筒、204t形板、205活动罩、206数码相机、207安装块、208l形支杆、209校准板、210红外接收器、211红外发射器、212电动推杆、213连接件。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
40.参照图1-2,一种基于三维实景建模技术的工业企业用地调查方法,包括以下步骤:
41.s1、进行前期准备工作、编写调查文档以及对无人机航飞进行准备工作;
42.s2、影像数据获取:包括带状倾斜航空摄影数据获取和环状倾斜航空摄影数据获取;
43.s3、影像数据处理和三维建模:航摄数据采用软件进行处理,其处理的倾斜航空摄影影像与立体环形航摄影像带有坐标信息,利用软件进行二者的混合空中三角测量加密,并对影像的外方位元素进行优化;
44.s4、三维实景模型数据进行房地测量和权属信息调查:通过三维实景模型在室内进行房屋四至、房屋要素的采集;权属信息调查用于将收集的权属信息进行标准化处理、完善和核实房屋的权属信息。
45.其中,步骤s1中前期准备工作包括:宗地、房屋和权属数据收集;编写调查文档包括实施计划、技术路线和作业标准;无人机航飞准备工作包括:情况分析、设备配置和人员配置。
46.其中,步骤s2中带状倾斜航空摄影数据获取的步骤包括:
47.1)利用无人机飞控系统控制数码相机镜头角度,按照垂直向下、前视30
°
、后视30
°
、左侧视30
°
和右侧视30
°
5个方向分别获取航空影像数据;
48.2)上述获取的数据形成目标调查区带状倾斜摄影测量数据,工作包括航线设计、航空摄影、航摄数据质量检查;
49.进一步的,步骤s2中无人机环状影像数据获取的步骤包括:
50.1)利用无人机对目标调查区内结构复杂的主体建筑进行环绕式拍摄,从目标周围均匀采集建筑影像;
51.2)综合考虑厂址环境因素,设计合理的环绕路线;
52.3)利用无人飞行器平台,搭载数码相机,获取目标调查区环拍影像数据。
53.其中,步骤s3在对影像的外方位元素优化后采用密集匹配工具对两组数据进行处理,制作目标调查区的高精度三维模型,同时进行模型的纹理映射,生成目标调查区的实景三维模型数据和正射影像、建筑立面的正射影像以及数字化矢量成果,具体的,航摄数据主要采用商用photoscan软件进行处理,该软件处理的过程为现有技术,在此不再赘述。
54.更进一步的,步骤s4中在权属信息调查的基础上增补其他属性信息并形成工业企业用地调查数据库,利用三维实景模型数据进行房地测量和权属信息调查,由于三维实景模型分辨率高且可测量,在室内可以进行房屋四至、房屋要素的采集,大大提高房地测量的效率。权属信息调查一方面是将收集的权属信息进行标准化处理,另一方面是完善和核实房屋的权属信息,在此基础上,增补其他属性信息,形成工业企业用地调查数据库。
55.针对工业用地大场景与重要建筑物的实景三维模型需要不同精细程度的模型的难题,本技术对无人机倾斜摄影设计方案进行了优化(如图1所示),采用带状倾斜航空摄影+环状倾斜航空摄影的技术方案,得到目标调查区的航摄数据,最后融合两种影像数据生成
目标调查区的实景三维模型数据;另外在三维实景模型的基础上,核实工业企业土地使用位置、范围、面积、建筑状况等信息,结合现有权籍调查、企业基本情况、生产经营、上缴税费、用工情况等调查,建立工业用地利用现状成果数据库。
56.其中,参照图3-图7,步骤s2中用到的无人机包括:
57.机体结构100,其包括纵向排布的第一矩形架101和第二矩形架102,第一矩形架101和第二矩形架102之间通过多根竖直的第一竖杆103连接,且第一竖杆103的外侧壁上连接有飞行组件,具体的,飞行组件包括套接在第一竖杆103上下两端的弯折件107,且弯折件107两侧的第一竖杆103外均螺纹套接有第一螺母,两个弯折件107远离第一竖杆103的一端贯穿连接有第二竖杆108,且弯折件107两侧的第二竖杆108外套接有同一个v字形支架109,第二竖杆108的外侧螺纹套接有用于固定v字形支架109的第二螺母,v字形支架109的槽口与第二竖杆108相对设置,v字形支架109远离弯折件107的上端转动连接有竖直的转轴110,转轴110的外侧套接有一字型叶片111,v字形支架109的上端设置有用于驱动转轴110的电动马达,电动马达与外部的控制器电性连接,通过控制器能够对电动马达进行控制并实现对一字型叶片111的启停,进而能够实现无人机的飞行,该控制过程为现有技术,在此不再赘述。
58.进一步的,第一矩形架101和第二矩形架102之间中部接触连接有矩形罩体104,第二矩形架102的下端固定连接有水平的底板105,底板105的下端固定连接有两个u形支脚106,且u形支脚106的下端固定连接有与地面接触的支撑横板,保证无人机与地面接触时的稳定性。
59.摄像结构200,其包括固定连接在底板105下端的梯形壳体201,梯形壳体201的侧壁上开设有矩形槽,矩形槽内设置有用于采集影像的摄像组件,具体的,摄像组件包括转动连接在矩形槽内壁上的横轴202,横轴202的外侧固定套接有套筒203,套筒203的侧壁上固定连接有水平的t形板204,t形板204的外侧滑动套接有活动罩205,活动罩205远离t形板204的侧壁上固定连接有数码相机206,通过数码相机206能够完成步骤s2中带状倾斜航空摄影数据获取。
60.进一步的,梯形壳体201的下端设置有与摄像组件对应的角度精准组件,角度精准组件包括开设在梯形壳体201侧壁上的矩形开口,矩形开口对应设置于矩形槽的后侧,矩形开口内底壁上固定连接有安装块207,安装块207两侧均阻尼转动连接有l形支杆208,两个l形支杆208的下端延伸至矩形槽的下侧,且两个l形支杆208之间固定连接有30
°
倾角的校准板209,校准板209的上端固定连接有红外线接收器210,数码相机206的下端固定连接有与红外线接收器210对应的红外线发射器211,矩形罩体104内固定连接有电动推杆212,电动推杆212的伸缩端延伸至矩形槽内并通过连接件213与数码相机206的上端面固定连接,电动推杆212调节数码相机206与校准板209平行时红外线发射器211与红外线接收器210相对并起到校准数码相机206角度的作用,通过角度精准组件的使用能够保证数码相机镜头角度精准定位在30
°
的位置,进而保证摄影数据的精准获取,有助于提高后续高精度模型建立的质量。
61.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1