一种工程机械车辆分时管控方法及管控系统与流程
1.本发明涉及工程机械无人化技术领域,尤其是涉及一种工程机械车辆分时管控方法及管控系统。
背景技术:
2.冶金是指开采、精选、烧结金属矿石并对其进行冶炼,以加工成金属材料。因其行业的特殊性,工作场景内部作业面上,多为人工驾驶特种工程机械车辆进行冶炼,具体工作包括炉下清渣、煤场归堆、焦化沥青处理和船底清舱等。
3.在此类特殊工况下进行冶炼,危险性较大,同时这类工作的工作环境均存在高粉尘、热辐射、有毒有害气体、强酸强碱腐蚀、视野受限及人身伤害等诸多作业问题。
技术实现要素:
4.有鉴于此,本发明的目的之一在于提供一种工程机械车辆分时管控方法,以解决现有技术在冶金行业中,工作环境存在较多的危险性,导致存在一定程度的人身伤害的技术问题。
5.本发明的目的之二在于提供一种工程机械车辆分时管控系统。
6.为了实现上述目的之一,本发明提供了一种工程机械车辆分时管控方法,所述工程机械车辆作业时为作业车辆,该方法包括获取作业车辆作业时间片任务,基于所述作业时间片任务获取任务状态图,基于所述任务状态图生成作业时序任务,基于所述作业时序任务下发任务到作业舱,基于所述作业舱进行作业统计及监控,基于统计信息可视化显示。
7.根据一种可选实施方式,所述工程机械车辆包括装载机、挖掘机、抓钢机或者推耙机至少之一。
8.根据一种可选实施方式,所述作业时间片任务为实际作业场景中,作业车辆需要达成的工作任务项,其中,所述工作任务项包括工程车辆编号、时间、场景地点、作业对象、作业要求及作业指标。
9.根据一种可选实施方式,所述任务状态图为工作任务项的归集提炼,作为独立实体进行保存。
10.根据一种可选实施方式,所述作业时序任务为多个和/或种所述作业车辆的作业任务统一按照时间片排序,得到作业时序任务序列,所述作业时序任务序列按照二十四小时制切割划分。
11.根据一种可选实施方式,所述作业时序任务序列包括时间戳、作业车辆编号、时间、工作时长、场景地点、作业对象、作业要求及作业指标。
12.根据一种可选实施方式,所述作业舱为通过非视距远程遥控技术,实现操控作业车辆的操作平台,其中,所述作业舱的组成部分有钢架结构、控制机柜、工程机械座椅、模拟驾驶结构、hmi显示屏及对外接口。
13.根据一种可选实施方式,所述作业统计及监控通过作业舱内的计数统计模块实
现,其中,所述计数统计模块为安装在作业车辆上的智能ai运算组件构成,智能ai运算的数据由5g/无线通信链路获取,智能ai运算组件由称重系统、ai计数系统、料堆立方计算单元组成。
14.根据一种可选实施方式,所述可视化显示通过作业舱内的gui显示模块实现,其中,所述gui显示模块包含驾驶视角子模块、工程车身状态子模块、作业任务子模块、物料建模子模块及计数系统子模块。
15.为了实现上述目的之一,本发明提供了一种工程机械车辆分时管控系统,包括:
16.作业任务模块,用于作业任务的录入、排序和输出功能;
17.遥控操作模块,用于为作业任务提供非视距远程遥控驾驶功能;
18.数据监控模块,用于通过数据统计得出每次作业任务的完成度,作业效率及耗时。
19.本发明实施例提供的工程机械车辆分时管控方法,具有以下技术效果:
20.该种工程机械车辆分时管控方法包括获取作业车辆作业时间片任务,基于作业时间片任务获取任务状态图,基于任务状态图生成作业时序任务,基于作业时序任务下发任务到作业舱,基于作业舱进行作业统计及监控,基于统计信息可视化显示。本发明的管控方法解决了非视距远程遥控驾驶时,工程机械车辆分时管控作业下的时序任务分配问题,保证了非视距远程遥控驾驶作业任务执行的有效性,提高了非视距远程遥控驾驶的体验。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
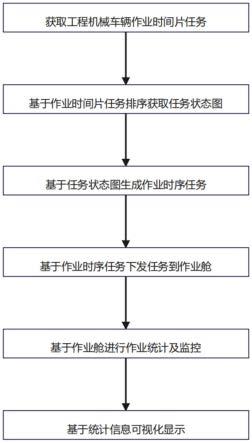
22.图1是本发明一实施例工程机械车辆分时管控方法的流程示意图;
23.图2是本发明一实施例工程机械车辆分时管控系统的示意图;
24.图3是图2中工程机械车辆分时管控系统的e-r图。
25.其中,图1-图3:
26.101、作业任务模块;102、遥控操作模块;103、数据监控模块。
具体实施方式
27.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
28.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
29.在本实施例中提供了一种工程机械车辆分时管控方法,参见图1。
30.该种工程机械车辆分时管控方法包括获取工程机械车辆作业时间片任务;基于作业时间片任务排序获取任务状态图;基于任务状态图生成作业时序任务;基于作业时序任务下发任务到作业舱;基于作业舱进行作业统计及监控;基于统计信息可视化显示。
31.具体的,工程机械车辆在作业时统称为作业车辆,工程机械车辆包括装载机、挖掘机、抓钢机、推耙机等市面所见大工业工程机械车辆,可以是其中一种工程车辆,或者是多种工程车辆,在或者是一种工程车辆的多个。
32.具体的,所述作业时间片任务为实际作业场景中,作业车辆需要达成的工作任务项,其中,所述工作任务项包括工程车辆编号、时间(起止时间)、场景地点、作业对象、作业要求及作业指标(吨位/立方)。
33.具体的,所述任务状态图为工作任务项的归集提炼,作为独立实体进行保存,其中,所述实体泛指能够独立存在的、作为一切属性的基础和万物本原的东西,本实施例的实体代表系统平台针对工作任务项抽象化后的统一表述的概念。
34.具体的,所述作业时序任务为多个(种)工程机械车辆作业任务统一按照时间片排序时,得到作业时序任务序列,其中,作业时序任务序列主要是按照二十四小时制切割划分,确保每个分时作业任务的有效性。
35.具体的,所述作业时序任务序列包括时间戳、工程车辆编号、时间(起止时间)、工作时长、场景地点、作业对象、作业要求及作业指标(吨位/立方、满载/半载/空载)。
36.具体的,所述作业舱为通过非视距远程遥控技术,实现操控工程机械车辆的操作平台,其中,作业舱的组成部分有钢架结构、控制机柜、工程机械座椅、模拟驾驶结构、hmi显示屏及对外接口。
37.具体的,所述作业统计及监控为作业舱内的计数统计模块,其中,所述计数统计模块均为安装在工程机械车辆上的智能ai运算组件构成,智能ai运算的数据由5g/无线通信链路获取。
38.智能ai运算组件由称重系统、ai计数系统、料堆立方计算单元组成。
39.具体的,所述称重系统为安装在工程机械车辆动臂及铲斗液压油缸内部的压力传感器反馈数据,由于是直接通过测量液压油缸内的压力反馈当前载重数据,属于间接测绘及反馈铲斗物料质量,最终通过铲斗次数及铲斗物料累加后得到总作业质量;
40.所述ai计数系统由安装在工程机械车辆驾驶室顶棚前方的摄像头构成,通过摄像头实时统计铲斗铲料的举升状态,累计得到铲斗物料次数。其中,所述摄像头通过提前标定铲斗尺寸及外部形态,根据铲斗装载物料的饱满程度及称重系统的反馈,融合计算出次数及载荷状态;
41.所述料堆立方计算单元由安装在工程机械车辆左/右车大灯处的激光雷达构成,通过激光雷达实时扫描作业面内料堆/物料的3d投影数据,通过5g/无线通信链路反馈到作业舱建立3d模型并根据3d模型建立数字孪生平台,结合称重系统、ai计数系统实时计算料堆立方数据。
42.具体的,所述可视化显示为作业舱内gui显示模块,其中,gui显示模块包含驾驶视角子模块、工程车身状态子模块、作业任务子模块、物料建模子模块及计数系统子模块。
43.在本实施例中还提供了一种工程机械车辆分时管控系统,参见图2和图3。
44.一种工程机械车辆分时管控系统,包括:
45.作业任务模块101,用于作业任务的录入、排序和输出功能;
46.遥控操作模块102,用于为作业任务提供非视距远程遥控驾驶功能;
47.数据监控模块103,用于通过数据统计得出每次作业任务的完成度,作业效率及耗时。
48.具体的,作业任务模块101具有作业任务的录入、排序、输出功能。
49.其中,参见图3,作业任务的录入包含工程车辆编号、时间(起止时间)、场景地点、作业对象、作业要求及作业指标(吨位/立方);作业任务的排序为作业任务项的归集提炼,作为独立实体进行保存,实体一般具有独立性,包含属性和联系,通过实体及关系可以建立实体关系图。
50.作业任务项下发到工程机械车辆,工程机械车辆在作业面上进行装卸工作。
51.作业任务的排序主要是根据作业任务时间(起止时间)进行排序,当排序结束后,每个作业任务会生成一个唯一的时间戳作为作业任务的排序序号,用于作业任务项的归档化处理操作。
52.作业任务的输出主要是根据作业舱进行归类,通过排序输出的结果,进行前后顺序的队列输出,最后得到一个顺序队列,将队列输出下发到指定的作业舱。
53.遥控操作模块102由非视距远程遥控驾驶模块和作业舱构成。
54.其中,非视距远程遥控驾驶模块分别安装在工程机械车辆和作业舱内,工程机械车辆上有视觉单元、车身控制单元、工装反馈单元及无线通信单元;作业舱上有模拟驾驶单元、显示单元及通信单元;遥控操作模块102为作业任务提供了非视距远程遥控驾驶的功能。
55.数据监控模块103由作业统计及监控模块构成,作为作业舱内的计数统计模块,其中,所述计数统计模块为安装在工程机械车辆上的智能ai运算组件构成,智能ai运算的数据由5g/无线通信链路获取。
56.智能ai运算组件由称重单元、ai计数单元、料堆立方计算单元组成。
57.称重单元为安装在工程机械车辆动臂及铲斗液压油缸内部的压力传感器反馈数据,由于是直接通过测量液压油缸内的压力反馈当前载重数据,属于间接测绘及反馈铲斗物料质量,最终通过铲斗次数及铲斗物料累加后得到总作业质量;
58.所述ai计数单元由安装在工程机械车辆驾驶室顶棚前方的摄像头构成,通过摄像头实时统计铲斗铲料的举升状态,累计得到铲斗物料次数,其中,所述摄像头通过提前标定铲斗尺寸及外部形态,根据铲斗装载物料的饱满程度及称重单元的反馈,融合计算出次数及载荷状态;
59.所述料堆立方计算单元由安装在工程机械车辆左/右车大灯处的激光雷达构成,通过激光雷达实时扫描作业面内料堆/物料的3d投影数据,通过5g/无线通信链路反馈到作业舱建立3d模型并根据3d模型建立数字孪生平台,结合称重单元、ai计数单元实时计算料堆立方数据。
60.数据监控模块103通过数据统计得出每次作业任务的完成度,作业效率及耗时。通过统计数据累计,可以不断的正反馈,达到精益生产的目的。同时,借助ai智能测算系统,可以提前预警及作业安全监控。
61.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1