点云数据处理方法、装置、计算机设备及存储介质与流程
本技术涉及数据处理,特别涉及一种点云数据处理方法、装置、计算机设备及存储介质。
背景技术:
1、随着科学技术的快速发展,各种各样的电子设备已经应用在人们的日常生活中,不同的电子设备之间可以传输各种数据。
2、其中,在电子设备中实现的功能越来越多,对于一些电子设备,可以采集并传输获取到的三维点云数据,或者电子设备可以与采集三维点云数据的电子设备通过通信连接,接收到其他电子设备发送的三维点云数据。在这些电子设备中,对三维点云数据特征的提取来说,往往会基于法向量的方式提取。例如,通过法向量可以有效的提取到模型棱角的点云特征,但是也会提取到面上的特征点,在后期进行点云配准时由于存在非公共面上的特征点,因此,基于该方式获取到的点云特征数据中包含面上的特征点,点云特征数据的复杂度更高,容易导致后续配准的精度降低。
技术实现思路
1、本技术实施例提供了一种点云数据处理方法,降低点云特征数据的复杂度,提高后续配准的精度。
2、一个方面,本技术实施例提供了一种点云数据处理方法,所述方法包括:
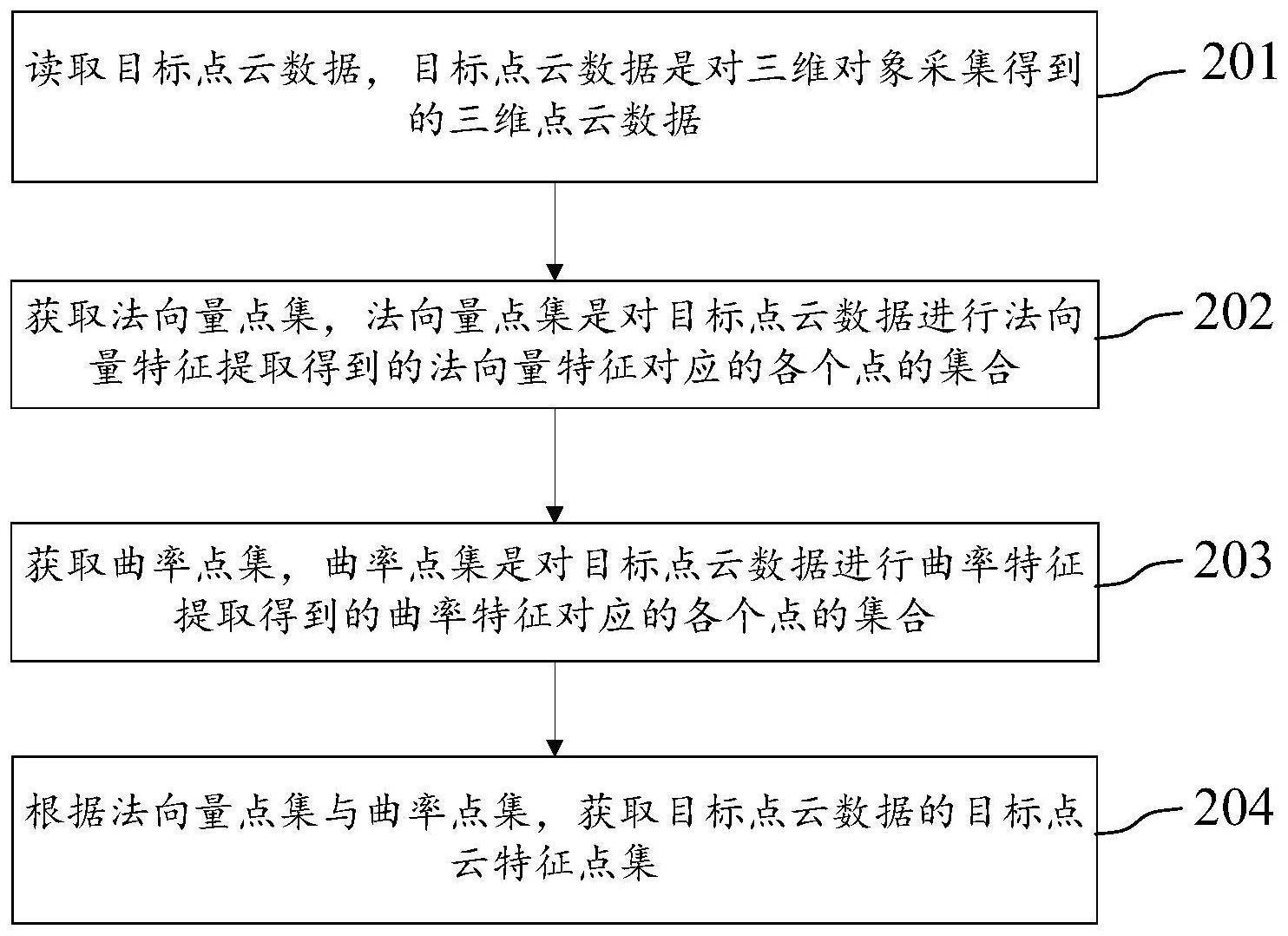
3、读取目标点云数据,所述目标点云数据是对三维对象采集得到的三维点云数据;
4、获取法向量点集,所述法向量点集是对所述目标点云数据进行法向量特征提取得到的法向量特征对应的各个点的集合;
5、获取曲率点集,所述曲率点集是对所述目标点云数据进行曲率特征提取得到的曲率特征对应的各个点的集合;
6、根据所述法向量点集与所述曲率点集,获取所述目标点云数据的目标点云特征点集。
7、作为本技术实施例一种可选的实施方式,所述根据所述法向量点集与所述曲率点集,获取所述目标点云数据的目标点云特征点集,包括:
8、根据所述法向量点集与所述曲率点集,获取交集点集,所述交集点集是所述法向量点集与所述曲率点集之间的交集;
9、根据所述交集点集,获取所述目标点云数据的目标点云特征点集。
10、作为本技术实施例一种可选的实施方式,所述根据所述交集点集,获取所述目标点云数据的目标点云特征点集,包括:
11、根据所述交集点集中各个点各自的曲率特征,计算所述交集点集的平均曲率特征;
12、将所述交集点集中各个点各自的曲率特征中小于所述平均曲率特征对应的各个点,获取为所述目标点云数据的目标点云特征点集。
13、作为本技术实施例一种可选的实施方式,所述获取法向量点集,包括:
14、对所述目标点云数据进行法向量特征提取,获取所述目标点云数据包含的每个点云数据各自的法向量特征;
15、根据所述每个点云数据各自的法向量特征与所述每个点云数据各自的中心点,获取每个点云数据各自对应的中心夹角,所述中心夹角是每个点云数据的邻域点云数据中除所述中心点之外的其他点云数据的法向量与所述邻域点云数据的中心点之间的夹角;
16、将均大于预设角度阈值的各个中心夹角对应的各个点云数据,获取为所述法向量点集。
17、作为本技术实施例一种可选的实施方式,所述获取曲率点集,包括:
18、获取第一搜索值,所述第一搜索值用于进行曲率特征提取过程中以所述第一搜索值为球体半径对所述目标点云数据进行邻域搜索;
19、对所述目标点云数据进行曲率特征提取,获取所述目标点云数据在所述第一搜索值的邻域内的曲率特征;
20、将所述第一搜索值的邻域内的曲率特征对应的各个点云数据获取为所述曲率点集。
21、可选的,所述获取第一搜索值,包括:
22、获取预设的n个待测值,n为大于1的整数;
23、对所述n个待测值分别进行邻域搜索,获取每个待测值对应的邻域点云数据,对所述每个待测值对应的邻域点云数据构建协方差矩阵并进行奇异值分解,获取通过奇异值分解得到所述每个待测值对应的邻域点云数据的特征值,并根据所述每个待测值对应的邻域点云数据的特征值计算所述每个待测值对应的熵值;
24、将每个熵值中的最小熵值对应的待测值获取为所述第一搜索值。
25、可选的,在所述根据所述法向量点集与所述曲率点集,获取所述目标点云数据的目标点云特征点集之后,还包括:
26、根据所述目标点云特征点集以及所述目标点云数据,进行点云配准;
27、获取配准速率以及配准精度;
28、根据所述配准速率以及配准精度,调整所述n个待测值,其中,调整所述n个待测值的幅度与所述配准速率以及配准精度成反比。
29、另一个方面,本技术实施例提供了一种点云数据处理装置,所述装置包括:
30、数据读取模块,用于读取目标点云数据,所述目标点云数据是对三维对象采集得到的三维点云数据;
31、第一获取模块,用于获取法向量点集,所述法向量点集是对所述目标点云数据进行法向量特征提取得到的法向量特征对应的各个点的集合;
32、第二获取模块,用于获取曲率点集,所述曲率点集是对所述目标点云数据进行曲率特征提取得到的曲率特征对应的各个点的集合;
33、第三获取模块,用于根据所述法向量点集与所述曲率点集,获取所述目标点云数据的目标点云特征点集。
34、另一个方面,本技术提供了一种计算机设备,所述计算机设备包含处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现如一个方面所述的点云数据处理方法。
35、另一个方面,本技术提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现如一个方面所述的点云数据处理方法。
36、另一方面,本技术实施例提供了一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行如上述一个方面所述的点云数据处理方法。
37、另一方面,本技术实施例提供了一种应用发布平台,所述应用发布平台用于发布计算机程序产品,其中,当所述计算机程序产品在计算机上运行时,使得所述计算机执行如上述一个方面所述的点云数据处理方法。
38、本技术实施例提供的技术方案可以至少包含如下有益效果:
39、本技术通过读取目标点云数据,目标点云数据是对三维对象采集得到的三维点云数据;获取法向量点集,法向量点集是对目标点云数据进行法向量特征提取得到的法向量特征对应的各个点的集合;获取曲率点集,曲率点集是对目标点云数据进行曲率特征提取得到的曲率特征对应的各个点的集合;根据法向量点集与曲率点集,获取目标点云数据的目标点云特征点集。本技术对目标点云数据除了按照法向量特征提取方式获取法向量点集之外,还利用曲率特征提取方式获取曲率点集,基于法向量点集与曲率点集,来获取所需要的目标点云特征点集,使得到的目标点云特征点集中减少了两种方式获取过程中存在的曲面特征点以及棱角冗余特征点,降低点云特征数据的复杂度,提高后续配准的精度。
- 还没有人留言评论。精彩留言会获得点赞!