一种滚动轴承RUL的预测方法
本发明涉及轴承检测领域,具体地,涉及一种滚动轴承rul的预测方法。
背景技术:
1、在现代工业中,机械设备的rul(剩余使用寿命)预测正逐渐成为确保机械设备最大连续运行时间和使用效率,降低设备维护成本的一项关键技术。现有的机械rul预测方法主要有两大类,即基于模型的方法和数据驱动的方法。基于模型的方法使用第一原理和失效机制对机器的退化过程进行建模,然后使用统计估计技术,如线性最小二乘法、最大似然估计和序列蒙特卡洛,来识别模型参数并预测rul。然而,在现实中,滚动轴承的实际裂纹扩展极不规则,难以建立准确的失效模型。因此,在实际应用中很难建立精确的数学统计或物理退化模型。相反,数据驱动的方法不需要知道机器的显式失效机制,它能够自动推断隐藏在数据中的因果关系。
2、近年来,深度学习在数据驱动的rul预测中越来越受欢迎。深度学习与传统的机器学习技术相比,深度学习具有更强大的表示学习能力,能够从原始数据中自动学习多级表示。因此,在深度学习技术的帮助下,可以直接基于原始传感器数据建立预测模型,从而摆脱了人工特征提取的复杂过程。时间序列建模大多数都是通过循环神经网络(recurrentneural network,rnn)来实现,其中长短期记忆(long short-term memory,lstm)网络是最受欢迎的,因为它能够解决以前rnn梯度爆炸和消失梯度的问题。但是,lstm也存在着局限性,即lstm是链式结构,因此不能实现并行操作,从而导致运行速度慢。相比之下,卷积神经网络(convolutional neural network,cnn)能够并行处理数据,计算更加高效。
3、cnn的层级结构与循环网络的链式结构相比,层级结构提供了一种较短的路径来捕获各时间步之间远程的依赖关系,因此也可以很好地捕捉复杂的关系。一些结果表明,简单的卷积结构在效率和准确性上都优于lstm等规范rnn。然而,cnn具有两点劣势:1)传统cnn的设计不能灵活地适应各种时间窗口大小;2)cnn要具有相应的深层结构才能获得足够的感受野,而网络太深时容易出现梯度消失。
4、现有技术cn202210429223.4公开了一种基于模型迁移和维纳过程的滚动轴承rul预测方法,其特征在于,包括以下步骤:获取工况a下全寿命滚动轴承时域振动信号作为源域数据,工况b下全寿命滚动轴承时域振动信号作为目标域数据;将源域数据和目标域数据均输入基于单层非负约束自编码器网络和自组织特征映射网络的健康指标模型中,分别获取源域数据的健康指标标签和目标域数据的健康指标标签;对所述源域数据和所述目标域数据进行预处理;将预处理后的源域数据和源域数据的健康指标标签结合输入基于深度非负约束自编码器网络和前馈神经网络的源域预训练模型中进行训练,获取源域预训练模型参数;所述源域预训练模型参数包括权重参数;将源域预训练模型参数迁移至基于深度非负约束自编码器网络和前馈神经网络的目标域网络,作为初始网络参数;并将预处理后的目标域数据和目标域数据的健康指标标签结合输入基于深度非负约束自编码器网络和前馈神经网络的目标域网络进行微调训练,获取滚动轴承性能退化模型;将经过预处理后的待预测非全寿无标签滚动轴承时域振动信号输入所述滚动轴承性能退化模型,获取轴承性能退化指标;根据服从维纳过程的轴承性能退化指标计算其增量,增量服从正态分布,从而获取所述正态分布的均值和标准差;
5、将所述均值和标准差输入基于维纳过程构建的数学模型中,获取待预测非全寿无标签滚动轴承的剩余使用寿命。
6、现有技术利用快速傅里叶变换获取不同工况下轴承的频域幅值序列;提取某工况下全寿命滚动轴承的各振动统计特征,再利用单层非负约束自编码器(ncae)与自组织特征映射网络(som)构建健康指标,使用该指标对频域幅值序列进行标记,将标记后的频域幅值序列作为源域数据,同理,处理其他工况下的全寿命滚动轴承振动信号并作为目标域数据;使用源域数据训练结合深度ncae网络与前馈神经网络(fnn)的组合网络,得到预训练模型;利用目标域数据微调,得到滚动轴承性能退化模型,利用性能退化指标量化值的增量建立维纳过程模型,实现不同工况下滚动轴承的rul预测。
技术实现思路
1、本发明解决的技术问题在于克服现有技术的缺陷,提供一种全新的滚动轴承rul的预测方法。
2、本发明的目的通过以下技术方案实现:
3、一种滚动轴承rul的预测方法,包括以下步骤:
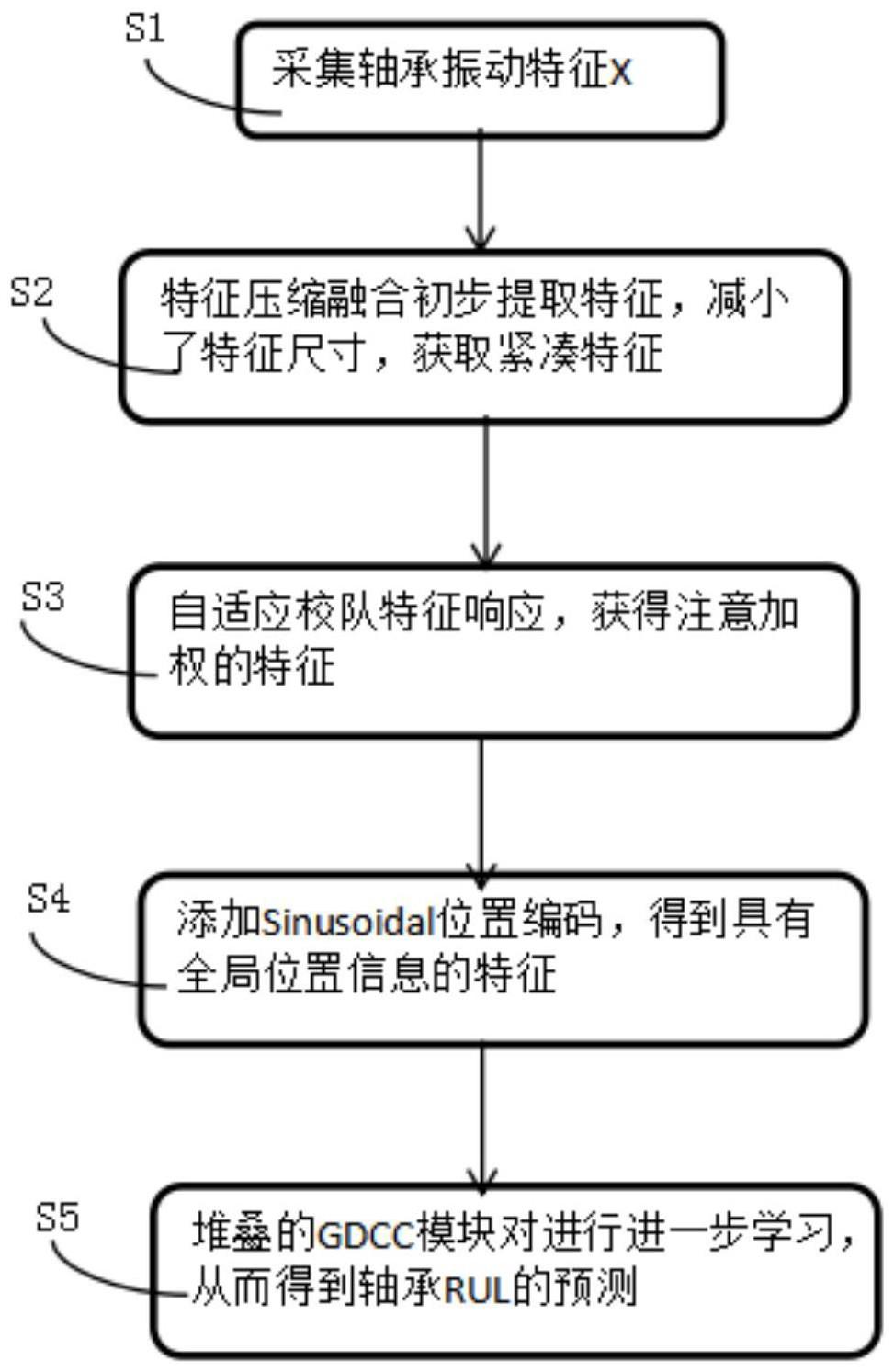
4、s1:采集轴承振动特征x;
5、s2:特征压缩融合初步提取特征,减小了特征尺寸,获取紧凑特征xf;
6、s3:自适应校队特征响应xf,获得注意加权的特征x′f;
7、s4:对x′f添加sinusoidal位置编码,得到具有全局位置信息的特征xpe;
8、s5:堆叠的gdcc模块对xpe进行进一步学习,从而得到轴承rul的预测。
9、优选地,所述检测方法还包括步骤s6,所述步骤s6包括:梯度下降算法更新网络权重wnetwork,直到迭代终止,算法结束。
10、优选地,所述步骤s6还通过adam优化器训练网络,并保留训练过程中的最佳权重wnetwork。
11、优选地,所述步骤s3通过两次细化输入特征,精确注意有效变量和对不相关杂波的降噪,从而有效地帮助信息在网络中流动。
12、优选地,所述步骤s3包括以下步骤:
13、s30:计算每个时间步下,特征变量调制权值的集合α1,f,
14、s31:计算聚合总时间步下,特征图调制权值的集合α2,f,
15、s32:计将权重α1,f,α2,f和xf融合,求取x′f。
16、优选地,所述α1,f的计算方法为:
17、s1,f=f1,n/2*xf
18、e1,f=f1,n*δ(bn(s1,f))
19、α1,f=σ(e1,f)
20、所述α2,f的计算方法为:
21、s2,f=f2,n/2*m(xf)
22、e2,f=f2,n*δ(bn(s2,f))
23、α2,f=σ(e2,f)
24、所述x′f的计算方法为:
25、x′f=xf×α1,f×α2,f
26、式中:n为上一个卷积层的卷积核个数;卷积核f1,n/2,f1,n用来显示地建模各时间步下特征变量间的相关性;δ和σ表示relu和sigmoid激活函数;m为平均池化;bn表示批量归一化;卷积核f2,n/2,f2,n用来显示地建模全局分布下通道间的相关性。
27、优选地,所述步骤s4包括以下步骤:
28、s40:计算位置向量pe;
29、s41:利用sinusoidal位置编码模块求取xpe。
30、优选地,所述位置向量pe的计算方法为:
31、
32、式中:pos∈(0,tf-1)之间的整数,tf为x′f的总时间步长;dm是位置向量的维度,与x′f维度值相同;i∈(0,dm/2-1)之间的整数值。
33、所述xpe的计算方法为:
34、xpe=x′f+pe
35、优选地,所述步骤s5中,首先在gdcc模块中输入sinusoidal位置编码模块输出的xpe,然后输出rul的预测值rulpre。
36、优选地,步骤s5包括以下步骤:
37、s50:xpe依次经过三个膨胀因子d不断增大的gdcc模块,提取深层特征xdeep;
38、s51:压缩xdeep特征图,得到最终预测特征xpre;
39、s52:使用relu函数处理xpre,输出
40、与现有技术相比,本发明具有以下有益效果:
41、本技术通过一种新的端到端深度预测网络--基于多特征压缩激励单元(multi-feature squeeze excitation unit,mseu)和sinusoidal位置编码的门控膨胀因果卷积网络,gdcc模块通过膨胀因子灵活地适应各种时间窗口大小,而堆叠的gdcc模块既可以获得足够的感受野,又不容易发生梯度消失。mseu从两种不同的角度校对多特征变量,有效识别特征压缩融合后特征之间的差异。嵌入在网络中的sinusoidal位置编码使神经网络获得相隔较远时间步之间的信息,从而实现了对轴承rul的精准预测。
- 还没有人留言评论。精彩留言会获得点赞!