基于人工智能的城市管理方法及系统与流程
本公开涉及人工智能,尤其涉及一种基于人工智能的城市管理方法及系统。
背景技术:
1、随着社会经济的快速发展以及城市化进程的快速推进, 城市发展面临道路交通压力逐年增大、交通拥挤与堵塞现象日趋严重的困局,如何解决交通拥堵问题成了智慧城市建设中的一道难题,基于智慧城市建设中的数据挖掘和人工智能深度学习,以海量交通数据为基础,可以分析道路交通运行的规律性和相似性,建立智能学习模型,通过机器学习去预 测流量、拥堵等多项交通参数。
2、在智慧城市交通建设中,用采集收集到的交通数据前瞻性地预测未来短期交通流量变化,能高效提升城市道路的利用率,智能化缓解城市拥堵,交通出行更轻松。目前统计方法模型、单独机器学习模型和深度学习模型是短时交通流量预测方法经常采用的三类方法。目前的方法主要存在如下问题:
3、传统路径规划策略具有诱导局限性。以导航系统为例的路径规划策略主 要以实时路网状态进行路径规划,且现实应用中驾驶员得到的信息实际为 3~5min前的道路状态,由于交通系统是一个复杂多用户系统且具有强时空依赖性的特点,对于空间依赖性上,相距较远的道路交通状态可以通过传递效应相互影响;对于时间依赖性上,交通流量随着周期和出行趋势随时间动态变化,例如周末的出行量相比工作日在全天更加均衡,而工作日则会出现早晚通勤高峰现象,判断未来路况实际仍然不准确。
技术实现思路
1、本公开实施例提供一种基于人工智能的城市管理方法及系统,能够解决现有技术对于交通流量预测不准以及道路规划不够合理的问题。
2、本公开实施例的第一方面,
3、提供一种基于人工智能的城市管理方法,包括:
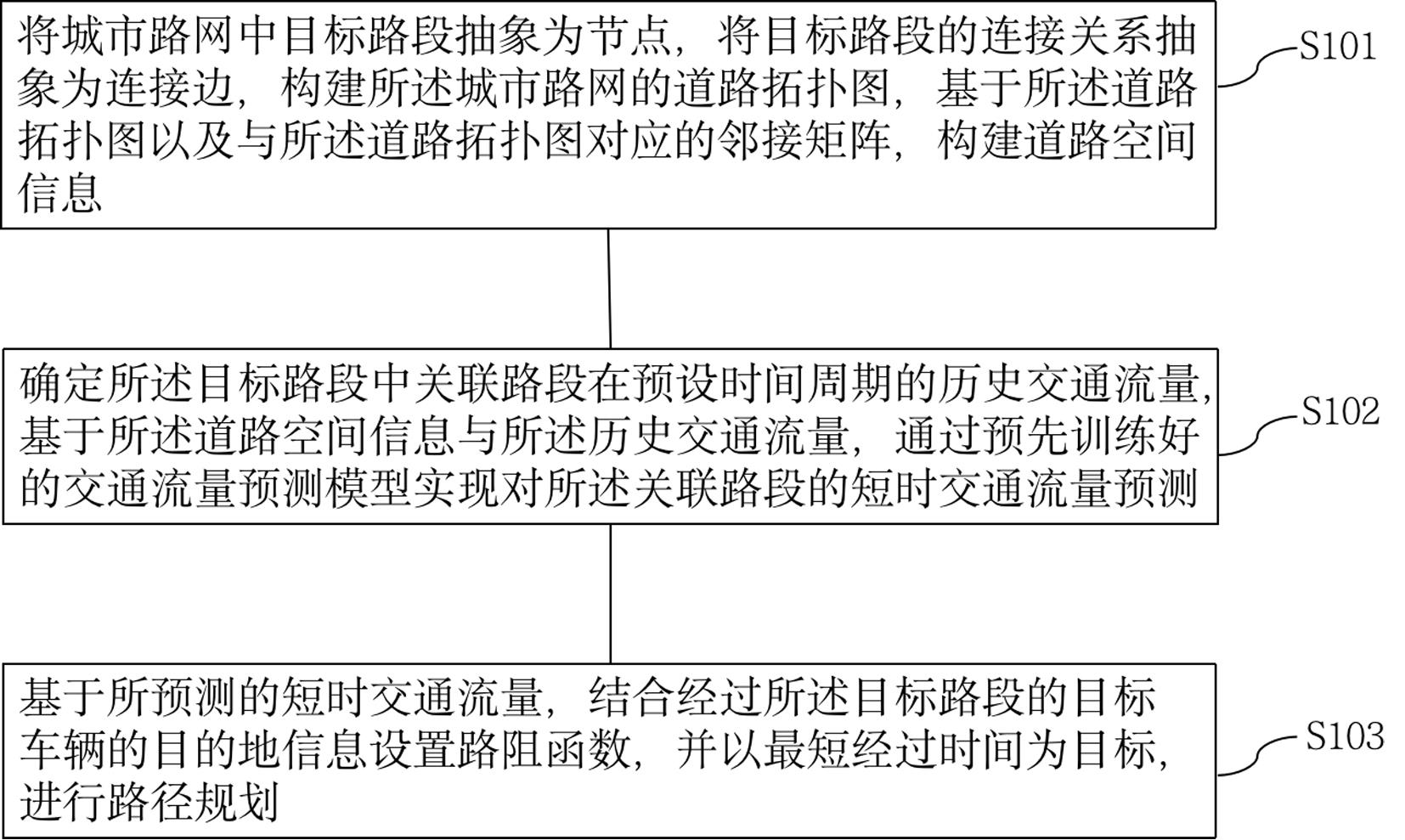
4、将城市路网中目标路段抽象为节点,将目标路段的连接关系抽象为连接边,构建所述城市路网的道路拓扑图,基于所述道路拓扑图以及与所述道路拓扑图对应的邻接矩阵,构建道路空间信息;
5、确定所述目标路段中关联路段在预设时间周期的历史交通流量,基于所述道路空间信息与所述历史交通流量,通过预先训练好的交通流量预测模型实现对所述关联路段的短时交通流量预测,其中,所述关联路段用于指示所述目标路段中关联度大于预设关联阈值的两个路段;
6、基于所预测的短时交通流量,结合经过所述目标路段的目标车辆的目的地信息设置路阻函数,并以最短经过时间为目标,进行路径规划。
7、在一种可选的实施方式中,
8、所述交通流量预测模型包括第一特征提取模块和第二特征提取模块,
9、所述基于所述道路空间信息与所述历史交通流量,通过预先训练好的交通流量预测模型实现对所述关联路段的短时交通流量预测包括:
10、通过所述第一特征提取模块提取所述历史交通流量对应的第一特征信息,通过所述第二特征提取模块提取所述道路空间信息对应的第二特征信息;
11、将所述第一特征信息和所述第二特征信息进行融合,得到融合特征信息,将所述融合特征信息输入所述交通流量预测模型的学习器中输出短时交通流量预测结果,其中,所述方法还包括训练所述交通流量预测模型:
12、将预先获取的训练数据集输入待训练的交通流量预测模型的当前学习器中,结合所述当前学习器之前的多个之前的多个学习器的累加结果,确定所述训练数据集对应的前向分布;
13、将待训练的交通流量预测模型的损失函数的负梯度作为下降方向迭代优化所述训练数据集对应的前向分布,直至满足迭代次数或者所述交通流量预测模型的预测精度。
14、在一种可选的实施方式中,
15、所述通过所述第一特征提取模块提取所述历史交通流量对应的第一特征信息包括:
16、确定所述历史交通流量经过所述第一特征提取模块中每一卷积层的卷积输出信息,以及所述历史交通流量经过所述第一特征提取模块中每一隐藏层的隐藏向量得分;
17、根据所述隐藏向量得分确定所述历史交通流量对应的注意力权重值,基于所述注意力权重值以及所述卷积输出信息确定所述历史交通流量对应的第一特征信息;
18、其中,确定所述历史交通流量对应的第一特征信息如下公式所示:
19、
20、其中,表示 t时刻的第一特征信息, t表示总时长,表示 t时刻卷积模块中第s层对应的卷积输出信息,、分别表示卷积模块和长短期记忆模块对应的权重,、分别表示 t-1时刻长短期记忆模块和卷积模块对应的输出。
21、在一种可选的实施方式中,
22、所述通过所述第二特征提取模块提取所述道路空间信息对应的第二特征信息包括:
23、基于所述第二特征提取模块的共享注意力机制确定所述道路空间信息中每个节点与其相邻节点的相关性;
24、结合所述道路空间信息对应的变换矩阵,以及非线性激活函数,确定所述道路空间信息对应的第二特征信息;
25、其中,确定所述第二特征信息的方法如下公式所示:
26、
27、其中, e表示第二特征信息, g表示道路拓扑图, a表示道路拓扑图对应的邻接矩阵,表示道路空间信息对应的变换矩阵,表示超参数, 表示每个节点与其相邻节点的相关性, 表示非线性激活函数。
28、在一种可选的实施方式中,
29、结合所述当前学习器之前的多个弱学习器的累加结果,确定所述训练数据集对应的前向分布,将待训练的交通流量预测模型的损失函数的负梯度作为下降方向迭代优化所述训练数据集对应的前向分布,直至满足迭代次数或者所述交通流量预测模型的预测精度包括:
30、多个弱学习器的累加结果表示为:
31、
32、其中, 表示多个弱学习器的累加结果, x表示输入弱学习器的输入值,表示多个弱学习器的输出值, m表示弱学习器的个数, 表示第 i个弱学习器的在所有学习器中所占比重, 表示第 i个弱学习器的学习参数;
33、确定所述训练数据集对应的前向分布如下公式所示:
34、
35、其中, n表示迭代次数,表示弱学习器的最优参数;
36、将待训练的交通流量预测模型的损失函数的负梯度作为下降方向迭代优化所述训练数据集对应的前向分布如下公式所示:
37、
38、其中, loss表示损失函数, 表示损失函数的负梯度。
39、在一种可选的实施方式中,
40、所述基于所预测的短时交通流量,结合经过所述目标路段的目标车辆的目的地信息设置路阻函数,并以最短经过时间为目标,进行路径规划包括:
41、基于经过所述目标路段的目标车辆的当前节点,将所述短时交通流量、目的地信息,以及影响路径规划的影响因素作为所述路阻函数的因变量设置所述路阻函数,并以所述最短经过时间为目标,迭代求解所述路阻函数,直至所述路阻函数的参数满足预设条件,输出路径规划策略。
42、在一种可选的实施方式中,
43、所述路阻函数如下公式所示:
44、
45、其中, l表示路阻函数的输出值,表示目标车辆的当前节点对应的道路拓扑图,表示目标车辆的当前节点, 表示目的地信息, 表示影响路径规划的影响因素,表示预测短时交通流量信息。
46、本公开实施例的第二方面,
47、提供一种基于人工智能的城市管理系统,包括:
48、第一单元,用于将城市路网中目标路段抽象为节点,将目标路段的连接关系抽象为连接边,构建所述城市路网的道路拓扑图,基于所述道路拓扑图以及与所述道路拓扑图对应的邻接矩阵,构建道路空间信息;
49、第二单元,用于确定所述目标路段中关联路段在预设时间周期的历史交通流量,基于所述道路空间信息与所述历史交通流量,通过预先训练好的交通流量预测模型实现对所述关联路段的短时交通流量预测,其中,所述关联路段用于指示所述目标路段中关联度大于预设关联阈值的两个路段;
50、第三单元,用于基于所预测的短时交通流量,结合经过所述目标路段的目标车辆的目的地信息设置路阻函数,并以最短经过时间为目标,进行路径规划。
51、本公开实施例的第三方面,
52、提供一种电子设备,包括:
53、处理器;
54、用于存储处理器可执行指令的存储器;
55、其中,所述处理器被配置为调用所述存储器存储的指令,以执行前述所述的方法。
56、本公开实施例的第四方面,
57、提供一种计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现前述所述的方法。
58、本技术的基于人工智能的城市管理方法,为捕获道路空间信息与所述历史交通流量时间属性邻近性与周期性特征,通过提取局部的空间特征,并挖掘潜在的流量规律,进一步提取道路空间信息与所述历史交通流量在时序上的依赖关系与空间维度的特征,其中,历史交通流量对应特征的作用就是为了提取数据时间维度的特征,而道路空间信息对应的特征就是为了刻画影响流量变化空间上的因素,而最终的输出融合特征就是通过卷积的方式将两者进行融合,联结起来反映时空维度的相互作用,能够有效避免因模型结构复杂而导致的训练时长过长等问题,加强交通流量预测模型对时空特征的提取准确性。
59、本技术的交通流量预测模型,对训练样本进行采样,能够实现在保留大梯度样本的同时减少小梯度样本采样,降低样本维度、减少样本加速模型训练从而降低决策树生成的复杂性;进一步通过减少特征个数使数据规模进一步变小,用于减少较高特征维度下缩减数据要素的数量,并从要素规模角度优化算法复杂度。
- 还没有人留言评论。精彩留言会获得点赞!