一种全局搜索快速收敛多约束弹道优化方法与流程
本发明涉及弹道优化领域,尤其是一种全局搜索的多约束弹道优化方法。
背景技术:
1、超远程制导火箭兼具射程远、速度高、机动和突防能力强、成本低、精度高等多种优势,在现代战争中的地位愈加重要。弹道设计是超远程制导火箭总体方案论证时重要环节和基础,最优化的弹道设计可大幅降低结构热防护设计和制导控制系统设计压力,间接降低系统成本。
2、弹道优化是一个较为复杂的非线性优化问题,需要在制导火箭落角、落点攻角、落速、弹道高度、最大过载或法向力、热流密度及总加热量等多种约束条件下,设计一种最优的控制参数(三自由度弹道通常为攻角或弹道倾角),使制导火箭射程、飞行时间、落点偏差等目标函数达到最优状态。常用的弹道优化方法分为间接法、直接法和智能优化算法,其中智能优化算法以其独特的作用机制和良好的优化效果,在弹道设计中得到越来越多的广泛应用。
3、粒子群优化算法(particle swarm optimization,pso)是一种进化计算技术,模拟鸟群飞行觅食的行为,通过鸟之间的集体协作使群体达到最优。粒子群算法概念简单,所用参数较少,易于工程实现,具有很强的发现较好解的能力,并不容易陷入局部最优。传统粒子群优化算法对于单目标弹道优化问题具有较好的效果,但对于多约束弹道优化问题难以获得较好的全局最优解,且收敛速度较慢。因此,如何实现全局最优、快速收敛、适应多目标约束成为弹道优化急需解决的技术难题。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种全局搜索快速收敛多约束弹道优化方法。本发明多个离散时刻攻角组成优化变量,建立改进的粒子群优化算法,获得满足制导火箭落角、落速、弹道高度、最大过载或法向力、热流密度等多约束条件的全局最优解,该算法具有快速收敛性,易于工程实现。
2、本发明解决其技术问题所采用的技术方案的步骤如下:
3、步骤1:利用飞行力学原理,建立制导火箭弹道解算方程,以纵平面运动为研究目标,建立制导火箭纵向运动方程;
4、步骤2:确定弹道优化目标函数和约束条件,建立弹道优化数学模型;
5、将整个飞行时间段内攻角离散序列作为优化变量,以落点偏差量为目标函数,以落角、落速、弹道高度、最大过载或法向力、热流密度作为约束条件,建立优化数学模型,由于各项约束变量单位不统一,因此对目标函数和约束条件进行归一化处理;然后采用惩罚函数法,将带约束优化问题转化为无约束优化问题;
6、步骤3:建立标准粒子群优化算法;
7、将各离散时间序列上的攻角作为每个粒子各个维度的数值,构成群体中的单个粒子,建立粒子速度和位置更新模型,并用步骤2中的目标函数进行适应度计算,作为粒子优劣程度评价依据;
8、步骤4:确定改进迭代策略;
9、由于标准粒子群优化算法同时改变粒子各个维度的数值,只能对粒子整体质量进行评价,而不能判断部分维度是否向最优方向移动,因此改进粒子迭代策略,按制导火箭飞行程序,将整个时间段内攻角序列划分为多个子矢量,在每次粒子速度和位置更新过程中,首先对每个各个子矢量进行优劣程度进行评价和调整,从而在每次迭代中尽可能保留每个粒子中的最优子矢量,即某一段攻角已达到当前最优位置后,则不再做调整,从而大幅加快粒子群收敛速度;
10、步骤5:进行弹道迭代优化解算和适应度评价;
11、设置初始条件,进行迭代计算,当目标函数的适应度值收敛时,获得最优攻角序列和最优弹道。
12、所述步骤1建立制导火箭弹道解算方程的步骤为:
13、在发射坐标系,建立制导火箭纵向运动方程;
14、(1)
15、其中,m为制导火箭质量,为发射系x向速度,为发射系y向速度,为发动机推力,为轴向力系数,为法向力系数,为动压,为大气密度,为制导火箭合速度,为发射系x向位置,为发射系y向位置,为弹道倾角,为俯仰角,为攻角,为地球平均半径,为发射点大地高度,为制导火箭到地心距离,为制导火箭离地高度,为地球引力系数,s为制导火箭的参考面积。
16、所述建立弹道优化数学模型时,以攻角序列为优化变量,记为,在大于制导火箭最大飞行时间的时间段内进行等间距取点,攻角选取取值范围为±15°。
17、所述约束条件包括制导火箭落角、落速、弹道高度、法向力和热流密度,具体如下:
18、 (2)
19、其中,,,为火箭端头半径;为落点弹道倾角约束上限,和分别为落点处速度约束下限和约束上限,为最大离地高度,为最大法向力,为最大热流密度,参数、、、、、和根据制导火箭制导要求、毁伤要求、飞行要求、结构强度要求及热防护要求确定;
20、所述优化数学模型中优化目标为制导火箭落点偏差量,即目标函数为:
21、 (3)
22、其中分别为制导火箭落点在发射系轴向和纵向位置,分别为目标点在发射系轴向和纵向位置;
23、弹道优化问题描述为:
24、 (4)
25、利用惩罚函数法,将公式(4)转化为无约束优化问题,并对目标函数和约束条件进行归一化处理,即:
26、(5)
27、其中为射程,即发射点至目标点大地线距离,为绝对值函数。
28、所述步骤3中建立标准粒子群优化算法模型的步骤为:
29、目标搜索空间维数为优化变量攻角序列的数量,即为,设群体由个粒子构成,为第个粒子的维位置矢量,,根据步骤2的目标函数计算当前的适应度值,目标函数为惩罚函数值,适应度值可衡量粒子位置的优劣,值越小,位置越好;为第i个粒子的第n维位置变量,为第i个粒子的第n维速度变量,为第i个粒子迄今为止搜索到的第n维最优位置变量,为整个粒子群迄今为止搜索到的第n维最优位置变量,且为第个粒子的飞行速度,即粒子移动的距离;为第个粒子迄今为止搜索到的最优位置,为整个粒子群迄今为止搜索到的最优位置。
30、在每次迭代计算中,粒子速度和位置更新公式如下:
31、 (6)
32、其中,为第k次迭代过程中第i个粒子的第d维速度变量,为第i个粒子的第d维迄今为止搜索到的最优位置变量,为整个粒子群的第d维整个粒子群迄今为止搜索到的最优位置变量,为第k次迭代过程中第i个粒子的第d维位置变量,,为迭代次数,和为之间的随机数,用来保持群体多样性,和为学习因子,使粒子具有自我总结和向群体中优秀个体学习的能力,从而向自己的历史最优点以及群体内历史最优点靠近。
33、所述步骤4中,确定改进迭代策略的步骤为:
34、将每个粒子的维位置和速度矢量划分为段子矢量,每个子矢量包含维,l为整数,在粒子位置和速度更新过程中,按先后顺序逐个对每个粒子的子矢量进行循环更新,更新模型如下:
35、 (7)
36、其中,为第j个子矢量第km次迭代产生的速度变量,为第j个子矢量第km次迭代产生的位置变量,为第j个子矢量第km次迭代产生的速度增量变量,为当前粒子第j个子矢量拟更新前由各子矢量构成的位置变量,为当前粒子第j个子矢量拟更新后由各子矢量构成的位置变量,为[-1,1]之间的随机数,为每个粒子子矢量计数,为每个子矢量迭代计数,为每个子矢量最大迭代次数。
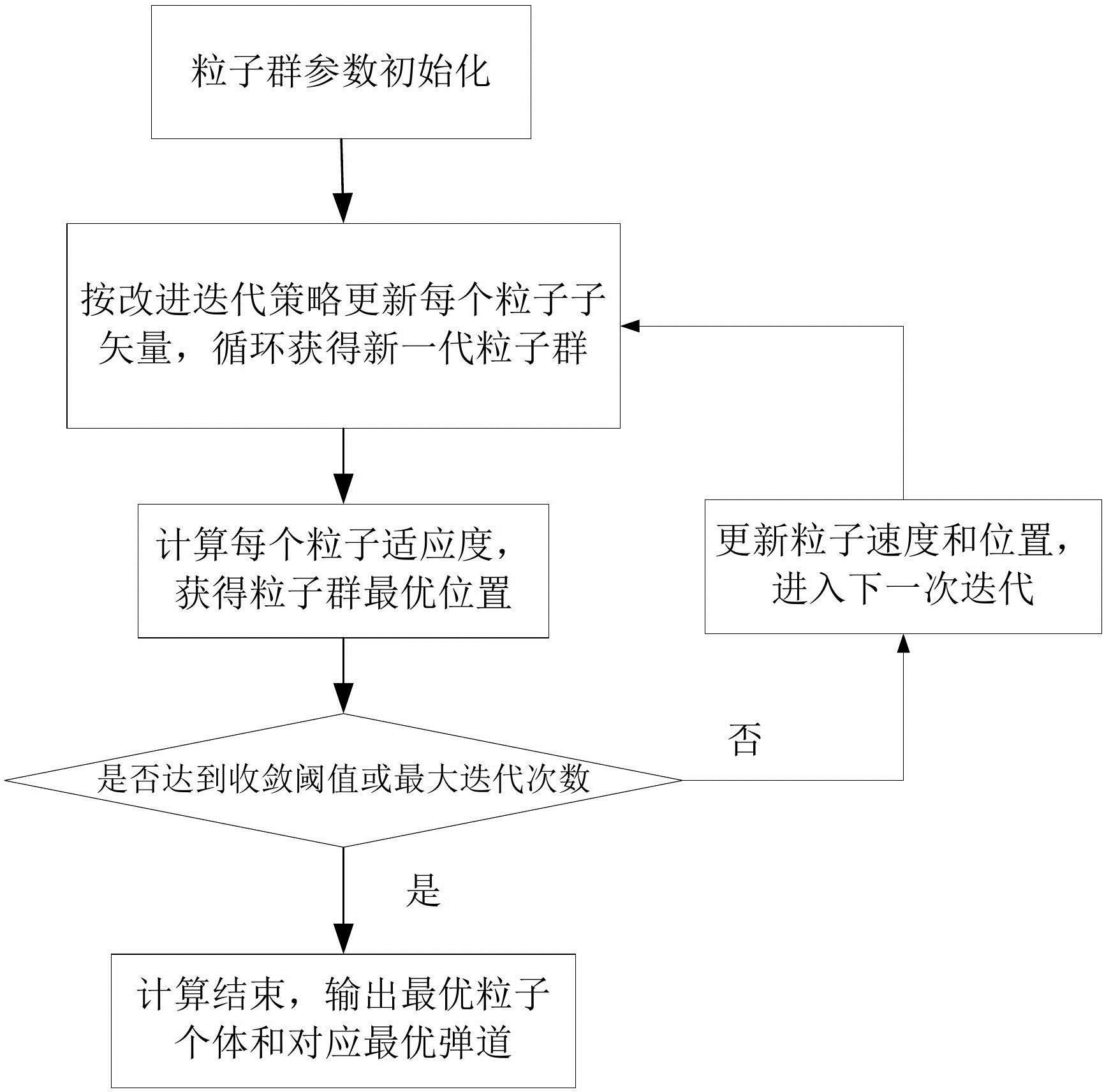
37、所述步骤5中,进行弹道迭代优化解算和适应度评价的步骤为:
38、a)首先设置迭代计算初值;
39、飞行时间平均取点,得到优化变量攻角序列,则得到由初始粒子构成的初始粒子群,按制导火箭飞行程序将每个粒子均匀划分为子矢量,设置目标函数适应度收敛阈值;
40、b)根据初始粒子群,按公式(5)计算优化目标函数的适应度值,获得并记录初始最优个体及其适应度值;
41、c)按公式(7)依次更新每个粒子的子矢量,每个子矢量每次迭代过程需要按公式(1)进行两次弹道计算,采用每个粒子的离散数值进行线性插值获得攻角连续数值,作为弹道解算控制输入;然后按公式(5)获得优化目标函数的适应度值,顺序循环得到全部粒子的位置;
42、d)按公式(5)依次计算粒子群中每个粒子优化目标函数的适应度值,获得本次迭代最小适应度值,并与前一次群体迭代获得的最优适应度值进行比较,若达到收敛阈值或粒子群最大迭代计算次数,则停止计算,否则按公式(6)更新粒子速度和位置,继续下一次迭代。
43、e)最后一次迭代中的适应度最小的粒子作为最优个体,对应弹道为最优弹道。
44、所述收敛阈值的判断公式为:
45、。
46、本发明的有益效果在于本发明提出的全局搜索快速收敛多约束弹道优化方法,可在制导火箭落角、落速、弹道高度、最大过载或法向力、热流密度等多约束条件下,快速迭代收敛,获得最优弹道,避免了算法早熟和陷入局部最优解,计算量小,简单有效,易于工程实现。
- 还没有人留言评论。精彩留言会获得点赞!