道路要素之间关联关系的确定方法及相关系统、存储介质与流程
本技术涉及智能驾驶,尤其涉及一种道路要素之间关联关系的确定方法及相关系统、存储介质。
背景技术:
1、自动驾驶需要道路结构信息来进行自车的规划控制,并辅助道路参与者的预测。传统的,道路结构信息存储于高精度地图中,道路结构信息除了车道及道路的几何信息外,还包含车道与红绿灯、路面标志、斑马线及其他车道的多种关联关系。车辆行驶时需要通过结合车道与其他规则类信息的关联关系,确定车辆需要遵守的规则。例如,车道限速及转向信息。又如,所处车道应该对照哪个红绿灯,左转车道可能需要同时观看直行灯及左转灯。
2、传统的,此类关联关系可以通过高精度地图获得。然而,高精度地图制作较为复杂。首先,高精度地图的数据采集依赖较为昂贵的采集设备;其次,高精度地图的制作流程较为复杂,且很多情况仍需大量的人工参与。这导致了当前高精度地图的制作较为缓慢,覆盖区域极为有限,且对道路场景的变化更新不及时。此外,在自动驾驶的过程中,高精度地图的使用需要高精度的定位信息,当自动驾驶的定位模块出现偶然偏差时,会导致高精度地图的加载错误,导致严重的事故。受限的高精度地图现状限制了高级别自动驾驶的应用范围,这一方面促进了高精度地图制作的发展,另一方面促进了实时道路结构认知的发展。
3、道路结构认知通过实时的分析车载传感器的采集数据,完成自车周边道路情况的重建,能够极大的扩展高阶自动驾驶的应用边界。当前较多方案仅关注到道路上几何信息的重建,近两年开始有工作关注到对车道拓扑进行解析,非常少有工作留意到还需要对道路上各种要素间的关联关系进行解析。此外,受限于几何信息的检测准确度,针对道路要素的关系推理难度较大。
技术实现思路
1、本技术公开了一种道路要素之间关联关系的确定方法及相关系统、存储介质,可以提升当前道路要素关系推理的水平。
2、第一方面,本技术实施例提供一种道路要素之间关联关系的确定方法,该方法可包括:
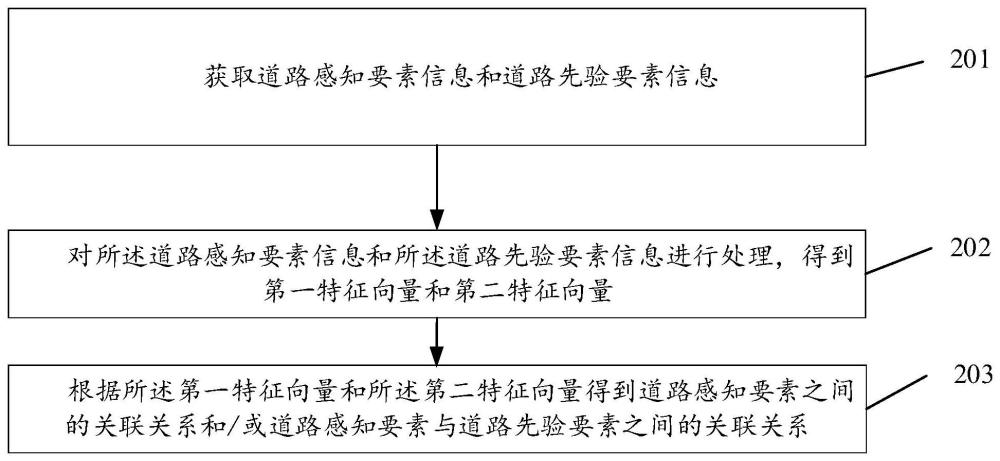
3、获取道路感知要素信息和道路先验要素信息;
4、对所述道路感知要素信息和所述道路先验要素信息进行处理,得到第一特征向量和第二特征向量;
5、根据所述第一特征向量和所述第二特征向量得到道路感知要素之间的关联关系和/或道路感知要素与道路先验要素之间的关联关系。
6、本技术实施例,通过对道路感知要素信息和所述道路先验要素信息进行处理,得到第一特征向量和第二特征向量,进而根据第一特征向量和所述第二特征向量得到道路感知要素之间的关联关系和/或道路感知要素与道路先验要素之间的关联关系。该手段,通过将当前道路要素与道路先验信息进行关联,能够借助道路先验信息作为桥接,提升当前道路要素关系推理的水平。同时,通过推理当前道路要素与道路先验之间的关系,能够构造冗余关系,便于对当前道路要素关系进行校检,提升整体方案的鲁棒性及可解释性。
7、本方案不强依赖道路先验信息做关系推理,根据需求,最终输出可以仅是当前道路要素的关联,避免由于道路先验信息陈旧引入负面影响。
8、其中,道路感知要素信息,可以理解为,是道路等要素的实时信息。该道路感知要素信息可以包括车道、道路、红绿灯、路面标志、斑马线、道路边界线、路口、标牌等要素信息中的一项或者多项,当然还可以是其他的要素信息,本方案对此不作限制。
9、道路先验要素信息,可以理解为,是道路等要素的已知信息。
10、在一种可能的实现方式中,车辆可以从路侧装置、车辆摄像头和/或雷达等传感器等途径获取到道路感知要素信息。车辆可以从用户输入或者地图(例如标清地图,导航地图(standard definition map,sd map))等途径获取到道路先验要素信息。当然还可以是其他途径,本方案对此不作限制。
11、例如,车辆从感知模块获取到道路感知要素信息,从导航地图获取到道路先验要素信息。
12、在一种可能的实现方式中,所述对所述道路感知要素信息和所述道路先验要素信息进行处理,得到第一特征向量和第二特征向量,包括:
13、分别对所述道路感知要素信息和所述道路先验要素信息进行特征提取,得到所述第一特征向量和所述第二特征向量,所述第一特征向量为道路感知要素特征向量,所述第二特征向量为道路先验要素特征向量。
14、例如,对所述道路感知要素信息进行特征提取,得到道路感知要素特征向量。对道路先验要素信息进行特征提取,得到道路先验要素特征向量。
15、在另一种可能的实现方式中,所述对所述道路感知要素信息和所述道路先验要素信息进行处理,得到第一特征向量和第二特征向量,包括:
16、对所述道路感知要素信息和所述道路先验要素信息进行特征交互处理,得到所述第一特征向量和所述第二特征向量,所述第一特征向量为融合的道路感知要素特征向量,所述第二特征向量为融合的道路先验要素特征向量。
17、该融合的道路感知要素特征向量,可以理解为,隐含考虑了道路先验要素信息的影响而得到的道路感知要素特征向量。当然,其还可以包含了道路感知要素信息之间的融合等。本方案对此不作限制。
18、相应地,该融合的道路先验要素特征向量,可以理解为,隐含考虑了道路感知要素信息的影响而得到的道路先验要素特征向量。当然,其还可以包含了道路先验要素信息之间的融合等。
19、该特征交互处理,可以理解为,在对道路感知要素信息进行特征提取的过程中同时也参考道路先验要素信息,相应地,在对道路先验要素信息进行特征提取的过程中同时也参考道路感知要素信息。
20、在一种可能的实现方式中,所述对所述道路感知要素信息和所述道路先验要素信息进行特征交互处理,得到所述第一特征向量和所述第二特征向量,包括:
21、对所述道路感知要素信息和所述道路先验要素信息进行多头注意力机制处理,得到所述融合的道路感知要素特征向量和所述融合的道路先验要素特征向量。
22、在另一种可能的实现方式中,对所述道路感知要素信息和所述道路先验要素信息进行特征交互处理,得到所述第一特征向量和所述第二特征向量,包括:
23、根据所述道路感知要素信息和道路先验要素信息中的不同要素的位置信息、类别信息、方向信息、属性信息中的至少一项,将距离小于预设距离的要素进行交互融合,得到所述融合的道路感知要素特征向量和所述融合的道路先验要素特征向量。
24、例如,将路面标志特征与车道特征交互融合,获得带有标志信息的车道描述。又例如,将同向车道进行合并形成道路级的特征描述。
25、其中,该距离,可以理解为,是信息所表明的相关程度,而不仅是传统意义上的地理距离等。该示例以距离为选择条件,当然还可以是其他条件,本方案对此不作限制。
26、本方案可以通过规则约束的方式进行实现,通过人工定义的规则来提取道路要素的关键特征,构造匹配策略来计算关联关系,并通过规则传递的方法完成最终关系的校检及输出。
27、在一种可能的实现方式中,所述根据所述第一特征向量和所述第二特征向量得到道路感知要素之间的关联关系和/或道路感知要素与道路先验要素之间的关联关系,包括:
28、根据所述融合的道路感知要素特征向量和所述融合的道路先验要素特征向量构建匹配代价函数;
29、根据所述匹配代价函数得到所述道路感知要素之间的关联关系和/或所述道路感知要素与所述道路先验要素之间的关联关系。
30、例如,该匹配代价函数可以是通过距离、朝向及类别等进行约束的函数等,本方案对此不作限制。其中,若满足构建的关联关系约束,则要素之间有关系。若不满足构建的关联关系约束,则要素之间没有关系。例如,结合获得的各种道路感知要素信息、道路先验要素信息及融合的道路感知要素特征向量、融合的道路先验要素特征向量,构建匹配代价函数,通过匹配代价函数,判断感知要素间、感知要素与先验信息间的关联关系。例如,在感知车道与sd map道路间要有关联,需要二者的几何位置靠近,并且行驶方向相似。又例如,感知车道与感知红绿灯间要有关联,需要感知车道的行进方向朝向红绿灯的位置,并且红绿灯朝向车道。
31、在一种可能的实现方式中,所述方法还包括:
32、将所述道路感知要素之间的冗余的关联关系进行合并和/或删除,得到处理后的所述道路感知要素之间的关联关系;
33、将所述道路感知要素与所述道路先验要素之间的冗余的关联关系进行合并和/或删除,得到处理后的所述道路感知要素与所述道路先验要素之间的关联关系。
34、这样可以简化道路感知要素之间的关联关系、道路感知要素与道路先验要素之间的关联关系,使得得到的关联关系结果更加清楚、简明且准确。
35、第二方面,本技术实施例提供一种道路要素之间关联关系的确定装置,包括:
36、获取模块,用于获取道路感知要素信息和道路先验要素信息;
37、处理模块,用于对所述道路感知要素信息和所述道路先验要素信息进行处理,得到第一特征向量和第二特征向量;
38、确定模块,用于根据所述第一特征向量和所述第二特征向量得到道路感知要素之间的关联关系和/或道路感知要素与道路先验要素之间的关联关系。
39、在一种可能的实现方式中,所述处理模块,用于:
40、分别对所述道路感知要素信息和所述道路先验要素信息进行特征提取,得到所述第一特征向量和所述第二特征向量,所述第一特征向量为道路感知要素特征向量,所述第二特征向量为道路先验要素特征向量。
41、在另一种可能的实现方式中,所述处理模块,用于:
42、对所述道路感知要素信息和所述道路先验要素信息进行特征交互处理,得到所述第一特征向量和所述第二特征向量,所述第一特征向量为融合的道路感知要素特征向量,所述第二特征向量为融合的道路先验要素特征向量。
43、在一种可能的实现方式中,所述处理模块,还用于:
44、对所述道路感知要素信息和所述道路先验要素信息进行多头注意力机制处理,得到所述融合的道路感知要素特征向量和所述融合的道路先验要素特征向量。
45、在另一种可能的实现方式中,所述处理模块,还用于:
46、根据所述道路感知要素信息和道路先验要素信息中的不同要素的位置信息、类别信息、方向信息、属性信息中的至少一项,将距离小于预设距离的要素进行交互融合,得到所述融合的道路感知要素特征向量和所述融合的道路先验要素特征向量。
47、在一种可能的实现方式中,所述处理模块,还用于:
48、根据所述融合的道路感知要素特征向量和所述融合的道路先验要素特征向量构建匹配代价函数;
49、根据所述匹配代价函数得到所述道路感知要素之间的关联关系和/或所述道路感知要素与所述道路先验要素之间的关联关系。
50、在一种可能的实现方式中,所述确定模块,还用于:
51、将所述道路感知要素之间的冗余的关联关系进行合并和/或删除,得到处理后的所述道路感知要素之间的关联关系;
52、将所述道路感知要素与所述道路先验要素之间的冗余的关联关系进行合并和/或删除,得到处理后的所述道路感知要素与所述道路先验要素之间的关联关系。
53、第三方面,本技术实施例提供一种道路要素之间关联关系的确定装置,包括处理器和存储器;其中,所述存储器用于存储程序代码,所述处理器用于调用所述程序代码,以执行如第一方面任一种可能的实施方式提供的方法。
54、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行以实现如第一方面任一种可能的实施方式提供的方法。
55、第五方面,本技术实施例提供一种计算机程序产品,当计算机程序产品在计算机上运行时,使得所述计算机执行如第一方面任一种可能的实施方式提供的方法。
56、第六方面,本技术实施例提供一种车辆,所述车辆包括上述第二方面任一项所述的装置。
57、可以理解地,上述提供的第二方面所述的装置、第三方面所述的装置、第四方面所述的计算机存储介质或者第五方面所述的计算机程序产品、第六方面的车辆均用于执行第一方面中任一所提供的方法。因此,其所能达到的有益效果可参考对应方法中的有益效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!