一种轨迹生成方法、车辆、电子设备及存储介质与流程
本公开涉及车辆,具体而言,涉及一种轨迹生成方法、车辆、电子设备及存储介质。
背景技术:
1、当车内无人时,车辆可能会遇到意外剐蹭、划车或是恶意破窗破门、盗窃财物等事件,这些都会导致用户的权益受损,目前一些电动汽车还可以配置哨兵模式,基于哨兵模式可以实时监控车辆周围的环境或车辆安全,但是相关技术中,哨兵模式下对车辆周围障碍物的检测准确度较低,可能存在因为漏检而导致的安全风险问题,也可能因为错检而频繁开启摄像头消耗过多电量,减少续航。
技术实现思路
1、本公开实施例至少提供一种轨迹生成方法、车辆、电子设备及存储介质。
2、第一方面,本公开实施例提供了一种轨迹生成方法,包括:
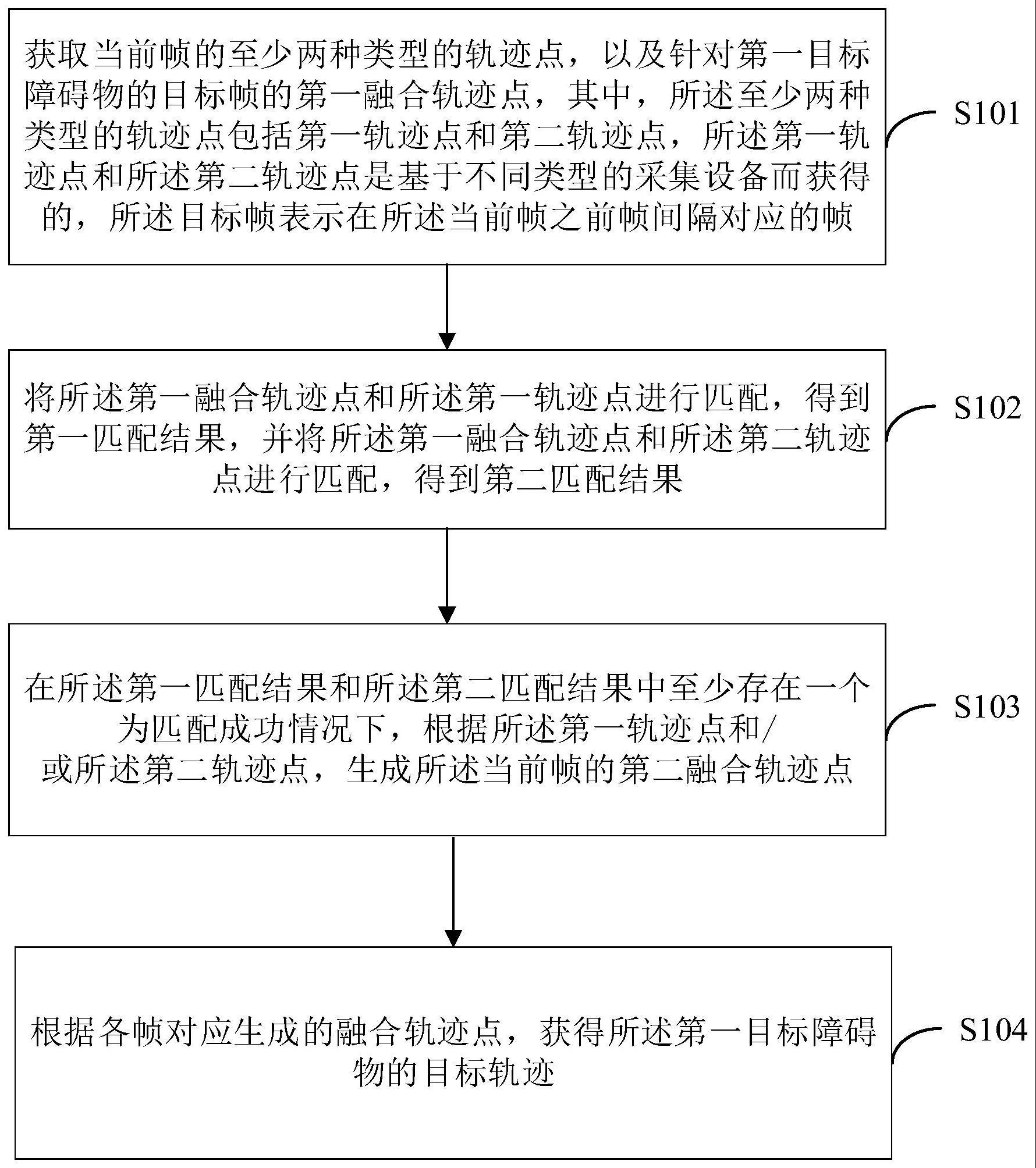
3、获取当前帧的至少两种类型的轨迹点,以及针对第一目标障碍物的目标帧的第一融合轨迹点,其中,所述至少两种类型的轨迹点包括第一轨迹点和第二轨迹点,所述第一轨迹点和所述第二轨迹点是基于不同类型的采集设备而获得的,所述目标帧表示在所述当前帧之前帧间隔对应的帧;
4、将所述第一融合轨迹点和所述第一轨迹点进行匹配,得到第一匹配结果,并将所述第一融合轨迹点和所述第二轨迹点进行匹配,得到第二匹配结果;
5、在所述第一匹配结果和所述第二匹配结果中至少存在一个为匹配成功情况下,根据所述第一轨迹点和/或所述第二轨迹点,生成所述当前帧的第二融合轨迹点;
6、根据各帧对应生成的融合轨迹点,获得所述第一目标障碍物的目标轨迹。
7、基于上述实施方式,可以实现提高对车辆周围障碍物轨迹的检测准确性,具体可以根据目标帧的融合轨迹点和基于不同类型的采集设备获得的当前帧的轨迹点的匹配结果,生成当前帧的融合轨迹点,提高检测车辆周围障碍物轨迹的准确性和鲁棒性,提高检测障碍物的覆盖范围,减少盲区。
8、一种可选的实施方式中,将所述第一融合轨迹点和所述第一轨迹点进行匹配,得到第一匹配结果,包括:
9、确定所述第一融合轨迹点和所述第一轨迹点之间的第一距离;
10、在所述第一距离符合距离条件的情况下,确定所述第一融合轨迹点与所述第一轨迹点表征同一个所述第一目标障碍物,并确定所述第一匹配结果为匹配成功;
11、在所述第一距离不符合距离条件的情况下,确定所述第一融合轨迹点与所述第一轨迹点表征不同目标障碍物,并确定所述第一匹配结果为匹配失败。
12、基于上述实施方式,通过第一融合轨迹点和第一轨迹点之间的距离是否符合距离条件来确定匹配结果,可以提高判断第一融合轨迹点和第一轨迹点是否表征同一个障碍物时的准确性,有助于提高检测车辆周围障碍物轨迹的准确性。
13、一种可选的实施方式中,将所述第一融合轨迹点和所述第二轨迹点进行匹配,得到第二匹配结果,包括:
14、确定所述第一融合轨迹点和所述第二轨迹点之间的第二距离;
15、在所述第二距离符合距离条件的情况下,确定所述第一融合轨迹点与所述第二轨迹点表征同一个所述第一目标障碍物,并确定所述第二匹配结果为匹配成功;
16、在所述第二距离不符合距离条件的情况下,确定所述第一融合轨迹点与所述第二轨迹点表征不同目标障碍物,并确定所述第二匹配结果为匹配失败。
17、基于上述实施方式,通过第一融合轨迹点和第二轨迹点之间的距离是否符合距离条件来确定匹配结果,可以提高判断第一融合轨迹点和第一轨迹点是否表征同一个障碍物时的准确性,有助于提高检测车辆周围障碍物轨迹的准确性。
18、一种可选的实施方式中,在所述第一匹配结果和所述第二匹配结果中至少存在一个为匹配成功情况下,根据所述第一轨迹点和/或所述第二轨迹点,生成所述当前帧的第二融合轨迹点,包括:
19、在所述第一匹配结果和所述第二匹配结果均为匹配成功的情况下,融合所述第一轨迹点和所述第二轨迹点,生成所述当前帧的第二融合轨迹点。
20、基于上述实施方式,在两个匹配结果均为成功时,也就是第一融合轨迹点、第一轨迹点、第二轨迹点均表征同一个障碍物时,融合上述三种轨迹点生成当前帧的融合轨迹点。通过采用上述实施方式,提高检测车辆周围障碍物轨迹的准确性和鲁棒性,提高检测障碍物的覆盖范围,减少盲区。
21、一种可选的实施方式中,在所述第一匹配结果和所述第二匹配结果中至少存在一个为匹配成功情况下,根据所述第一轨迹点和/或所述第二轨迹点,生成所述当前帧的第二融合轨迹点,包括:
22、在所述第一匹配结果为匹配成功,并且所述第二匹配结果为匹配失败的情况下,根据所述第一轨迹点,生成所述当前帧的第二融合轨迹点。
23、基于上述实施方式,在第一匹配结果为成功时,也就是第一融合轨迹点和第一轨迹点表征同一个障碍物时,融合上述两种轨迹点生成当前帧的融合轨迹点。通过采用上述实施方式,提高检测车辆周围障碍物轨迹的准确性和鲁棒性,提高检测障碍物的覆盖范围,减少盲区。
24、一种可选的实施方式中,在所述第一匹配结果和所述第二匹配结果中至少存在一个为匹配成功情况下,根据所述第一轨迹点和/或所述第二轨迹点,生成所述当前帧的第二融合轨迹点,包括:
25、在所述第一匹配结果为匹配失败,并且所述第二匹配结果为匹配成功的情况下,根据所述第二轨迹点,生成所述当前帧的第二融合轨迹点。
26、基于上述实施方式,在第二匹配结果为成功时,也就是第一融合轨迹点和第二轨迹点表征同一个障碍物时,融合上述两种轨迹点生成当前帧的融合轨迹点。通过采用上述实施方式,提高检测车辆周围障碍物轨迹的准确性和鲁棒性,提高检测障碍物的覆盖范围,减少盲区。
27、一种可选的实施方式中,将所述第一融合轨迹点和所述第一轨迹点进行匹配,得到第一匹配结果,并将所述第一融合轨迹点和所述第二轨迹点进行匹配,得到第二匹配结果之后,所述方法还包括:
28、在所述第一匹配结果和所述第二匹配结果均为匹配失败的情况下,确定所述第一目标障碍物在所述当前帧为丢失状态,并根据所述帧间隔,更新所述第一目标障碍物的丢失时间。
29、基于上述实施方式,当第一匹配结果和第二匹配结果均为匹配失败的情况下,也就是当前帧中不存在可以与目标帧的第一融合轨迹点表征同一个障碍物的轨迹点,即基于当前帧采集设备采集到的数据,无法确定上述障碍物在当前帧的位置,这时可以确定上述障碍物处于丢失状态,并且根据当前帧和目标帧之间的帧间隔,更新上述障碍物的丢失时间,这样,可有助于释放更多计算资源,有助于提高检测车辆周围障碍物轨迹时的效率,提高系统的性能和实时性。
30、一种可选的实施方式中,所述更新所述第一目标障碍物的丢失时间后,所述方法还包括:
31、确定更新后的丢失时间大于丢失时间阈值的情况下,删除所述目标帧的第一融合轨迹点。
32、基于上述实施方式,当检测到障碍物处于丢失状态的时间大于丢失时间阈值时,删除上述障碍物对应的融合轨迹点,这样,可以释放更多计算资源,有助于提高检测车辆周围障碍物轨迹时的效率,提高系统的性能和实时性。
33、一种可选的实施方式中,所述方法还包括:
34、判断所述第一目标障碍物的丢失时间是否大于丢失时间阈值;
35、在所述第一目标障碍物的丢失时间大于丢失时间阈值的情况下,删除所述目标帧的第一融合轨迹点;
36、在所述第一目标障碍物的丢失时间不大于丢失时间阈值的情况下,执行所述将所述目标帧的第一融合轨迹点和所述第一轨迹点进行匹配,得到第一匹配结果,并将所述目标帧的第一融合轨迹点和所述第二轨迹点进行匹配,得到第二匹配结果的步骤。
37、上述实施方式中,判断目标障碍物的丢失时间,在上述障碍物的丢失时间大于丢失时间阈值的情况下,删除上述障碍物对应的目标帧的融合轨迹点,在上述障碍物的丢失时间不大于丢失时间阈值的情况下,再进行融合轨迹点和第一轨迹点、融合轨迹点和第二轨迹点的匹配过程,这样,通过丢失时间的筛选,可以释放更多计算资源,有助于提高检测车辆周围障碍物轨迹时的效率,提高系统的性能和实时性。
38、第二方面,本公开可选实现方式还提供一种电子设备,包括处理器、存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述处理器用于执行所述存储器中存储的机器可读指令,所述机器可读指令被所述处理器执行时,所述处理器执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
39、第三方面,本公开可选实现方式还提供一种车辆,所述车辆包括上述第二方面中任一种可能的实施方式中的电子设备。
40、第四方面,本公开可选实现方式还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
41、关于上述车辆、电子设备、及计算机可读存储介质的效果描述参见上述轨迹生成方法的说明,这里不再赘述。
42、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开的技术方案。
43、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!