障碍物检测方法、车辆控制方法、装置、设备及存储介质与流程
本公开涉及人工智能领域、智能驾驶领域和智慧物流领域,更具体地,涉及一种障碍物检测方法、车辆控制方法、装置、设备及存储介质。
背景技术:
1、随着科技的快速发展,自动驾驶功能被广泛地应用于乘用车、物流载具、自动巡检车等车辆中,使车辆可以根据生成的运动路径实现自动泊车、自动巡检等自动驾驶功能,从而提升了车辆的行驶效率、作业效率。
2、在实现本公开构思的过程中,发明人发现相关技术中至少存在如下问题:相关车辆难以准确地识别行驶环境中的障碍物,导致车辆在自动行驶过程中的行驶效率较低。
技术实现思路
1、有鉴于此,本公开提供了一种障碍物检测方法、车辆控制方法、装置、设备及存储介质。
2、本公开的一个方面提供了一种障碍物检测方法,包括:
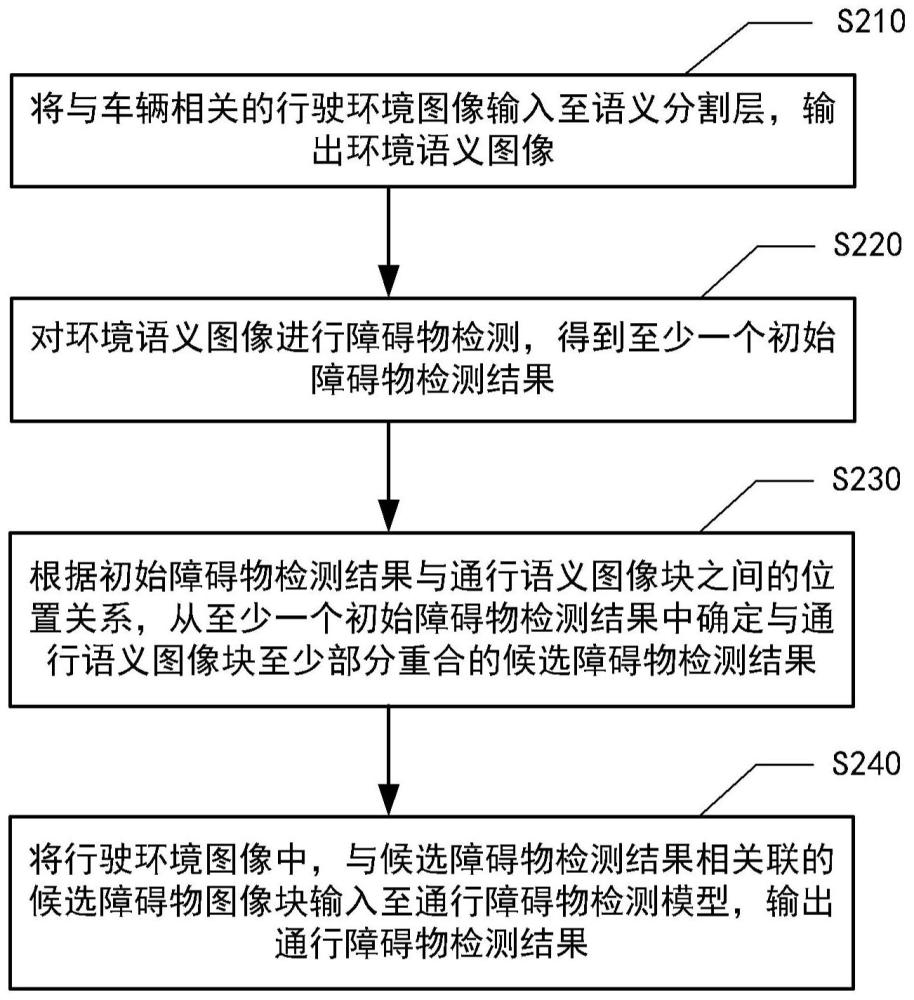
3、将与车辆相关的行驶环境图像输入至语义分割层,输出环境语义图像,其中,上述环境语义图像包括表征行驶环境中的通行区域的通行语义图像块,上述通行区域为适用于上述车辆通行的区域;
4、对上述环境语义图像进行障碍物检测,得到至少一个初始障碍物检测结果;
5、根据上述初始障碍物检测结果与上述通行语义图像块之间的位置关系,从至少一个上述初始障碍物检测结果中确定与上述通行语义图像块至少部分重合的候选障碍物检测结果;以及
6、将上述行驶环境图像中,与上述候选障碍物检测结果相关联的候选障碍物图像块输入至通行障碍物检测模型,输出通行障碍物检测结果。
7、根据本公开的实施例,上述对上述环境语义图像进行障碍物检测,得到至少一个初始障碍物检测结果包括:
8、将上述环境语义图像输入至第一障碍物检测模型,输出第一检测结果,上述第一检测结果包括多个第一障碍物分类结果,以及与多个上述第一障碍物分类结果各自对应的第一置信度;
9、在多个上述第一置信度满足预设条件的情况下,根据信息熵算法处理多个上述第一置信度,得到第一置信度熵;以及
10、根据上述第一置信度熵,将上述第一检测结果确定为上述初始障碍物检测结果。
11、根据本公开的实施例,上述语义分割层包含于第二障碍物检测模型,上述第二障碍物检测模型还包括图像对抗生成网络层、差异度评估层和异常障碍物检测层;
12、其中,上述对上述环境语义图像进行障碍物检测,得到至少一个初始障碍物检测结果包括:
13、将上述环境语义图像输入至上述图像对抗生成网络层,输出预测行驶环境图像;
14、将上述行驶环境图像和上述预测行驶环境图像输入至上述差异度评估层,输出图像差异度信息;
15、根据上述异常障碍物检测层处理上述图像差异度信息、上述环境语义图像、上述行驶环境图像和上述预测行驶环境图像,得到至少一个上述初始障碍物检测结果。
16、根据本公开的实施例,上述语义分割层还输出环境语义离散度信息,上述环境语义离散度信息表征上述环境语义图像中像素的语义预测概率离散度,上述异常障碍物检测层包括第一卷积子层、第二卷积子层、第一融合子层和图像解码子层;
17、其中,上述根据上述异常障碍物检测层处理上述图像差异度信息、上述行驶环境图像和上述预测行驶环境图像包括:
18、将上述环境语义图像、上述行驶环境图像和上述预测行驶环境图像输入至上述第一卷积子层,输出环境语义图像特征、行驶环境图像特征和预测行驶环境图像特征;
19、将上述环境语义图像特征、上述行驶环境图像特征和上述预测行驶环境图像特征的拼接结果输入至上述第二卷积子层,得到第一中间融合特征;
20、将上述第一中间融合特征、上述图像差异度信息和上述环境语义离散度信息输入至上述第一融合子层,得到第二中间融合特征;以及
21、将上述第二中间融合特征输入至上述图像解码子层,输出至少一个上述初始障碍物检测结果。
22、根据本公开的实施例,上述将上述行驶环境图像中,与上述候选障碍物检测结果相关联的候选障碍物图像块输入至通行障碍物检测模型,输出通行障碍物检测结果包括:
23、将上述候选障碍物图像块输入至上述通行障碍物检测模型的障碍物识别层,输出候选障碍物类别,其中,上述通行障碍物检测模型还包括通行条件预测层;
24、将上述候选障碍物类别输入至上述通行条件预测层,输出与上述候选障碍物检测结果相对应的预测通行条件参数;以及
25、根据上述预测通行条件参数,将上述候选障碍物检测结果确定为上述通行障碍物检测结果。
26、根据本公开的实施例,上述障碍物检测方法还包括:
27、根据上述通行障碍物检测结果,生成障碍物检测报文;以及
28、向目标客户端发送上述障碍物检测报文。
29、本公开的另一个方面提供了一种车辆控制方法,包括:
30、采集与车辆相关的行驶环境图像;
31、根据本公开实施例提供的障碍物检测方法处理上述行驶环境图像,得到通行障碍物检测结果;以及
32、根据上述通行障碍物检测结果,控制上述车辆执行运动操作。
33、本公开的另一个方面提供了一种障碍物检测装置,包括:
34、环境语义图像获得模块,用于将与车辆相关的行驶环境图像输入至语义分割层,输出环境语义图像,其中,上述环境语义图像包括表征行驶环境中的通行区域的通行语义图像块,上述通行区域为适用于上述车辆通行的区域;
35、初始障碍物检测结果获得模块,用于对上述环境语义图像进行障碍物检测,得到至少一个初始障碍物检测结果;
36、候选障碍物检测结果获得模块,用于根据上述初始障碍物检测结果与上述通行语义图像块之间的位置关系,从至少一个上述初始障碍物检测结果中确定与上述通行语义图像块至少部分重合的候选障碍物检测结果;以及
37、通行障碍物检测结果获得模块,用于将上述行驶环境图像中,与上述候选障碍物检测结果相关联的候选障碍物图像块输入至通行障碍物检测模型,输出通行障碍物检测结果。
38、本公开的另一个方面提供了一种车辆控制装置,包括:
39、采集模块,用于采集与车辆相关的行驶环境图像;
40、障碍物检测模块,用于根据权利要求1至6中任一项上述的障碍物检测方法处理上述行驶环境图像,得到通行障碍物检测结果;以及
41、控制模块,用于根据上述通行障碍物检测结果,控制上述车辆执行运动操作。
42、本公开的另一个方面提供了一种电子设备,包括:
43、一个或多个处理器;
44、存储器,用于存储一个或多个程序,
45、其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上所述的方法。
46、本公开的另一方面提供了一种计算机可读存储介质,存储有计算机可执行指令,所述指令在被执行时用于实现如上所述的方法。
47、本公开的另一方面提供了一种计算机程序产品,所述计算机程序产品包括计算机可执行指令,所述指令在被执行时用于实现如上所述的方法。
48、根据本公开的实施例,通过从初始障碍物检测结果中,确定与通行语义图像块至少部分重合的候选障碍物检测结果,可以去除行驶环境图像中与车辆的通行区域无关的初始障碍物检测结果,进而减少后续通行障碍物检测模型所需处理的数据量,同时借助通行障碍物检测模型的图像分类性能来得到通行障碍物检测结果,可以提升针对碾压通过障碍物的通行条件的预测准确性,解决障碍物检测准确性较低的技术问题,实现提升后续车辆控制的精确性的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!