一种ADAS性能试验方法与流程
本发明属于汽车,具体的说是一种adas性能试验方法。
背景技术:
1、随着智能驾驶汽车的兴起,其自动驾驶功能控制软件可靠性、准确性的验证越发重要,智能网联测试行业也愈发重要,工信部在2022年发布《国家车联网产业标准体系建设指南(智能网联汽车)(2022年版)》,计划发布智能网联汽车测试相关标准20余项,截至2022年,caicv中国智能网联汽车产业创新联盟计划发布智能网联汽车测试相关标准50余项。但是,随着标准体系的完善,企业智能网联功能的增多,adas相关性能指标试验需求量激增,目前迫切需求一款数字化、智能化的试验流程和试验方法,能够快速的实现数百个指标验证和报告输出。
2、智能网联车辆性能试验过程,目前市面已有的技术方案如下:
3、1)针对数十个功能,开展场地测试,人工编写记录表,记录试验数据与试验进度;
4、2)人工从试验设备中导出数据,对数据进行手动整理,编写脚本或半自动化数据处理软件,得到试验结果及图表
5、3)手动编写试验报告
6、现有的方案缺点如下:
7、1)数十个功能、数千个试验工况,人工编写记录表,效率较低,不能满足试验需求;
8、2)不同试验设备的数据多靠人工整理,缺少统一数据处理算法,正确性较低;
9、3)从数据到试验报告缺乏高效自动化流程,多人工手动分析、校验,效率低,准确度低。
技术实现思路
1、为解决上述问题,本发明提供了一种adas性能试验方法,实现试验工况与试验数据的对应,以及试验报告的自动化生成,大幅提升了报告编写效率,快速得出试验结论,并且实现不同试验项目的数据字段统一和性能指标达成度自动化判定,降低错误率。
2、本发明技术方案结合附图说明如下:
3、一种adas性能试验方法,包括以下步骤:
4、步骤一、对试验工况进行解构;
5、将试验工况由一段图文描述,转化为结构化数据,实现从文字至计算机语言的转化;
6、步骤二、对配置文件进行设计;
7、将不同项目、不同试验试验设备采集的试验数据设置配置文件,实现对不同数据信号名称的统一;
8、步骤三、对数据处理算法进行设计;
9、所述数据处理散发包括纵向控制类数据处理算法、横向控制类数据处理算法和报警类数据处理算法;
10、步骤四、对报告文件进行解构;
11、报告文件解构包括试验报告中的试验结果表头设定、绘图信号选择及指标选择,通过设计通用可配置的字段,实现不同项目、不同功能的试验报告通用化生成;
12、步骤五、生成报告文件;
13、依据步骤二中配置文件中的adas功能列,选取对应的数据处理算法,按照输入的评价指标以及步骤四中报告输出所需的字段,生成特定格式的文本文件。
14、进一步的,步骤一中,所述试验工况由一段图文转化为结构化数据的转化方法如下:
15、11)定义试验工况;
16、12)定义6层场景描述方法;
17、13)定义事件描述方法;
18、14)定义工况的终止时间;
19、15)定义试验工况编号规则;
20、16)定义包含按照步骤12)所描述的场景、定义包含按照步骤13)描述的事件的过程状态、定义终止状态为步骤14)描述的终止事件。
21、进一步的,所述步骤11)中,试验工况包括初始状态、过程状态和终止状态。
22、进一步的,所述步骤12)中,6层场景包括第一层:道路结构,包括道路类型、道路id、几何类型、半径、长度、平整度、坡度,表面铺装类型、摩擦系数、车道数、车道宽度;第二层:交通设施,包括,标线位置、标线类型、质量、分隔带类型、分隔带位置、特殊障碍物;第三层:临时交通设施,包括临时标志、临时分隔带位置、类型、临时障碍物及路面特殊覆盖物;第四层:交通参与者,包括参与者id、类别、与本车纵向距离、与本车横向距离、与本车夹角、动作、与本车纵向绝对速度、与本车横向绝对速度、与本车纵向绝对加速度、与本车横向绝对加速度;第五层:环境,包括时段、天气、温度、能见度、风速、光干扰;第六层:本车层,包括本车动作、人工干预、设定车速、设定时距等级、速度、加速度;描述方法架构如下表所示:
23、工况描述方法架构表
24、
25、
26、
27、进一步的,所述步骤13)中,事件描述方法包括事件id,事件触发条件、执行动作及事件持续时间,触发条件包括触发事件、步骤12)所定义的场景及动作状态,触发事件包括触发事件的id以及事件改变方式;执行动作包括步骤12)所定义的场景发生的所有改变事件,事件描述架构如下表所示:
28、事件描述架构表
29、
30、进一步的,所述步骤14)中,工况的终止事件包括“车辆发生碰撞,超时,功能退出,违反交通规则,驾驶员接管”和“本车车速稳定超过5s”。
31、进一步的,所述步骤15)中,试验工况编号规则为:adas功能名称-试验工况类别-顺序号。
32、进一步的,所述步骤16)中,初始状态包含按照步骤12)所描述的场景,定义过程状态包含按照步骤13)描述的事件,定义终止状态为步骤14)描述的终止事件。
33、进一步的,所述步骤二的具体方法如下:
34、21)定义项目层级;
35、22)定义每个项目下配置文件包含3个字段。
36、进一步的,所述步骤21)中,项目层级包括不同项目的名称,项目层级名命规则为:项目名称-试验项目名称。
37、进一步的,所述步骤22)中,每个项目下配置文件包含3个字段:标准化字段名称、项目层级名称和adas功能名称。
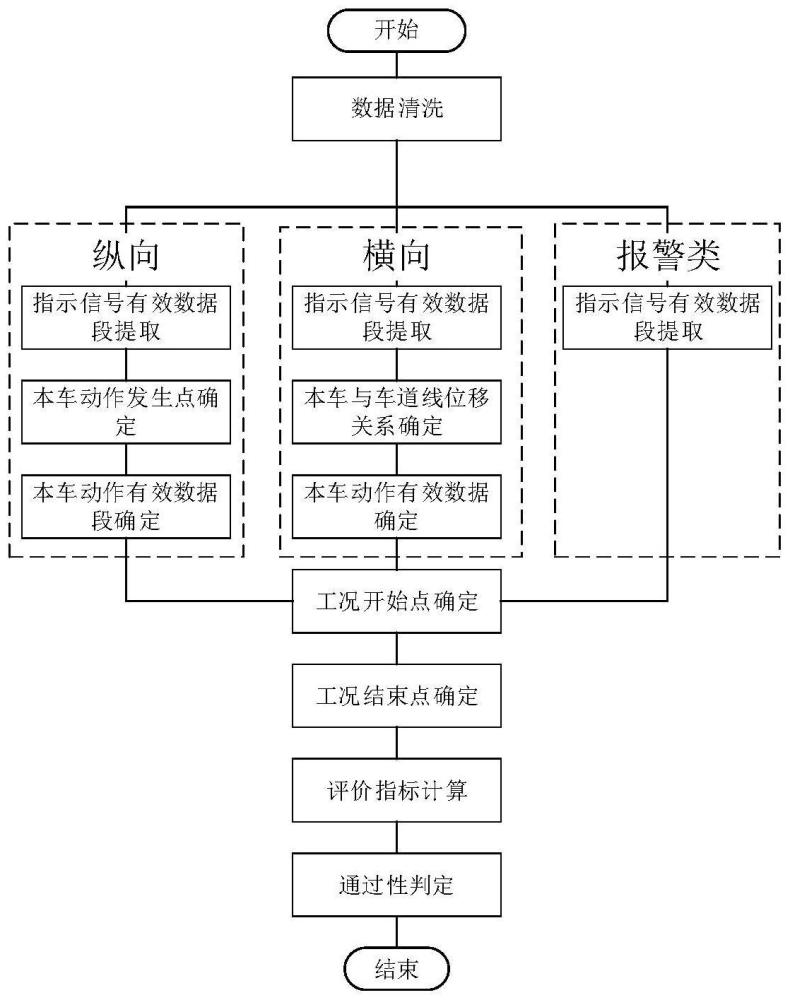
38、进一步的,所述步骤三的具体方法如下:
39、31)对数据进行清洗;数据清洗包括空缺数据补齐、车道线数据清洗、方向盘转角清洗及其他连续时域信号清洗;
40、32)对提示信号有效数据段进行提取;
41、33)对本车动作发生点进行确认;
42、34)本车动作结束点为步骤32)确定得有效数据段终点与相对速度或者其他时域信号趋于稳定时得时间点后延5s的点中二者较小值;
43、35)确定本车与车道线位移关系;
44、36)本车动作有效数据段起点为:步骤32)确定的有效数据段起点对应时间点,本车动作有效数据段终点为:步骤34)确定的本车动作结束点;
45、37)该工况的起点为本车动作有效数据段起点和终点缩短80%;
46、38)对评价指标进行计算;
47、39)依据输入的指标值,与计算指标值进行比较,对通过性进行判定,得出试验工况是否通过最终结果。
48、进一步的,所述步骤31)的具体方法如下:
49、311)空缺数据补齐包括线性插值、空值填充;
50、312)车道线数据清为去除车轮轮缘距离车道线距离导数大于3的值,然后使用步骤311)所述方法进行补齐;
51、313)方向盘转角清洗为将方向盘转角信号乘以方向盘转角方向信号,将方向盘向左转动数值为正,方向盘向右转动数值为负;
52、314)其他连续时域信号清洗方法如下:
53、a)斯核函数的标准差为σ,均值为μ,以均值以外μ±nσ标准差的长度进行截断的高斯模板,如下所示:
54、
55、b)出现时间顺序,使用模板从该数据的第一个点进行扫描,当模板未与数据完全重合时,未重合部分的数据,采用边界延长的方式补齐,将模板值与数据重合的位置对应的值进行累计乘积运算,作为高斯模板中的中值所对应的点的数据滤波值;
56、c)随后依次向右滑动,直至所有数据滤波完毕;
57、d)更新高斯模板均值处对应的原始数据。
58、进一步的,所述步骤32)的具体方法如下:
59、321)构建标识列,将提示信号为有效值时,标识列为1,否则为0;
60、322)对标识列进行求导,得到标识列的导数列,并将末尾值置1;
61、323)对标识列进行反向求导,得到标识列的反导数列,并将首位值置1;
62、324)筛选导数列与反导数列中非0的值对应的时间点,则反导数列非0的点与导数列为0的点对应的时间轴组成每个有效数据段的起终点时刻;
63、325)组成单数顺位的相对速度区间则为第一个区间对应的本车状态,偶数顺位的则相反;
64、其中,对于横向控制类数据和纵向控制类数据进行处理时,应对有效数据段时间间隔小于1s的区间进行合并。
65、进一步的,所述步骤33)的具体方法如下:
66、a)如果是触发类信号作为动作触发,则选取触发信号由无效值跳变至有效值的时间点作为本车动作发生点;
67、b)如果是相对速度或者其他时域信号趋于稳定时,作为动作触发点,则确定方法如下:
68、取在步骤32)中有效数据段内的数据;
69、对时域信号进行归一化处理;
70、对时域信号进行求导,选择导数最大或最小值得点为标记点;
71、计算从时域信号开始点至标记点中,时域信号导数首次大于0.1得点,取该点与标记点,连接直线,该直线与时域信号导数相交得点中,距离第一个点距离最近得点,作为动作触发点。
72、进一步的,所述步骤34)中,相对速度或者其他时域信号趋于稳定时得时间点的确定方法如下:
73、取在步骤32)中有效数据段内的数据;
74、对时域信号进行归一化处理;
75、对时域信号进行求导,选择导数最大或最小值得点为标记点;
76、计算从标记点至时域信号最后一个点范围内,时域信号导数首次小于0.1的点,取该点与标记点,连接直线,该直线与时域信号导数相交得点中,距离末尾点点距离最近得点,作为动作结束点。
77、进一步的,所述步骤35)中,本车与车道线位移关系确定方法如下:
78、对数据中所有车道线数据进行清洗;
79、选取有效数据段;
80、在有效数据段内,求取本车轮缘距离车道线距离信号的最小值,记录最小值小于1的车道线信号,选取该车道线信号作为计算信号。
81、进一步的,所述步骤38)中,评价指标计算表如下表所示:
82、评价指标计算表
83、
84、进一步的,所述步骤四的具体方法如下:
85、41)构建功能列表,依据不同adas功能,构建配置文件;
86、42)构建工况列表,在某个功能配置文件下,设置配置项目,具体如下:
87、421)直接引用第一步试验工况解构后的字段;
88、422)试验工况解构后的参与评价指标计算的字段;
89、423)依据试验数据与步骤421)中字段,计算得出的字段;
90、424)图标绘制所需的字段;
91、425)自动编号的字段;
92、43)构建引用标识,其中,对于步骤421)中的字段,采用整形数进行自然顺序编号,对于步骤422),采用0-1之间的1位浮点数进行顺序编号,对于步骤423),则与步骤22)中标准化字段名称对应,对于步骤424),则以-1进行标记;
93、44)构建处理方式标识,对于非图表绘制字段,则使用true/false表明是否进行合并同类项,对于图表绘制字段,则设置其在图表中显示的标准化名称。
94、本发明的有益效果为:
95、1)本发明实现试验工况与试验数据的对应,以及试验报告的自动化生成,大幅提升报告编写效率,快速得出试验结论;
96、2)本发明能够实现不同试验项目的数据字段统一;
97、3)本发明能够实现性能指标达成度自动化判定;
98、4)本发明能够实现多种试验配置化结果输出,较人工书写提高效率接近百倍,降低错误率。
- 还没有人留言评论。精彩留言会获得点赞!