一种基于光学动作数据的虚拟主播区分方法及系统与流程
本发明属于数据采集、数据分析,具体涉及一种基于光学动作数据的虚拟主播区分方法及系统。
背景技术:
1、虚拟主播通过光学动作捕捉系统来实现动作和表情的同步,光学动作捕捉系统使用一组摄像机捕捉附在主播身上的反光坐标并将反光坐标转换为数据,从而实现对其动作的捕捉和再现;现阶段的技术是利用不同虚拟主播的光学动作数据特征不一致性,对光学动作数据进行特征提取并利用机器学习模型对不同的虚拟主播进行区分;然而,在实际的应用场景中,由于虚拟主播自身的需求和直播内容不同,其产生的光学动作数据也会受到影响,特别会对光学动作数据的质量产生较大的影响,从而使得在多个虚拟主播同时出现的场景中,不同质量的光学动作数据影响区分不同的虚拟主播的难易度;光学动作捕捉系统捕捉动作的最大速度和幅度范围对光学动作数据的质量有着直接的影响,如果在实际应用场景中,虚拟主播的动作太快或太剧烈,超出了光学动作捕捉系统的捕捉能力,可能导致运动模糊或数据点的丢失,从而使得光学动作捕捉系统的追踪精度降低以及造成光学动作数据的不连续性,直接影响光学动作数据采集的质量,进而增加了在区分虚拟主播的动作识别异常的风险性;因此亟须一种方法对收集到的光学动作数据中的异常进行标记和预警,对虚拟主播的动作数据进行区分控制。
技术实现思路
1、本发明的目的在于提出一种基于光学动作数据的虚拟主播区分方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、为了实现上述目的,根据本发明的一方面,提供一种基于光学动作数据的虚拟主播区分方法,所述方法包括以下步骤:
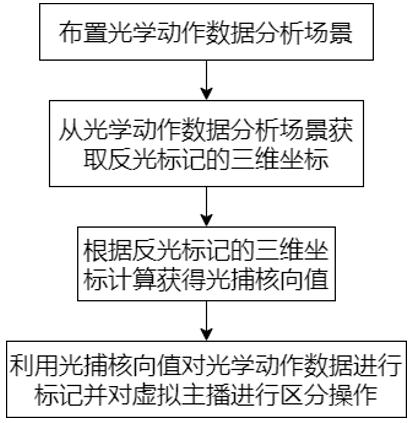
3、s100,布置光学动作数据分析场景;
4、s200,从光学动作数据分析场景获取反光标记的三维坐标;
5、s300,根据反光标记的三维坐标计算获得光捕核向值;
6、s400,利用光捕核向值对光学动作数据进行标记并对虚拟主播进行区分操作。
7、进一步地,在步骤s100中,所述布置光学动作数据分析场景的方法是:布置光学动作数据分析场景,光学动作数据分析场景中包括光学动作捕捉系统和若干个虚拟主播;其中光学动作捕捉系统由若干个光学动作捕捉镜头、若干个反光标记、若干个动作捕捉服、计算机终端以及poe交换机构成;一个虚拟主播对应一个动作捕捉服以及若干个反光标记,反光标记均匀附着在动作捕捉服上,反光标记的表面材料为反射红外光的材料,光学动作捕捉镜头是基于红外光的光学动作捕捉镜头。
8、进一步地,在步骤s200中,所述从光学动作数据分析场景获取反光标记的三维坐标的方法是:任意时刻下光学动作捕捉镜头发出特定波长的红外光,照射到反光标记,光学动作捕捉镜头接收到反光标记反射的红外光并利用poe交换机将反光标记的位置信息转换为数据传输到计算机终端,计算机终端构建反光标记在光学动作数据分析场景中的三维图像,根据任一时刻下的三维图像获得反光标记在该时刻下的三维坐标,设定一个时间段wds,wds∈[0.5,5]秒,反光标记每隔wds获得一次三维坐标。其中三维图像中的三维坐标轴默认通过poe交换机自动生成,各个反光标记的三维坐标构建均基于该三维坐标轴。
9、进一步地,在步骤s300中,所述根据反光标记的三维坐标计算获得光捕核向值的方法是:对同一个虚拟主播,设定一个时间段作为光捕周期tn,tn∈[1.5,5]小时,在最近的tn时段内以同一时刻下不同反光标记的三维坐标作为一列,以同一反光标记不同时刻下的三维坐标作为一行构建一个矩阵记作时序坐标矩阵;使得反光标记与时序坐标矩阵中的行有一一对应关系;
10、计算任一三维坐标中x、y和z轴上的坐标值的平均值记为该三维坐标的标化值sdv;
11、在时序坐标矩阵的任一行中,将各个三维坐标的标化值形成一个序列作为标化序列,将标化序列中的最大值、最小值和中位值分别记作上偏阈值、下偏阈值和回归值,将上偏阈值与回归值的差值记为上偏度hsdv,将回归值与下偏阈值的差值记为下偏度lsdv,通过下偏度和上偏度计算得到反光标记的偏衡系数比dbci,其计算方法为:
12、;
13、其中i1为时序坐标矩阵中行的序号,即反光标记的序号,lsdvi1和hsdvi1分别为第i1个反光标记的下偏度和上偏度,ln()为自然数e为底数的对数函数;
14、在时序坐标矩阵的任一列中,计算获得各个三维坐标对应标化值的平均值记作该列的横向均标值tmev,将该列各个三维坐标的标化值与该列横向均标值进行比较,获取标化值大于横向均标值的三维坐标并将该三维坐标记作其所在行的上行坐标;
15、通过偏衡系数比计算对应反光标记的光捕核向值lhqv,其计算方法:
16、;
17、其中i2为累加变量,noc为时序坐标矩阵中列的数量,tsdvi1为第i1行中上行坐标标化值的总和,ntsdi1为第i1行中上行坐标的数量,为ntsdi1为底数的对数函数;tmevi1,i2为时序坐标矩阵中第i1行第i2列的三维坐标对应标化值与该列的横向均标值的比值。
18、由于上述的光捕核向值是依靠对上行坐标识别后计算的,而上行坐标识别的方法的值反映了反光标记的三维坐标均值的波动性。但由于反光标记的在获取过程中容易出现差异小而导致数据灵敏度不足的问题,尤其是具体录制时间长度不够长的情况下,灵敏度不足的问题尤其明显,为了解决这种数据灵敏度不足的问题,提高检测的准确率,本发明提出了一个更优选的方案。
19、优选地,在步骤s300中,所述根据反光标记的三维坐标计算获得光捕核向值的方法是:
20、设定一个时间段作为光捕周期tn,tn∈[1.5,5]小时; 三维坐标中的x、y和z轴上的读值均定义子坐标值;任一时刻与其前一个时刻之间分别将x、y和z轴上的子坐标值作差,获得的值中的最大值记为该时刻的轴征值;
21、获取光捕周期内的各个轴征值构成一个序列称为轴征序列;
22、若轴征序列中的一个元素较其上一个元素数值更大,则定义该元素对应的时间点为递增点,将各个时序上连续的递增点合并后构成的时间段作为正需区间,正需区间中包含的时刻数量为正需区间的长度, 正需区间的长度至少为1;
23、根据轴征序列获取各个正需区间的长度的平均值并记为第一区间长度阈值,
24、从轴征序列中首个元素开始逆时间顺序搜索首个出现的极大值,获得极大值的元素与轴征序列中首个元素的序号差值作为第二区间长度阈值,将第一区间长度阈值和第二区间长度阈值的调和平均值作为区间长度阈值,当调和平均值不为整数则对其进行向下取整运算;若任一正需区间的长度小于区间长度阈值则将其从正需区间中剔除,即不再作为正需区间;
25、将轴征序列中正需区间的数量记为标注区间量lth;
26、对于任一个正需区间,正需区间内各个轴征值构成正需序列pseq,把正需序列的中位数记为mips,分别计算正需序列中小于mips的各个值的平均值mvq,以及正需序列中大于等于mips的各个值的平均值mvh,则该正需区间的标注轴征值mvxt的计算公式为:
27、mvxt=;
28、其中,mean<>表示平均值函数,为正需序列的标准差;将各个正需区间的标注轴征值构成一个序列作为标注轴征序列;
29、对标注轴征序列进行排列演算并获得逐比序列res,具体步骤为:
30、构建一个空序列作为逐比序列res,设定轮次计数器lc=;其中符号⌊·⌋代表向下取整符号;
31、对标注轴征序列进行lc轮遍历,任一轮遍历中均从标注轴征序列的首个元素开始遍历到第lth-1个元素;以标注轴征序列中的任一个正在遍历的元素作为当前元素,以当前元素的下一个元素作为迭向元素;当前元素的下一个元素即沿标注轴征序列遍历方向的下一个元素; 若迭向元素数值上小于当前元素,则进行排列演算后继续遍历,否则不进行排列演算继续遍历;其中排列演算的方法是,将当前元素与迭向元素的比值作为迭向增益率irt,当前元素作为迭向基值psv;把迭向增益率与迭向基值作为二元组加入res序列中,更新当前元素的值为当前元素的值的平方与迭向元素的比值,交迭向元素和当前元素在轴征序列中的位置,排列演算结束;
32、根据逐比序列计算光捕核向值lhqv的公式为:
33、lhqv =;
34、其中j1为累加变量,sigmoid()代表为激活函数,hm<>代表调和均值函数,nr为逐比序列的长度,resirt(j1)和respsv(j1)分别代表逐比序列中第j1个元素的迭向增益率和迭向基值,respsv代表仅提取迭向基值的逐比序列。
35、有益效果:由上可见,光捕核向值是根据所有反光标记在空间上的不同位置进行时间上的量化计算,通过对反光标记三维坐标的横向对比,有效量化了光学动作数据的时空变化性以及光学动作数据中快速动作数据的特异性,增加了光学动作数据中数据模糊或者反光标记丢失位置的权重,从而加强了识别光学动作数据中因快速或者高速动作导致数据质量精度下降位点的灵敏度,为进一步利用光学动作数据区分不同虚拟主播的实际应用提供了可靠的数理支撑。
36、进一步地,在步骤s400中,所述利用光捕核向值对光学动作数据进行标记并对虚拟主播进行区分操作的方法是:由虚拟主播同一时刻下的各个反光标记对应的光捕核向值组成质核向序列,虚拟主播连续获得质核向序列,将任一时刻与其前一个时刻的质核向序列的欧氏距离记为该时刻下虚拟主播的第一动作偏差,将所有虚拟主播历史中获得的各个第一动作偏差的平均值记为第二动作偏差;若当前时刻下虚拟主播的第一动作偏差小于第二动作偏差,则将当前时刻标记为该主播的糊化时刻,设定一个时间段作为光捕周期tn,tn∈[1.5,5]小时,如果任一虚拟主播的最近的tn内糊化时刻在所有时刻中的占有比例大于预设比例,其中预设比例的区间为[60%-70%],则预警该虚拟主播存在光学动作数据失真风险,为该虚拟主播在该时刻下各个反光标记进行失真标记,对该虚拟主播进行区分操作,即提高光学动作对该主播捕捉镜头的帧率5%-20%。
37、其中最近的tn内指的是当前时刻逆时间顺序搜索的tn时长内的对应时段;
38、优选地,其中,本发明中所有未定义的变量,若未有明确定义,均可为人工设置的阈值。
39、本发明还提供了一种基于光学动作数据的虚拟主播区分系统,所述一种基于光学动作数据的虚拟主播区分系统包括:处理器、存储器及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种基于光学动作数据的虚拟主播区分方法中的步骤,所述一种基于光学动作数据的虚拟主播区分系统可以运行于桌上型计算机、笔记本电脑、掌上电脑及云端数据中心等计算设备中,可运行的系统可包括,但不仅限于,处理器、存储器、服务器集群,所述处理器执行所述计算机程序运行在以下系统的单元中:
40、场景布置单元,用于布置光学动作数据分析场景;
41、坐标获取单元,用于从光学动作数据分析场景获取反光标记的三维坐标;
42、光捕核向值计算单元,用于根据反光标记的三维坐标计算获得光捕核向值;
43、数据标记单元,用于利用光捕核向值对光学动作数据进行标记并对虚拟主播进行区分操作。
44、本发明的有益效果为:本发明提供一种基于光学动作数据的虚拟主播区分方法及系统,该方法及系统量化了虚拟主播光学动作数据的光捕核向值,光捕核向值是根据所有反光标记在空间上的不同位置进行时间上的量化计算,通过对反光标记三维坐标的横向对比,有效量化了光学动作数据的时空变化性以及光学动作数据中快速动作数据的特异性,增加了光学动作数据中数据模糊或者反光标记丢失位置的权重,从而加强了识别光学动作数据中因快速或者高速动作导致数据质量精度下降位点的灵敏度,为进一步利用光学动作数据区分不同虚拟主播的实际应用提供了可靠的数理支撑,提升了虚拟主播动作的有效区分质量和光学动作数据采集质量,同时对增强光学动作捕捉系统识别快速动作的灵敏性和精确性明显增强。
- 还没有人留言评论。精彩留言会获得点赞!