一种封装支架缺陷检测方法及系统与流程
本发明涉及封装支架缺陷检测,特别涉及一种封装支架缺陷检测方法及系统。
背景技术:
1、随着全球信息技术产业的高速发展,led 芯片已广泛应用于指示器、标识、照明以及生物检测等众多领域,芯片封装是否符合质量要求直接影响到成品的外观和使用效果。二极管封装支架作为二极管器件的核心部件,对二极管的使用寿命、工作性能及可靠性都有重要影响,所以封装支架在出厂前需要对其进行严格的质量检测。
2、现有技术当中,封装支架的尺寸较小,生产过程中容易产生缺陷,在检查封装支架时通常是以人工抽检的方式为主,人工采用aoi设备或者是采用显微镜目检封装支架的缺陷,并且封装支架表面会有反光等情况,会导致检测不够准确,并且检测效率低的同时也难以保障检测一致性,从而限制了封装支架产业的进一步发展。
技术实现思路
1、基于此,本发明的目的是提供一种封装支架缺陷检测方法及系统,以至少解决上述现有技术当中的不足。
2、第一方面,本发明提供一种封装支架缺陷检测方法,所述方法包括:
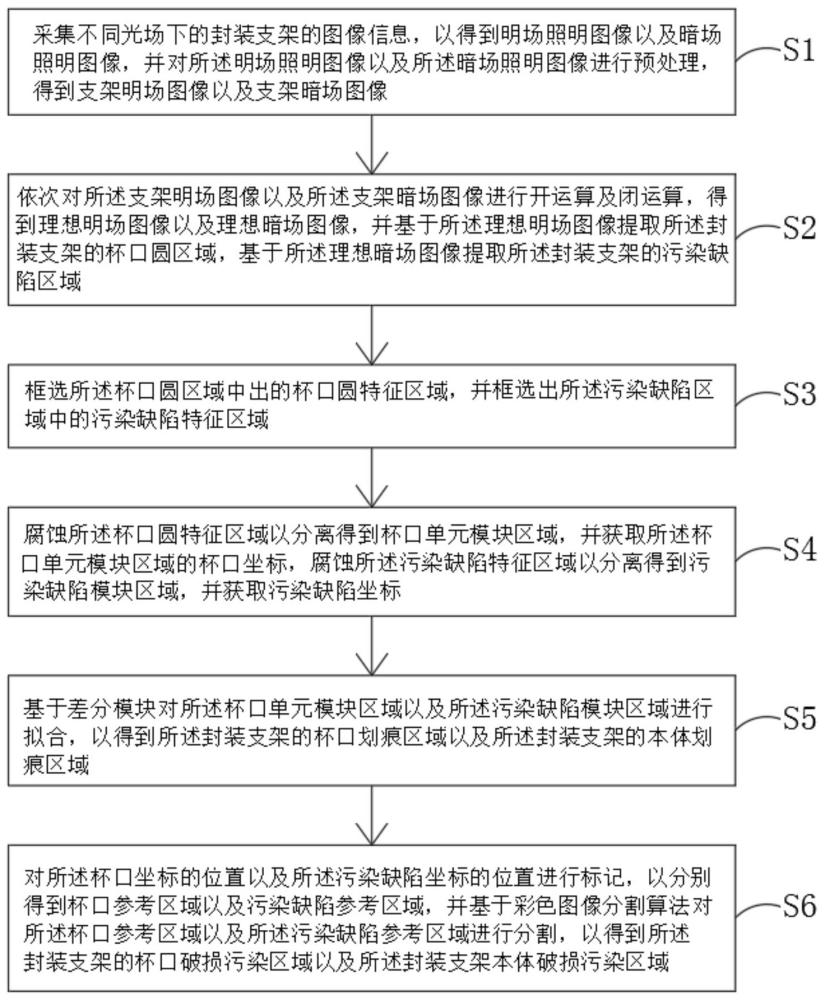
3、采集不同光场下的封装支架的图像信息,以得到明场照明图像以及暗场照明图像,并对所述明场照明图像以及所述暗场照明图像进行预处理,得到支架明场图像以及支架暗场图像;
4、依次对所述支架明场图像以及所述支架暗场图像进行开运算及闭运算,得到理想明场图像以及理想暗场图像,并基于所述理想明场图像提取所述封装支架的杯口圆区域,基于所述理想暗场图像提取所述封装支架的污染缺陷区域;
5、框选所述杯口圆区域中出的杯口圆特征区域,并框选出所述污染缺陷区域中的污染缺陷特征区域;
6、腐蚀所述杯口圆特征区域以分离得到杯口单元模块区域,并获取所述杯口单元模块区域的杯口坐标,腐蚀所述污染缺陷特征区域以分离得到污染缺陷模块区域,并获取污染缺陷坐标;
7、基于差分模块对所述杯口单元模块区域以及所述污染缺陷模块区域进行拟合,以得到所述封装支架的杯口划痕区域以及所述封装支架的本体划痕区域;
8、对所述杯口坐标的位置以及所述污染缺陷坐标的位置进行标记,以分别得到杯口参考区域以及污染缺陷参考区域,并基于彩色图像分割算法对所述杯口参考区域以及所述污染缺陷参考区域进行分割,以得到所述封装支架的杯口破损污染区域以及所述封装支架本体破损污染区域。
9、与现有技术相比,本发明的有益效果是:通过明场照明图像以及暗场照明图像,避免反光影响图像上的特征显示,使得封装支架的杯口以及本体上的划痕、破损以及污染等特征能够被更好的显示在图像上,并且通过差分模块可以得到封装支架的杯口划痕区域以及本体上的划痕区域,通过图像分割算法可以得到封装杯口以及本体上的破损污染区域,从而能够有效的检测到封装支架上的缺陷,并且相比人工具有更好的检测效率以及一致性。
10、进一步的,所述并对所述明场照明图像以及所述暗场照明图像进行预处理,得到支架明场图像以及支架暗场图像的步骤包括:
11、采用中值滤波对所述明场照明图像以及所述暗场照明图像进行滤波处理,得到滤波后的明场照明图像以及滤波后的暗场照明图像;
12、依次对所述滤波后的明场照明图像以及所述滤波后的暗场照明图像进行直方图均衡化处理以及图像锐化处理,以得到处理后的明场照明图像以及处理后的暗场照明图像;
13、对所述处理后的明场照明图像以及所述暗场照明图像矫正,以得到所述支架明场图像以及所述支架暗场图像。
14、进一步的,所述依次对所述支架明场图像以及所述支架暗场图像进行开运算及闭运算的步骤包括:
15、基于结构元素的分解对所述支架明场图像以及所述支架暗场图像进行开运算;
16、基于结构元素的分解对所述支架明场图像以及所述支架暗场图像进行闭运算,以填充所述支架明场图像以及所述支架暗场图像。
17、进一步的,所述并基于所述理想明场图像提取所述封装支架的杯口圆区域,基于所述理想暗场图像提取所述封装支架的污染缺陷区域的步骤包括:
18、二值化处理所述理想明场图像得到二值化理想明场图像,对所述二值化理想明场图像进行黑白调换,以对所述二值化理想明场图像的进行增强得到增强二值化理想明场图像,并对所述增强二值化理想明场图像与所述二值化理想明场图像进行差值运算得到杯口圆区域;
19、采用regionprops函数定位所述理想暗场图像的污染缺陷区域,并对所述污染缺陷区域进行标注。
20、进一步的,所述框选所述杯口圆区域中出的杯口圆特征区域,并框选出所述污染缺陷区域中的污染缺陷特征区域的步骤包括:
21、将所述杯口圆区域转换为杯口先验框图,并将所述污染缺陷区域转换为污染缺陷区域先验框图;
22、按照线性变化改变所述杯口先验框图以及所述污染缺陷区域先验框图的大小,以分别获取杯口圆特征区域以及污染缺陷特征区域。
23、进一步的,所述按照线性变化改变所述杯口先验框图以及所述污染缺陷先验框图的大小的表达式分别为:
24、;
25、;
26、式中,表示所述杯口先验框图与所述杯口圆区域实际尺寸的比例,、分别表示所述杯口先验框图与所述杯口圆区域比例的最小值、所述杯口先验框图与所述杯口圆区域比例的最大值,m表示不同分辨率的所述杯口圆区域的个数,表示所述污染缺陷区域与所述污染缺陷先验框图的实际比例尺寸,、分别表示所述污染缺陷区域与所述污染缺陷先验框图的比例的最小值、所述污染缺陷区域与所述污染缺陷先验框图比例的最大值,n表示不同分辨率的所述污染缺陷区域的个数。
27、进一步的,所述腐蚀所述杯口圆特征区域以分离得到杯口单元模块区域,并获取所述杯口单元模块区域的杯口坐标,腐蚀所述污染缺陷特征区域以分离得到污染缺陷模块区域,并获取所述污染缺陷坐标的步骤包括:
28、采用形态学处理将所述杯口圆特征区域以及所述污染缺陷特征区域分别腐蚀成杯口最小连通域以及污染缺陷连通域,并基于闭运算清理所述杯口最小连通域以及所述污染缺陷连通域中的纹理轮廓,以分离出所述杯口单元模块区域以及所述污染缺陷模块区域;
29、寻找所述杯口单元模块区域以及所述污染缺陷模块区域的边缘区域,以得到杯口边缘区域以及污染缺陷模块边缘区域;
30、获取所述杯口边缘区域以及所述污染缺陷模块边缘区域的边缘数据,以得到杯口边缘数据以及污染缺陷边缘数据;
31、基于所述杯口边缘数据、所述污染缺陷边缘数据分别获取所述杯口单元模块区域的杯口坐标、所述污染缺陷模块区域的污染缺陷坐标。
32、进一步的,所述基于差分模块对所述杯口单元模块区域以及所述污染缺陷模块区域进行拟合的步骤包括:
33、获取所述封装支架的杯口圆的半径大小、所述杯口圆的底部宽度以及所述封装支架的尺寸大小;
34、采用最小二乘法拟合所述杯口圆的半径、所述杯口圆的底部宽度以及所述封装支架的尺寸得到差分模块;
35、基于所述差分模块对所述杯口单元模块区域以及所述污染缺陷模块区域进行对准搜索。
36、进一步的,所述并基于彩色图像分割算法对所述杯口参考区域以及所述污染缺陷参考区域进行分割的步骤包括:
37、计算所述杯口参考区域以及所述污染缺陷参考区域中所有点的平均向量以及协方差矩阵的值,以得到杯口区域分割阈值以及污染缺陷区域分割阈值;
38、基于所述杯口区域分割阈值以及his 彩色图像模型对所述杯口参考区域进行分割,并基于所述污染缺陷区域分割阈值以及所述his 彩色图像模型对所述污染缺陷参考区域进行分割。
39、第二方面,本发明还提供一种封装支架缺陷检测系统,所述系统包括:
40、采集模块,用于采集不同光场下的封装支架的图像信息,以得到明场照明图像以及暗场照明图像,并对所述明场照明图像以及所述暗场照明图像进行预处理,得到支架明场图像以及支架暗场图像;
41、运算模块,用于依次对所述支架明场图像以及所述支架暗场图像进行开运算及闭运算,得到理想明场图像以及理想暗场图像,并基于所述理想明场图像提取所述封装支架的杯口圆区域,基于所述理想暗场图像提取所述封装支架的污染缺陷区域;
42、框选模块,用于框选所述杯口圆区域中出的杯口圆特征区域,并框选出所述污染缺陷区域中的污染缺陷特征区域;
43、腐蚀模块,用于腐蚀所述杯口圆特征区域以分离得到杯口单元模块区域,并获取所述杯口单元模块区域的杯口坐标,腐蚀所述污染缺陷特征区域以分离得到污染缺陷模块区域,并获取污染缺陷坐标;
44、拟合模块,用于基于差分模块对所述杯口单元模块区域以及所述污染缺陷模块区域进行拟合,以得到所述封装支架的杯口划痕区域以及所述封装支架的本体划痕区域;
45、标记模块,用于对所述杯口坐标的位置以及所述污染缺陷坐标的位置进行标记,以分别得到杯口参考区域以及污染缺陷参考区域,并基于彩色图像分割算法对所述杯口参考区域以及所述污染缺陷参考区域进行分割,以得到所述封装支架的杯口破损区域以及所述封装支架本体破损区域。
- 还没有人留言评论。精彩留言会获得点赞!