一种基于雷达图像的地下管线图生成方法及装置与流程
本发明涉及城市地下管网探测,特别是指一种基于雷达图像的地下管线图生成方法及装置。
背景技术:
1、城市地下管网作为重要的基础设施,不仅为城市中居民提供重要的生活物资,更承担着为城市的生产与发展提供基础资源和能量的责任。目前,城市地下管网的管理和维护存在很多问题,如管线资料缺失、不完整或不准确,导致无法及时了解地下管线的分布情况和状态。
2、为了保障城市地下管网的安全和稳定,以及避免施工过程中对管线的破坏和影响,需要提出一种能够准确、快速地探测地下管线并且获得探测区域地下管线的分布情况的方法。其中地下管道图生成是在对探测区域内的多个位置点进行探测后进一步推断探测区域内整体管道分布情况的重要途径,在实际工程中,探测地下管道时,地下环境复杂,得到的地下管道数据(包括深度、半径等)均包含噪声,误差无法避免。而使用定位设备获取探测点的位置数据时,也同样受到周边环境影响,例如使用gps定位,由于城市中高楼的遮挡以及数据传输的延时等噪声影响,位置信息的误差不能被忽视。因此在融合各个探测点的位置数据和管道数据来推测探测区域地下管道图时,需要考虑这些误差的影响。
3、绘制地下管道图时,深度和半径由探测设备获得,位置信息由定位设备获得。定位技术中,卫星定位系统定位使用最广,影响因素包括大气层、多径效应、可见卫星数量和分布、卫星钟差、轨道差、人为干扰等。在管道探测技术中,探地雷达是最主流的地下管道探测手段,通过发射电磁波并分析接收的波形、振幅、时间等数据来推断地下物体的位置、形状等。在探测地下管道时,可通过对b-scan图像中由管道产生的双曲线进行分析,计算双曲线的参数,从而获得管道的深度和半径信息。
4、在对探测区域某些点进行探测,并获取这些点的地下管道数据之后,可以通过结合由定位设备得到的位置信息,获取到区域内一些位置和管道信息的组合,接下来的工作就是从这些数据中推断出探测区域内的管道分布情况,并得到探测区域的管道分布图。在实际应用中,当获取某个位置的管道信息之后,结合定位数据,该点的管道信息将会在地图上标注,随后通过手工连接这些标注,可以组成一幅管道地图。这个过程可以自动化实现,如李博等人提出的基于哈希算法的地下管线探地雷达图像智能识别算法。根据地下管线这类孤立目标的雷达反射波图像特征,提出了基于“以图搜图”的智能识别构想,在对原始数据进行去背景等预处理的基础上,根据哈希算法(hash)以及约束矢量的k均值聚类分析,实现了地下管线的智能检测、图像的自动分选和识别。白旭等人提出一种基于3d-cnn(3d-convolutional neural network,三维卷积神经网络)算法的三维探地雷达图像地下管线识别方法,通过探地雷达获得三维回波图像,对三维回波图像进行预处理,将已预处理的探地雷达的三维回波图像进行标注,并将其打乱,随机分配至训练集和验证集;利用的训练集和验证集对3d-cnn的神经网络模型进行训练,得到训练好的权重模型;利用获得训练好的神经网络模型,对探地雷达三维回波图像进行管线目标识别检测,最终标注出带有地下管线信息的三维回波图像;可以将地下管线目标识别概率提高到95%以上,且对探地雷达三维回波图像的地下管线目标进行检测可以有效提高识别概率并且可以大幅降低管线虚检概率。
5、基于哈希算法的地下管线探地雷达图像智能识别算法主要依赖于探底雷达的探测结果,因此其识别效果可能会受到探地雷达图像的质量、噪声、分辨率等因素的影响。如果图像不清晰或有干扰,可能会导致哈希编码的不准确或聚类的错误。此外,该算法的识别效果还可能受到管线的形状、大小、深度、方向等因素的影响。如果管线存在弯曲、分叉、重叠等情况,可能导致识别区域的不确定或亮度函数的变化。最后,由于地下环境的复杂性,如果地下存在其他类型的目标或介质,可能会导致管线的反射波受到干涉或衰减。
6、同样,基于3d-cnn算法的三维探地雷达图像地下管线识别方法也主要依赖于探底雷达的探测结果。该方法也会受到三维探地雷达图像的质量、噪声、分辨率等因素的影响。如果图像不清晰或有干扰,可能会导致网络的识别精度下降。此外,该方法的训练数据集较小,只包含了四种类型的管线,可能无法适应更复杂和多样的地下管线场景。最后,该方法的网络结构较复杂,需要较多的计算资源和训练时间,可能不适合实时的应用场景。
技术实现思路
1、为了解决现有技术存在的探测地下管道时,地下环境复杂,得到的地下管道数据均包含噪声,误差无法避免;而使用定位设备获取探测点的位置数据时,也同样受到周边环境影响的技术问题,本发明实施例提供了一种基于雷达图像的地下管线图生成方法及装置。所述技术方案如下:
2、一方面,提供了一种基于雷达图像的地下管线图生成方法,该方法由地下管线图生成设备实现,该方法包括:
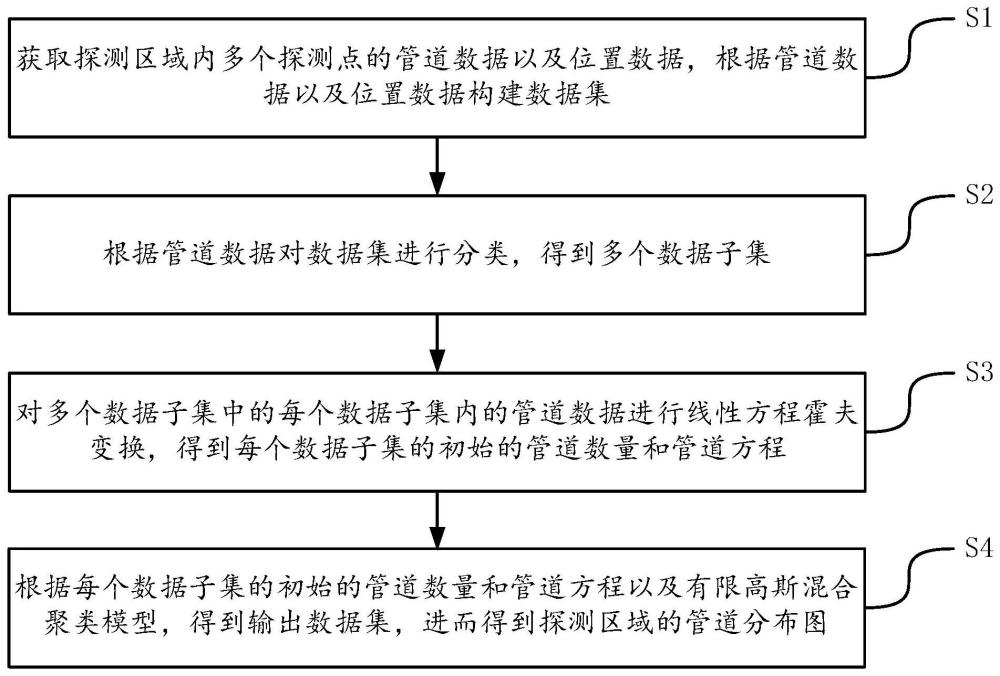
3、s1、获取探测区域内多个探测点的管道数据以及位置数据,根据管道数据以及位置数据构建数据集;其中,管道数据包括管道深度以及管道半径。
4、s2、根据管道数据对数据集进行分类,得到多个数据子集。
5、s3、对多个数据子集中的每个数据子集内的管道数据进行线性方程霍夫变换,得到每个数据子集的初始的管道数量和管道方程。
6、s4、根据每个数据子集的初始的管道数量和管道方程以及有限高斯混合聚类模型,得到输出数据集,进而得到探测区域的管道分布图。
7、可选地,s1中的数据集p,如下式(1)所示:
8、p={pi=(xi,yi,θi,di,ri)|1≤i≤n} (1)
9、式中,pi表示第i个探测点,xi表示从经度转换的第i个探测点的坐标,yi表示从纬度转换的第i个探测点的坐标,θi表示管道的预测方向,di表示第i个探测点处的管道深度,ri表示第i个探测点处的管道半径,n表示探测点数量。
10、可选地,s2中的根据管道数据对数据集进行分类,得到多个数据子集,包括:
11、根据管道深度以及管道半径,利用带噪声的基于密度的聚类算法dbscan对数据集进行聚类,得到多个数据子集。
12、可选地,s3中的对多个数据子集中的每个数据子集内的管道数据进行线性方程霍夫变换,得到每个数据子集的初始的管道数量和管道方程,包括:
13、s31、将多个数据子集中的每个数据子集的每个探测点映射到参数空间,且参数空间存在管道角度限制,生成多条曲线段。
14、其中,多条曲线段中的每条曲线段的极坐标方程,如下式(2)所示:
15、
16、式中,xi表示从经度转换的第i个探测点的坐标,yi表示从纬度转换的第i个探测点的坐标,θi表示管道的预测方向,ρ=x cosθ+y sinθ表示管道方程,θ是从原点到线段的垂直线与东方向之间的角度,n′表示数据子集的探测点数量。
17、s32、计算多条曲线段的交点,对交点进行聚类,得到聚类结果。
18、s33、根据聚类结果中每个类的质心的值确定每个数据子集的初始的管道方程的参数,根据聚类结果的类数确定每个数据子集的初始的管道数量。
19、可选地,s4中的根据每个数据子集的初始的管道数量和管道方程以及有限高斯混合聚类模型,得到输出数据集,包括:
20、s41、设定每个数据子集包括k个高斯分布,每个高斯分布对应一个聚类簇。
21、s42、采用期望最大化em算法,估计每个高斯分布的参数,并最大化每个探测点属于每个高斯分布的概率。
22、s43、根据每个探测点属于每个高斯分布的概率,将探测点划分到对应的聚类簇中,进而得到输出数据集。
23、可选地,s42中的采用期望最大化em算法,估计每个高斯分布的参数,并最大化每个探测点属于每个高斯分布的概率,包括:
24、s421、获取任一数据子集,数据子集包括n′个探测点,令m=0。
25、s422、判断m是否大于或等于预先设定值,若是,则执行s426;若否,则执行s423。
26、s423、对每个探测点pi,计算探测点属于第k类高斯分布的后验概率如下式(3)所示:
27、
28、其中,
29、
30、式中,pi表示第i个探测点,m表示迭代的次数,k表示设定的高斯分布数量,表示第m次迭代时的第k个高斯分量的占分量总和的权重,lk(pi)表示先验概率,σk表示方差,dk(pi)表示从第i个探测点pi到第k根管道的距离,k表示数据子集中的任一管道。
31、s424、计算如下式(5)(6)所示:
32、
33、
34、式中,#表示计数函数,mk表示对数据子集进行划分得到的包含nk个探测点的数据集,表示第i个探测点pi到第k根管道的距离的平均值。
35、s425、判断探测点分类是否改变,若是,则令m=m+1,转去执行s422;若否,则执行s426。
36、s426、输出探测点pi属于每个高斯分布的概率。
37、可选地,s4中的输出数据集l,如下式(7)所示:
38、l={(lc,rc,dc)|1≤c≤c} (7)
39、式中,lc表示输出数据集l中的第c根管道的管道方程,rc表示第c根管道的管道半径,dc表示第c根管道的管道深度,c表示埋设管道的数量。
40、另一方面,提供了一种基于雷达图像的地下管线图生成装置,该装置应用于基于雷达图像的地下管线图生成方法,该装置包括:
41、获取模块,用于获取探测区域内多个探测点的管道数据以及位置数据,根据管道数据以及位置数据构建数据集;其中,管道数据包括管道深度以及管道半径。
42、分类模块,用于根据管道数据对数据集进行分类,得到多个数据子集。
43、变换模块,用于对多个数据子集中的每个数据子集内的管道数据进行线性方程霍夫变换,得到每个数据子集的初始的管道数量和管道方程。
44、输出模块,用于根据每个数据子集的初始的管道数量和管道方程以及有限高斯混合聚类模型,得到输出数据集,进而得到探测区域的管道分布图。
45、可选地,数据集p,如下式(1)所示:
46、p={pi=(xi,yi,θi,di,ri)|1≤i≤n} (1)
47、式中,pi表示第i个探测点,xi表示从经度转换的第i个探测点的坐标,yi表示从纬度转换的第i个探测点的坐标,θi表示管道的预测方向,di表示第i个探测点处的管道深度,ri表示第i个探测点处的管道半径,n表示探测点数量。
48、可选地,分类模块,进一步用于:
49、根据管道深度以及管道半径,利用带噪声的基于密度的聚类算法dbscan对数据集进行聚类,得到多个数据子集。
50、可选地,变换模块,进一步用于:
51、s31、将多个数据子集中的每个数据子集的每个探测点映射到参数空间,且参数空间存在管道角度限制,生成多条曲线段。
52、其中,多条曲线段中的每条曲线段的极坐标方程,如下式(2)所示:
53、
54、式中,xi表示从经度转换的第i个探测点的坐标,yi表示从纬度转换的第i个探测点的坐标,θi表示管道的预测方向,ρ=xcosθ+ysinθ表示管道方程,θ是从原点到线段的垂直线与东方向之间的角度,n′表示数据子集的探测点数量。
55、s32、计算多条曲线段的交点,对交点进行聚类,得到聚类结果。
56、s33、根据聚类结果中每个类的质心的值确定每个数据子集的初始的管道方程的参数,根据聚类结果的类数确定每个数据子集的初始的管道数量。
57、可选地,输出模块,进一步用于:
58、s41、设定每个数据子集包括k个高斯分布,每个高斯分布对应一个聚类簇。
59、s42、采用期望最大化em算法,估计每个高斯分布的参数,并最大化每个探测点属于每个高斯分布的概率。
60、s43、根据每个探测点属于每个高斯分布的概率,将探测点划分到对应的聚类簇中,进而得到输出数据集。
61、可选地,输出模块,进一步用于:
62、s421、获取任一数据子集,数据子集包括n′个探测点,令m=0。
63、s422、判断m是否大于或等于预先设定值,若是,则执行s426;若否,则执行s423。
64、s423、对每个探测点pi,计算探测点属于第k类高斯分布的后验概率如下式(3)所示:
65、
66、其中,
67、
68、式中,pi表示第i个探测点,m表示迭代的次数,k表示设定的高斯分布数量.表示第m次迭代时的第k个高斯分量的占分量总和的权重,lk(pi)表示先验概率,σk表示方差,dk(pi)表示从第i个探测点pi到第k根管道的距离,k表示数据子集中的任一管道。
69、s424、计算如下式(5)(6)所示:
70、
71、
72、式中,#表示计数函数,mk表示对数据子集进行划分得到的包含nk个探测点的数据集,表示第i个探测点pi到第k根管道的距离的平均值。
73、s425、判断探测点分类是否改变,若是,则令m=m+1,转去执行s422;若否,则执行s426。
74、s426、输出探测点pi属于每个高斯分布的概率。
75、可选地,s4中的输出数据集l,如下式(7)所示:
76、l={(lc,rc,dc)|1≤c≤c} (7)
77、式中,lc表示输出数据集l中的第c根管道的管道方程,rc表示第c根管道的管道半径,dc表示第c根管道的管道深度,c表示埋设管道的数量。
78、另一方面,提供一种地下管线图生成设备,所述地下管线图生成设备包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现如上述基于雷达图像的地下管线图生成方法中的任一项方法。
79、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述基于雷达图像的地下管线图生成方法中的任一项方法。
80、本发明实施例提供的技术方案带来的有益效果至少包括:
81、本发明实施例中,采用的地下管道图生成的输入与输出数据格式以及基于深度和半径信息的管道数据分类有效地避免了现有方法中不同类型管道被错误地连接在一起的情况。
82、本发明提出的方法通过对各个探测点管道的方向进行限定并将传统霍夫变换升级为线性方程霍夫变换,确定区域内的管道数目和初始管道方程,管道和定位误差都被考虑在内,这提高了方法在不同环境下的鲁棒性。
83、本发明采用的有限混合高斯聚类方法可以采用em算法来估计该模型的参数问题,进而对数据进行聚类分析。它提供了用简单的结构来模拟复杂密度函数的有效办法,可以用它对具有正态分布的数据进行聚类分析。它结合了参数模型的解析优势和非参数模型的灵活性能。聚类时,不同的数据来自不同的高斯分布,而且各个高斯分布总体之间相互独立。
- 还没有人留言评论。精彩留言会获得点赞!