一种高俯仰角保持能力的水下滑翔机优化设计方法
本发明属于水下航行器,尤其涉及一种高俯仰角保持能力的水下滑翔机优化设计方法。
背景技术:
1、水下滑翔机是海洋研究人员进行长时序、大范围海洋观测的自主无人平台。它们广泛应用于海洋科学研究、环境监测和资源勘探等领域。水下滑翔机通过搭载各种类型的传感器来获取海洋环境信息数据,部分任务传感器为获取准确的现场观测数据,提升数据获取质量,对水下滑翔机的俯仰角保持性能提出了更高的要求。首先,稳定的俯仰角保持性能对于提高数据质量至关重要。许多任务传感器在工作时需要水下滑翔机保持特定的姿态,以确保数据的准确性。例如,adcp和回声探测仪在测量过程中需要水下滑翔机保持恒定的俯仰角,以避免由于姿态变化引起的测量误差。此外,频繁的俯仰角调节,在消耗电池能量的同时,调节机构运动还会引起振动,干扰声学水听器、湍流剖面仪等传感器采样,降低观测数据质量,甚至数据失效。然而,在深海观测任务中,水下滑翔机面临的挑战更加严峻。由于海洋中垂向密度的不均匀性,水下滑翔机的净浮力会随着深度的变化而变化,这使得水下滑翔机难以在滑翔过程中维持恒定的俯仰角。海洋温度和密度随深度的非线性变化特性,使得水下滑翔机的俯仰角不可避免地发生渐变。特别是对于探测深度达到4000米的大深度水下滑翔机来说,这种俯仰角的变化会更加剧烈。
2、一般来说,水下滑翔机与传感器之间是固定连接的,二者的相对位置和姿态固定不变。这意味着当滑翔机的俯仰角变化时,传感器的测量角度也会随之改变,从而影响数据质量。为了应对这一问题,大深度水下滑翔机通常采用姿态调节单元和浮力调节单元来修正俯仰角的偏离。然而,随着探测深度的增加,频繁的姿态调节不仅会引起不必要的能源消耗,还会产生额外的噪声,干扰测量数据的准确性。
3、综上所述,提升大深度水下滑翔机在稳定滑翔过程中的俯仰角保持能力显得尤为重要,有必要对大深度水下滑翔机在稳定滑翔过程中的俯仰角保持能力进行优化设计。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种解决现有的水下滑翔机俯仰角保持方法存在耗能且对传感器工作性能产出负面影响的问题的高俯仰角保持能力的水下滑翔机优化设计方法。
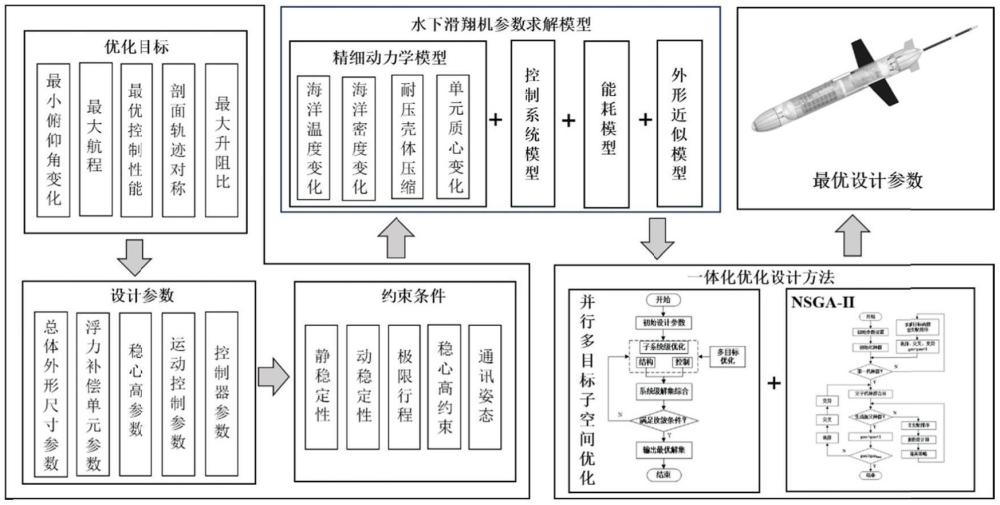
2、本发明是这样实现的,一种高俯仰角保持能力的水下滑翔机优化设计方法,其特征在于,包括以下步骤:确定水下滑翔机的设计指标和设计参数取值范围;根据设计指标,确定系统优化约束条件;建立水下滑翔机纵平面动力学模型、水下滑翔机纵平面俯仰角控制模型、水下滑翔机的水动力外形近似模型,水下滑翔机航程模型和能耗模型;对水下滑翔机系统进行学科划分,对设计参数进行灵敏度分析,建立结构子系统优化数学模型和控制子系统优化数学模型,并建立系统级优化数学模型;结合并行多目标子空间优化框架和nsga-ⅱ优化算法,根据实际需要从pareto解集中挑选合适的结果。
3、在上述技术方案中,优选的,所述设计参数包括水下滑翔机的总体外形尺寸参数、水下滑翔机结构参数和水下滑翔机控制参数。
4、在上述技术方案中,优选的,所述水下滑翔机的总体外形尺寸参数取值范围包括:艇体直径db∈[272,312],单位为mm;机翼位置ld∈[1600,1990],单位为mm;机翼后掠角θw∈[8,30],单位为°;机翼展长ls∈[1230,1710],单位为mm;机翼翼根长度lro∈[200,300],单位为mm;机翼翼梢长度lt∈[100,200],单位为mm。
5、在上述技术方案中,优选的,所述水下滑翔机结构参数的取值范围包括:浮力补偿单元总体积vl∈[0.015,0.02],单位为m3;浮力补偿单元关于水下滑翔机浮心的前后体积分配参数vp∈[0.4,0.6],无量纲;浮力补偿单元关于水下滑翔机浮心的前后位置布局参数ll1、ll2∈[0.9,1.2],单位为m;水下滑翔机稳心高参数hg∈[0.004,0.007],单位为m。
6、在上述技术方案中,优选的,水下滑翔机控制参数的取值范围包括:水下滑翔机俯仰角运动控制参数θd∈[-50,-20],θu∈[20,35],单位为°;水下滑翔机回油运动控制参数δvo,in∈[0.0011,0.00129]单位为m3;水下滑翔机排油运动控制参数δvo,out,单位为m3;控制器参数kd∈[-10,10],ki∈[-10,10],无量纲。
7、在上述技术方案中,优选的,所述结构子系统优化数学模型为:
8、find x1=[ld,ls,lro,lt,db,θw,vl,vp,ll1,ll2,hg]
9、min
10、fs1=max(|θd,max-θd,min|)+max(|θu,max-θu,min|)
11、fs2=-rg/eg
12、
13、
14、s.t.
15、
16、
17、gs3=re(λi)<0,i=1,2,3,4
18、
19、其中,
20、eg=ptt+er+eo
21、
22、
23、式中,θd,max和θd,min分别为水下滑翔机下潜过程中的最大俯仰角和最小俯仰角,θu,max和θu,min分别为水下滑翔机上浮过程中的最大俯仰角和最小俯仰角,rg为水下滑翔机单剖面航程,eg为水下滑翔机纵平面运动单剖面能耗,kd、kl和km为水下滑翔机阻力系数、升力系数和俯仰力矩系数,l为水下滑翔机机体长度,和分别为上浮和下潜阶段的平均垂直速度,xg,u为电池包位于后极限位置和上浮油量下的水下滑翔机重心位置,θmax,u为水下滑翔机的最大上浮俯仰角,λi为水下滑翔机纵平面系统矩阵的特征值。pt为与剖面运行时间相关的能耗,t为水下滑翔机单剖面运行时间,er为姿态调节单元能耗,eo为浮力调节单元能耗,pin为浮力系统水面回油功率,pout为浮力系统目标深度处排油功率,qo,in为水面回油的油流量,qo,out为目标深度处排油的油流量。
24、在上述技术方案中,优选的,所述控制子系统优化数学模型为:
25、控制子系统优化数学模型:
26、find x1=[ld,ls,vp,mr,hg,θd,θu,δvo,in,δvo,out0,kp,ki]
27、min
28、
29、s.t.
30、gc1=0.251-lru≤0
31、gc2=lrd-0.364≤0
32、其中,ed(t)和eu(t)为水下滑翔机下潜和上浮阶段控制系统响应时的俯仰角误差,lrd为水下滑翔机下潜时电池包相对浮心位置,lru为水下滑翔机上浮时电池包相对浮心位置。
33、在上述技术方案中,优选的,所述系统级优化数学模型为:
34、find
35、x=[ld,ls,lro,lt,db,θw,vl,vp,ll1,ll2,hg,θd,
36、θu,δvo,in,δvo,out0,mr,kp,ki]
37、min
38、f=[fs1,fs2,fs3,fs4,fc]
39、s.t.
40、g=[gs1,gs2,gs3,gs4,gc1,gc2]<0。
41、优点和效果
42、本技术方案所提出的高俯仰角保持能力的水下滑翔机优化设计方法具有以下优点和效果:
43、1、俯仰角控制精度的显著提升:该方法通过对水下滑翔机俯仰角保持能力有影响的关键结构和控制参数进行优化设计,使得在4000米深度的滑翔过程中,俯仰角变化量可以控制在3°以内。这样的高精度控制显著提升了深海水下滑翔机对各类传感器的适配性,确保传感器在稳定的姿态下获取更为准确的数据,提高了观测数据的质量和可靠性。
44、2、一体化优化设计避免局部最优:采用一体化优化设计方法,能够有效处理水下滑翔机结构和控制系统之间的强耦合作用。传统的先结构后控制的顺序优化方法常导致控制系统的优化停留在局部最优解,而通过一体化设计,结构和控制系统的优化都在全局优化范畴内进行。这样不仅能够避免局部最优的缺陷,还能实现结构和控制系统的协同优化,从而使滑翔机整体性能达到最佳状态。
45、3、减少能耗与噪声:
46、高俯仰角保持能力减少了滑翔机在深海中频繁进行姿态调节的需求,从而降低了能量消耗和附加噪声。这对于长时间、长距离的深海观测任务尤其重要,因为能量的节省直接关系到滑翔机的工作时间和观测范围,同时减少的噪声有助于获得更清晰的声学数据和其他传感器数据。
47、4、提高深海适应性和任务执行能力:
48、优化设计方法使得水下滑翔机能够更好地适应深海复杂环境中的变化,包括温度和密度的非线性变化。这种适应性提升了滑翔机在各种深海环境中执行任务的可靠性和效率,使其能够在更恶劣的海洋条件下保持稳定的性能。
49、5、普适性和应用广泛性:
50、该优化设计方法具有一定的普适性,不仅适用于特定型号的深海水下滑翔机,还可以应用于其他具有类似结构的深海水下滑翔机。这种普适性使得该方法可以广泛用于指导各种深海水下滑翔机的前期设计和后期优化工作,为不同应用需求提供高效的解决方案。
51、6、提升控制性能和航行性能:
52、通过全局优化设计,水下滑翔机的控制性能和航行性能得到了显著提升。高效的控制系统能够更精准地调节滑翔机的姿态,减少不必要的调整和误差,提高滑翔机的航行平稳性和路径精确度,使其在复杂的海洋环境中表现更为优异。
53、7、增强传感器数据的稳定性和准确性:
54、稳定的俯仰角保持性能确保传感器在最佳工作姿态下运行,减少因姿态变化引起的测量误差。这对于海洋观测任务中的流速剖面仪、湍流剖面仪和声学水听器等传感器尤为重要,能够显著提高观测数据的稳定性和准确性,为科学研究提供更可靠的数据支持。
55、综上所述,高俯仰角保持能力的水下滑翔机优化设计方法,通过对结构和控制参数的一体化优化,不仅实现了高精度的俯仰角控制,还提升了滑翔机的整体性能和任务执行能力,具有显著的能耗和噪声控制优势,并且具备广泛的应用普适性,为深海观测任务提供了强有力的技术支持。
- 还没有人留言评论。精彩留言会获得点赞!