仿真校验方法、装置、服务器、存储介质及程序产品与流程
本技术涉及自动驾驶,尤其涉及自动驾驶仿真测试,具体涉及一种仿真校验方法、装置、服务器、存储介质及程序产品。
背景技术:
1、自动驾驶的发展前景广阔,但同时也面临很多挑战,如技术瓶颈、安全法规、消费者接受度等。随着智驾愈发向规模化和场景复杂化(如城区场景、无人场景等)发展,对自动驾驶系统的要求也不断提高,以不断更新和优化自动驾驶系统,提高自动驾驶系统的性能和可靠性。而根据不同原因标注的问题场景(badcase)和极端场景(cornercase)的数据集,往往难以通过实车进行复现验证。
2、因此,如何对问题场景和极端场景的数据集进行验证,是亟待解决的问题。
技术实现思路
1、本技术提供一种仿真校验方法、装置、服务器、存储介质及程序产品,以解决相关技术中问题场景和极端场景的数据集,难以进行复现验证的技术问题。本技术的技术方案如下:
2、根据本技术涉及的第一方面,提供一种仿真校验方法,应用于服务器,包括:
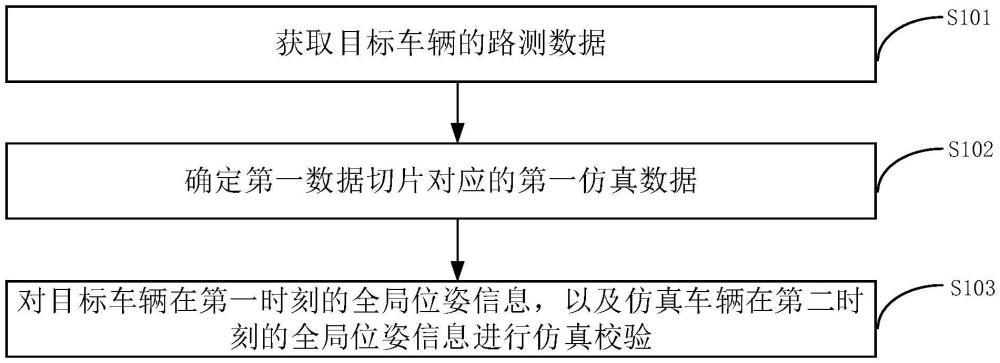
3、获取目标车辆的路测数据,路测数据中包含多个数据切片。
4、确定第一数据切片对应的第一仿真数据;第一数据切片为路测数据中的任一数据切片;第一数据切片至少包括以及目标车辆在第一时刻的全局位姿信息;第一仿真数据中至少包括仿真车辆在第二时刻的全局位姿信息;第二时刻位于第一时刻之后。
5、对目标车辆在第一时刻的全局位姿信息,以及仿真车辆在第二时刻的全局位姿信息进行仿真校验。
6、通过上述技术方案,可以将目标车辆的路测数据回灌至服务器的仿真软件中,服务器可以得到路测数据中的第一数据切片对应的包括仿真车辆在第二时刻的全局位姿信息的第一仿真数据,并对第一数据切片中标识的目标车辆的位姿信息和第一仿真数据中标识的仿真车辆的位姿信息进行仿真校验,以实现通过数据回灌的方式对问题场景和极端场景的数据集进行有效验证的目的。
7、在一种可能的实施方式中,该方法还包括:
8、在目标车辆在第一时刻的全局位姿信息,以及仿真车辆在第二时刻的全局位姿信息不一致的情况下,采用仿真车辆在第二时刻的全局位姿信息对路测数据进行更新。
9、通过上述技术方案,可以基于仿真车辆的全局位姿信息对路测数据进行更新,以在仿真软件不同的情况下,从软件层级对自车(即目标车辆)的行为进行修改,达到场景泛化的目的。
10、在一种可能的实施方式中,目标车辆在第一时刻的全局位姿信息包括第一位姿信息和第二位姿信息;第一位姿信息是指目标车辆的位姿信息;第二位姿信息是指目标场景中位于目标车辆预设范围内各个物体的位姿信息;仿真车辆在第二时刻的全局位姿信息包括第三位姿信息和第四位姿信息;第三位姿信息是指仿真车辆的位姿信息;第四位姿信息是指仿真场景中位于仿真车辆预设范围内各个物体的位姿信息。
11、在此基础上,服务器可以在第一位姿信息和第三位姿信息不一致的情况下,采用第三位姿信息对第一位姿信息进行更新;在第二位姿信息和第四位姿信息不一致的情况下,采用第四位姿信息对第二位姿信息进行更新。
12、上述技术方案可以对路测数据中目标车辆的位姿信息和目标场景中位于目标车辆预设范围内各个物体的位姿信息进行更新,以在仿真软件不同的情况下,对自车(即目标车辆)的行为进行修改,达到场景泛化的目的。
13、在一种可能的实施方式中,采用第三位姿信息对第一位姿信息进行更新,包括:基于第一时刻和目标时间差,确定目标时刻;在目标时刻与第二时刻相同,或,目标时刻在第二时刻之前的情况下,采用第三位姿信息对第一位姿信息进行更新。
14、其中,目标时间差是指将路测数据中的第一个数据切片包括的时刻和将路测数据输入仿真平台的时刻之间的时间差。
15、上述技术方案可以通过时间对齐的方式对路测数据中目标车辆的位姿信息进行更新,以在不同的场景下,实现场景泛化的目的的基础上,提高场景泛化的准确度。
16、在一种可能的实施方式中,确定第一数据切片对应的第一仿真数据,包括:将第二数据切片输入至仿真平台中,得到第一仿真数据;第二数据切片中的时刻位于第一时刻之前;或,基于第二数据切片对应的第二仿真数据,得到第一仿真数据。
17、上述技术方案提供了得到第一仿真数据的两种方式,可以有效提高本技术的可实现性。
18、在一种可能的实施方式中,第二仿真数据中包括第三时刻对应的控车指令以及仿真车辆在第三时刻的位姿信息,在此基础上,服务器可以基于第三时刻对应的控车指令和仿真车辆在第三时刻的位姿信息,确定仿真车辆在第二时刻的全局位姿信息。
19、在一种可能的实施方式中,仿真车辆在第二时刻的全局位姿信息包括第三位姿信息和第四位姿信息;第三位姿信息是指仿真车辆的位姿信息;第四位姿信息是指仿真场景中位于仿真车辆预设范围内各个物体的位姿信息。
20、在此基础上,服务器可以基于第三时刻对应的控车指令和仿真车辆在第三时刻的位姿信息,确定第三位姿信息;获取仿真场景中各个物体的位姿信息;每个物体的位姿信息为物体在全局坐标系下的位姿信息;基于第三位姿信息和仿真场景中各个物体的位姿信息,确定第四位姿信息。
21、上述技术方案提供了服务器确定第三位姿信息和第四位姿信息的具体实现方式,可以提高本技术的可实现性,此外,每个物体的位姿信息为物体在全局坐标系下的位姿信息,可以解决相关技术中坐标变换带来的失真问题,以及由于大规控模块策略、参数优化(算法修复),从而导致的数据无法直接使用的问题。
22、在一种可能的实施方式中,仿真场景中的物体至少包括仿真场景中处于静止状态的物体。
23、根据本技术提供的第二方面,提供一种仿真校验装置,该装置包括:获取模块、确定模块和校验模块,其中:
24、获取模块,用于获取目标车辆的路测数据;路测数据中包含多个数据切片。
25、确定模块,用于确定第一数据切片对应的第一仿真数据;第一数据切片为路测数据中的任一数据切片;第一数据切片至少包括以及目标车辆在第一时刻的全局位姿信息;第一仿真数据中至少包括仿真车辆在第二时刻的全局位姿信息;第二时刻位于第一时刻之后。
26、校验模块,用于对目标车辆在第一时刻的全局位姿信息,以及仿真车辆在第二时刻的全局位姿信息进行仿真校验。
27、在一种可能的实施方式中,该装置还包括更新模块,用于:在目标车辆在第一时刻的全局位姿信息,以及仿真车辆在第二时刻的全局位姿信息不一致的情况下,采用仿真车辆在第二时刻的全局位姿信息对路测数据进行更新。
28、在一种可能的实施方式中,目标车辆在第一时刻的全局位姿信息包括第一位姿信息和第二位姿信息;第一位姿信息是指目标车辆的位姿信息;第二位姿信息是指目标场景中位于目标车辆预设范围内各个物体的位姿信息;仿真车辆在第二时刻的全局位姿信息包括第三位姿信息和第四位姿信息;第三位姿信息是指仿真车辆的位姿信息;第四位姿信息是指仿真场景中位于仿真车辆预设范围内各个物体的位姿信息。
29、在此基础上,更新模块还用于:在第一位姿信息和第三位姿信息不一致的情况下,采用第三位姿信息对第一位姿信息进行更新;在第二位姿信息和第四位姿信息不一致的情况下,采用第四位姿信息对第二位姿信息进行更新。
30、在一种可能的实施方式中,更新模块还用于:基于第一时刻和目标时间差,确定目标时刻;目标时间差是指将路测数据中的第一个数据切片包括的时刻和将路测数据输入仿真平台的时刻之间的时间差;在目标时刻与第二时刻相同,或,目标时刻在第二时刻之前的情况下,采用第三位姿信息对第一位姿信息进行更新。
31、在一种可能的实施方式中,确定模块还用于:将第二数据切片输入至仿真平台中,得到第一仿真数据;第二数据切片中的时刻位于第一时刻之前;或,基于第二数据切片对应的第二仿真数据,得到第一仿真数据。
32、在一种可能的实施方式中,第二仿真数据中包括第三时刻对应的控车指令以及仿真车辆在第三时刻的位姿信息。确定模块还用于:基于第三时刻对应的控车指令和仿真车辆在第三时刻的位姿信息,确定仿真车辆在第二时刻的位姿信息。
33、在一种可能的实施方式中,仿真车辆在第二时刻的全局位姿信息包括第三位姿信息和第四位姿信息;第三位姿信息是指仿真车辆的位姿信息;第四位姿信息是指仿真场景中位于仿真车辆预设范围内各个物体的位姿信息。
34、确定模块还用于:基于第三时刻对应的控车指令和仿真车辆在第三时刻的位姿信息,确定第三位姿信息;获取仿真场景中各个物体的位姿信息;每个物体的位姿信息为物体在全局坐标系下的位姿信息;基于第三位姿信息和仿真场景中各个物体的位姿信息,确定第四位姿信息。
35、在一种可能的实施方式中,仿真场景中的物体至少包括仿真场景中处于静止状态的物体。
36、根据本技术提供的第三方面,提供一种服务器,包括:处理器;用于存储处理器可执行指令的存储器;其中,处理器被配置为执行指令,以实现上述第一方面及其任一种可能的实施方式的仿真校验方法。
37、根据本技术提供的第四方面,提供一种计算机可读存储介质,当计算机可读存储介质中的指令由服务器的处理器执行时,使得服务器能够执行上述第一方面中及其任一种可能的实施方式的仿真校验方法。
38、根据本技术提供的第五方面,提供一种计算机程序产品,计算机程序产品包括计算机指令,当计算机指令在服务器上运行时,使得服务器执行上述第一方面及其任一种可能的实施方式的仿真校验方法。
39、由此,本技术的上述技术特征具有以下有益效果:
40、(1)可以将目标车辆的路测数据回灌至服务器中,服务器可以得到路测数据中的第一数据切片对应的包括仿真车辆在第二时刻的全局位姿信息的第一仿真数据,并对第一数据切片中标识的目标车辆的位姿信息和第一仿真数据中标识的仿真车辆的位姿信息进行仿真校验,以实现通过数据回灌的方式对问题场景和极端场景的数据集进行有效验证的目的。
41、(2)上述技术方案可以对路测数据中目标车辆的位姿信息和目标场景中位于目标车辆预设范围内各个物体的位姿信息进行更新,以在不同的场景下,实现场景泛化的目的。
42、(3)上述技术方案可以通过时间对齐的方式对路测数据中目标车辆的位姿信息进行更新,以在不同的场景下,实现场景泛化的目的的基础上,提高场景泛化的准确度。
43、(4)提供了得到第一仿真数据的两种方式,可以有效提高本技术的可实现性。
44、(5)提供了服务器确定第三位姿信息和第四位姿信息的具体实现方式,可以提高本技术的可实现性,此外,每个物体的位姿信息为物体在全局坐标系下的位姿信息,可以解决相关技术中坐标变换带来的失真问题,以及由于大规控模块策略、参数优化(算法修复),从而导致的数据无法直接使用的问题。
45、需要说明的是,第二方面至第五方面中的任一种实现方式所带来的技术效果可参见第一方面中对应实现方式所带来的技术效果,此处不再赘述。
46、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!