一种基于机器视觉的分布式无人机巡检管理系统的制作方法
本发明涉及图像处理领域,具体是一种基于机器视觉的分布式无人机巡检管理系统。
背景技术:
1、随着无人机技术和机器视觉技术的不断进步,基于机器视觉的分布式无人机巡检管理系统在各个领域得到了广泛应用,对于桥梁、隧道、风力发电机等难以接近的结构,无人机能够通过高清摄像头进行拍摄,通过机器视觉技术对无人机所拍摄的视频图像进行处理,检测基础设施的裂缝、腐蚀等问题;传统的人工巡检方式效率低下、成本高昂,难以覆盖广泛的区域,而无人机巡检系统则可以高效、低成本地进行大范围、多角度的监控和检测,具有重要的现实意义和应用价值;
2、如何根据所规划的巡检路线控制无人机进行巡检拍摄,获得目标设施的彩色视频图像,对所获得的目标设施的彩色视频图像进行分析,并根据分析结果判断目标设施是否存在缺陷,是我们需要解决的问题,为此,现提供一种基于机器视觉的分布式无人机巡检管理系统。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种基于机器视觉的分布式无人机巡检管理系统。
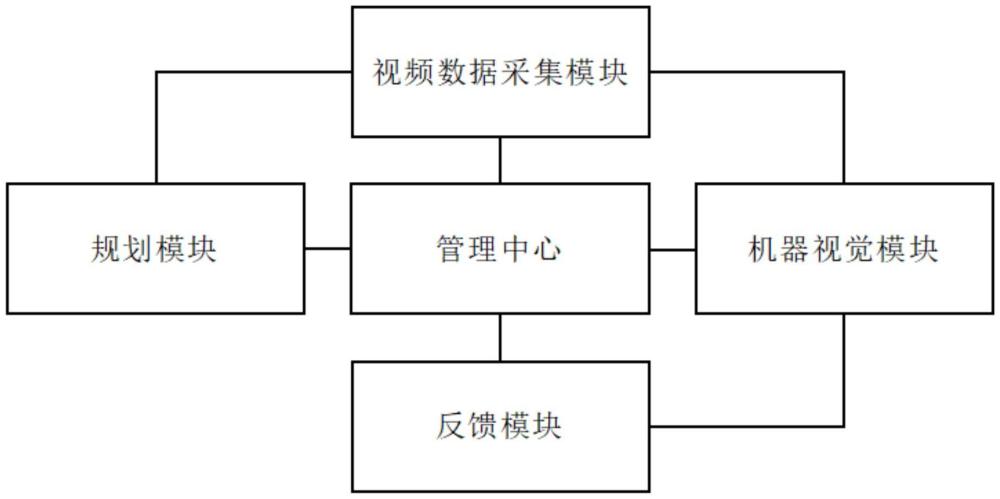
2、本发明的目的可以通过以下技术方案实现:一种基于机器视觉的分布式无人机巡检管理系统,包括管理中心,所述管理中心通信连接有规划模块、视频数据采集模块、机器视觉模块以及反馈模块;
3、所述规划模块用于划分巡检区域并根据所划分的巡检区域对无人机的巡检路线进行规划;
4、所述视频数据采集模块用于根据所规划的巡检路线控制无人机进行巡检拍摄,获得目标设施的彩色视频图像;
5、所述机器视觉模块用于对所获得的目标设施的彩色视频图像进行分析,并根据分析结果判断目标设施是否存在缺陷;
6、所述反馈模块用于根据判断结果进行反馈。
7、进一步的,所述规划模块划分巡检区域并根据所划分的巡检区域对无人机的巡检路线进行规划的过程包括:
8、将巡检区域划分为若干个四边形巡检子区域,获取四边形巡检子区域的四个顶点,将所获取的四个顶点按照顺时针顺序分别记为第一顶点、第二顶点、第三顶点以及第四顶点;
9、根据所获取的四个顶点获得第五顶点、第六顶点、第七顶点以及第八顶点;
10、为每个四边形区域分配一个无人机,无人机的巡检路线为从第一顶点到第二顶点,从第二顶点到第三顶点,从第三顶点到第四顶点,从第四顶点到第一顶点,从第一顶点到第五顶点,从第五顶点到第六顶点,从第六顶点到第七顶点,从第七顶点到第八顶点,从第八顶点到第五顶点。
11、进一步的,所述视频数据采集模块根据所规划的巡检路线控制无人机进行巡检拍摄的过程包括:
12、所述无人机内安装有高清摄像头,根据所规划的巡检路线发布巡检指令,所述巡检指令包括巡检路线,无人机根据巡检指令进行巡检,无人机沿巡检路线进行巡检的过程中,通过所安装的高清摄像头对目标设施进行拍摄,获得目标设施的彩色视频图像。
13、进一步的,所述机器视觉模块对所获得的目标设施的彩色视频图像进行分析的过程包括:
14、将所获得的目标设施的彩色视频图像进行分解,获得若干帧彩色视频图像,将所获得的若干帧彩色视频图像记为参照彩色视频图像,将参照彩色视频图像转换为参照灰度视频图像;
15、设置高斯滤波器,将参照灰度视频图像输入至高斯滤波器,高斯滤波器进行输出,获得去除噪声影响的参照灰度视频图像,将所获得的去除噪声影响的参照灰度视频图像记为标准灰度视频图像;
16、获取标准灰度视频图像中像素的梯度幅值和梯度方向,根据所获取的标准灰度视频图像中像素的梯度幅值和梯度方向对标准灰度视频图像中像素的梯度幅值进行幅值抑制;
17、设置第一梯度幅值阈值以及第二梯度幅值阈值,若进行幅值抑制后像素的梯度幅值大于第一梯度幅值阈值,则将像素标记为强边缘,若进行幅值抑制后像素的梯度幅值小于等于第一梯度幅值阈值,大于等于第二梯度幅值阈值,则将像素标记为弱边缘,若进行幅值抑制后像素的梯度幅值小于第二梯度幅值阈值,则将像素标记为非边缘;
18、获取被标记为弱边缘像素的上下左右和四个对角线方向的像素,若所获取的像素中,存在被标记为强边缘的像素,则将该被标记为弱边缘像素标记为强边缘,若所获取的像素中,不存在被标记为强边缘的像素,则将该被标记为弱边缘像素标记为非边缘;
19、获取标准灰度视频图像中被标记为强边缘的像素的数量,根据历史数据设置数量阈值范围;
20、若标准灰度视频图像中被标记为强边缘的像素的数量小于等于数量阈值范围中的最小值,则标准灰度视频图像对应的目标设施不存在缺陷,若标准灰度视频图像中被标记为强边缘的像素的数量大于数量阈值范围中的最小值,则标准灰度视频图像对应的目标设施存在缺陷。
21、进一步的,将参照彩色视频图像转换为参照灰度视频图像的过程包括:
22、获取参照彩色视频图像的像素以及像素的亮度值,所述参照彩色视频图像的像素的亮度值由红、绿以及蓝三个通道的值组成;
23、将红、绿以及蓝三个通道的值转换为灰色通道的值,转换完成后,参照彩色视频图像转换为参照灰度视频图像成功,参照灰度视频图像的像素的亮度值由灰色通道的值构成。
24、进一步的,获取标准灰度视频图像中像素的梯度幅值和梯度方向的过程包括:
25、设置水平卷积核以及垂直卷积核,将水平卷积核在标准灰度视频图像上滑动,对于每个位置,获取标准灰度视频图像中水平卷积核覆盖的区域内每个像素的亮度值与水平卷积核对应元素的乘积之和,将所获取的乘积之和记为像素的水平值;
26、将垂直卷积核在标准灰度视频图像上滑动,对于每个位置,获取标准灰度视频图像中垂直卷积核覆盖的区域内每个像素的亮度值与垂直卷积核对应元素的乘积之和,将所获取的乘积之和记为像素的垂直值;
27、根据所获取的像素的水平值和垂直值获得标准灰度视频图像中像素的梯度幅值和梯度方向。
28、进一步的,根据所获取的标准灰度视频图像中像素的梯度幅值和梯度方向对标准灰度视频图像中像素的梯度幅值进行幅值抑制的过程包括:
29、对所获得的标准灰度视频图像中像素的梯度方向进行划分,所述梯度方向包括第一梯度方向、第二梯度方向、第三梯度方向以及第四梯度方向;
30、若像素的梯度方向为第一梯度方向,则获取该像素的左右两个相邻像素的梯度幅值,若该像素的梯度幅值大于或等于该像素的左右两个相邻像素的梯度幅值,则保留该像素的梯度幅值,反之则将该像素的梯度幅值设置为零;
31、若像素的梯度方向为第二梯度方向,则获取该像素的右上和左下两个相邻像素的梯度幅值,若该像素的梯度幅值大于或等于该像素的右上和左下两个相邻像素的梯度幅值,则保留该像素的梯度幅值,反之则将该像素的梯度幅值设置为零;
32、若像素的梯度方向为第三梯度方向,则获取该像素的上下两个相邻像素的梯度幅值,若该像素的梯度幅值大于或等于该像素的上下两个相邻像素的梯度幅值,则保留该像素的梯度幅值,反之则将该像素的梯度幅值设置为零;
33、若像素的梯度方向为第四梯度方向,则获取该像素的左上和右下两个相邻像素的梯度幅值,若该像素的梯度幅值大于或等于该像素的左上和右下两个相邻像素的梯度幅值,则保留该像素的梯度幅值,反之则将该像素的梯度幅值设置为零。
34、进一步的,所述反馈模块根据判断结果进行反馈的过程包括:
35、若标准灰度视频图像对应的目标设施不存在缺陷,则不发出警报;
36、若标准灰度视频图像对应的目标设施存在缺陷,则判断标准灰度视频图像对应的目标设施的缺陷的严重程度,并发出对应的警报;
37、所述标准灰度视频图像对应的目标设施的缺陷的严重程度包括轻度缺陷、中度缺陷以及重度缺陷;
38、若标准灰度视频图像对应的目标设施的缺陷的严重程度为轻度缺陷,则发出橙色警报;
39、若标准灰度视频图像对应的目标设施的缺陷的严重程度为中度缺陷,则发出黄色警报;
40、若标准灰度视频图像对应的目标设施的缺陷的严重程度为重度缺陷,则发出红色警报。
41、与现有技术相比,本发明的有益效果是:划分巡检区域并根据所划分的巡检区域对无人机的巡检路线进行规划,根据所规划的巡检路线控制无人机进行巡检拍摄,获得目标设施的彩色视频图像,对所获得的目标设施的彩色视频图像进行分析,并根据分析结果判断目标设施是否存在缺陷,根据判断结果进行反馈,对目标设施进行了全方位的巡检拍摄,精准地判断了目标设施是否存在缺陷,从而预防了潜在的安全隐患,高效、低成本地对目标设施进行大范围、多角度的巡检拍摄,具有重要的现实意义和应用价值。
- 还没有人留言评论。精彩留言会获得点赞!