一种模块化教育机器人的教学质量控制方法及系统与流程
本发明涉及教育机器人,具体为一种模块化教育机器人的教学质量控制方法及系统。
背景技术:
1、教育机器人,也称为教学机器人,是随着人工智能、计算机技术等相关技术发展而兴起的一种专门用于教育活动的机器人。教育机器人是一种能够在人类教育过程中担任各种角色的机器人。它们可以用作教学辅助工具,提供个性化的学习体验和帮助,也可以在课堂环境中担任教育者的角色,与学生进行互动和指导。教育机器人通常搭载多种传感器和执行器,如声音识别、语音合成、图像识别、运动控制等,能够模拟各种教学场景和角色。
2、在授权公告号为cn11645338b的中国发明专利中,公开了一种ai智能教学机器人控制系统及方法,包括。该发明通过设置提问信息,提升学生的紧张度,使学生们的注意力能够集中,同时根据学生的应答信息的准确率能够测算当期的教学质量评分,且根据教学质量评分能生成相应的复习计划,再根据复习计划的执行时长实时调控后续教学视频的教学内容,使得教学视频的播放能够在教学计划之内完成播放,保证智能教学机器人投入使用之后,不仅能够保证提高学生的学习效果,还不会对教学计划造成影响。
3、结合以上申请及现有技术中的内容:
4、在将教育机器人应用于教学过程时,为了能够对教学质量进行提高,需要及时地获取到相应的教学反馈数据,结合教学反馈数据对机器人的教学内容及教学方式进行调整和优化,实现对教育机器人的教学质量控制;
5、但由于在不同的教学场景下,对教育机器人的教学内容及教学方式需求不同,导致对教育机器人的教学质量控制方式也存在差别,现有的教育机器人的教学质量控制方法中,主要侧重于对教学内容的更新优化,但教育机器人的教学质量不足的原因是多样性的,例如,在将教育机器人应用于互动式教学,存在个性化教学路径较多、不同教学内容间相似度较低的情形时,若只考虑对教学内容进行更新和优化,这种情况下,就可能会出现由于教育机器人的性能较差,导致对教学质量控制难以达到预期的情形,不能有效地提高教学质量。
6、为此,本发明提供了一种模块化教育机器人的教学质量控制方法及系统。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种模块化教育机器人的教学质量控制方法及系统,通过对教育机器人的各个模块进行测试,从若干个模块内筛选出故障模块;对教育机器人进行互动教学测试,使用训练后的反馈评分模型对教育机器人当前的互动教学进行打分,依据获取的评估分的分布,发出相应的控制指令;由用户的满意评分构建满意度,若满意度不足,对教育机器人的互动教学进行优化,或者依据若干个性能系数构建性能稳定度,若性能稳定度低于预期,对教育机器人进行性能升级。对互动教学效果形成改善,在对教育机器人进行控制时,对教育机器人的互动教学质量形成保障,从而解决了背景技术中提出的技术问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
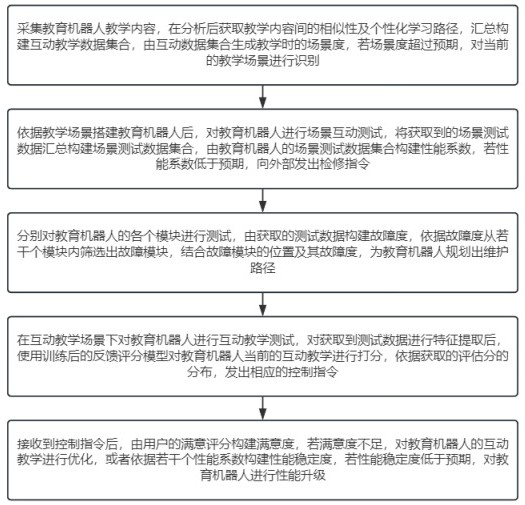
5、一种模块化教育机器人的教学质量控制方法,包括,采集教育机器人教学内容,在分析后获取教学内容间的相似性及个性化学习路径,汇总构建互动教学数据集合,由互动数据集合生成教学时的场景度,若场景度超过预期,对当前的教学场景进行识别;
6、依据教学场景搭建教育机器人后,对教育机器人进行场景互动测试,将获取到的场景测试数据汇总构建场景测试数据集合,由教育机器人的场景测试数据集合构建性能系数,若性能系数低于预期,向外部发出检修指令;
7、分别对教育机器人的各个模块进行测试,由获取的测试数据构建故障度,依据故障度从若干个模块内筛选出故障模块,结合故障模块的位置及其故障度,为教育机器人规划出维护路径;其中,为每个待测试模块的各项测试指标确定相应的合格标准值,依照如下方式获取故障度:
8、
9、权重系数:,;为测试模块的第i项测试数据值,为相应的合格标准值,为测试模块的测试指标数量;
10、在互动教学场景下对教育机器人进行互动教学测试,对获取到测试数据进行特征提取后,使用训练后的反馈评分模型对教育机器人当前的互动教学进行打分,依据获取的评估分的分布,发出相应的控制指令;
11、接收到控制指令后,由用户的满意评分构建满意度,若满意度不足,对教育机器人的互动教学进行优化,或者依据若干个性能系数构建性能稳定度,若性能稳定度低于预期,对教育机器人进行性能升级。
12、进一步的,为教育机器人限定教学区域,在教学区域对教学任务涉及的教学内容进行采集,通过相似性分析获取教学内容间的相似度,由相似度计算教学内容的多样度,查询获取教育机器人在教学区域内执行教学任务时累积的个性化学习路径,获取相应的路径数,将多样度与路径数汇总构建互动教学数据集合。
13、进一步的,对两种教学内容间的相似度做线性归一化处理,将对应的数据值映射至区间内,依照如下公式构建多样度:
14、
15、权重系数,,,且,为第i种教学内容与第j种教学内容间的相似度,为相似度均值,,相似度的个数。
16、进一步的,由互动教学数据集合构建教学时的场景度,其中,在多样度与路径数处于无量纲条件下时依照如下公式:
17、
18、权重系数:,,为常数修正系数;
19、若场景度超过场景阈值,使用训练后的场景识别模型对当前的教学场景进行识别,若当前为互动教学场景,向外部发出搭建指令。
20、进一步的,接收到搭建指令后,依据教育机器人的使用场景为教育机器人配置相应的模块,并为教育机器人集成教学内容;在选定的教学场景下对教育机器人进行交互功能测试,在各个测试节点上获取到相应的测试数据,将获取到的场景测试数据汇总构建场景测试数据集合;
21、由教育机器人的场景测试数据集合构建性能系数,其中,在响应速度及完成率处于无量纲条件下时,依照下公式:
22、
23、其中,为第 i个测试节点上的响应速度,为第 i个测试节点上的完成率,为权重系数,。
24、进一步的,接收到检修指令后,对各个模块分别进行性能测试,于各个测试节点上获取相应的模块测试数据,将获取到模块测试数据汇总后模块构建测试数据集合;由模块构建测试数据获取故障度,若故障度超过故障阈值,将对应的模块作为故障模块;
25、构建相应的机器人模型,将故障模块在机器人模型上标记,在获取到各个故障模块的位置信息及故障度后,由路径规划算法输出规划获取的维护路径。
26、进一步的,在互动教学场景下对教育机器人进行部署,为教育机器人设置包含若干个测试节点的测试周期,在各个测试节点上对教育机器人进行互动教学测试,获取到教育机器人的使用数据及反馈数据,将获取到的反馈数据汇总构建教学测试数据集合,对教学测试数据集合内的各项数据进行特征提取,获取若干个测试特征。
27、进一步的,训练获取反馈评分模型,由测试特征作为输入,使用训练后的反馈评分模型对教育机器人当前的互动教学情况进行打分并获取评估分;若评估分低于评分阈值,向外部发出满意度采集指令,若评估分高于评分阈值,向外部发出性能分析指令。
28、进一步的,接收到满意度采集指令后,于采集节点上对各个学生对教育机器人的满意程度进行采集,在打分后获取到相应的满意评分,在无量纲的条件下,由若干个满意评分构建相应的满意度,若满意度低于预设的满意阈值,向外部发出优化指令;其中,满意度的生成方式如下:
29、
30、其中,为权重系数,为第 i个学生的满意评分,为满意评分的目标值。
31、进一步的,接收到优化指令后,采集教学机器人的互动教学数据及用户对教育机器人教学内容的反馈数据,在进行特征提取后获取到相应的优化特征;以提高用户对教育机器人互动教学的满意度作为优化目标,使用多目标优化算法依据优化特征对教育机器人的互动教学进行优化。
32、进一步的,接收到性能分析指令后,在各个子周期内获取到教育机器人的性能系数,依据若干个性能系数构建性能稳定度,若性能稳定度低于预设的稳定阈值,向外部发出升级指令;其中,性能稳定度的生成方式如下:
33、
34、权重系数:,,为子周期的个数;为第i个子周期内的性能系数,为第i个子周期内性能系数的合格目标值,为性能系数的均值,为性能系数的方差。
35、一种模块化教育机器人的教学质量控制系统,包括,教学场景识别单元,采集教育机器人教学内容,在分析后获取教学内容间的相似性及个性化学习路径,汇总构建互动教学数据集合,由互动数据集合生成教学时的场景度,若场景度超过预期,对当前的教学场景进行识别;
36、教学场景测试单元,依据教学场景搭建教育机器人后,对教育机器人进行场景互动测试,将获取到的场景测试数据汇总构建场景测试数据集合,由教育机器人的场景测试数据集合构建性能系数,若性能系数低于预期,向外部发出检修指令;
37、故障分析单元,分别对教育机器人的各个模块进行测试,由获取的测试数据构建故障度,依据故障度从若干个模块内筛选出故障模块,结合故障模块的位置及其故障度,为教育机器人规划出维护路径;
38、互动测试单元,在互动教学场景下对教育机器人进行互动教学测试,对获取到测试数据进行特征提取后,使用训练后的反馈评分模型对教育机器人当前的互动教学进行打分,依据获取的评估分的分布,发出相应的控制指令;
39、教学控制单元,接收到控制指令后,由用户的满意评分构建满意度,若满意度不足,对教育机器人的互动教学进行优化,或者依据若干个性能系数构建性能稳定度,若性能稳定度低于预期,对教育机器人进行性能升级。
40、(三)有益效果
41、本发明提供了一种模块化教育机器人的教学质量控制方法及系统,具备以下有益效果:
42、1、依据场景度对教育机器人教学场景进行初步判断,在训练获取教学场景识别模型后,实现对教育机器人的教学场景是否为互动教学的判断,在确定出教育机器人的教学场景后,使教育机器人的各项功能和当前的教学场景间的匹配性更高。
43、2、对教育机器人展开互动性测试,通过获取到的互动性测试数据对教育机器人与当前教学场景的匹配性进行判断,确认教育机器人在当前教学场景下完成教学任务的能力。
44、3、由性能系数对教育机器人的性能进行综合性判断,若教育机器人的性能不足,可以对教育机器人进行针对性调整和改善,在对教育机器人进行控制时,使教育机器人可以更好地完成教育任务。
45、4、对各个模块进行性能数据采集,综合关联获取故障度,依据故障度判断各个模块是否存在故障,若存在故障,则可以将对应的故障确定为故障模块,在筛选出故障模块后,可以针对性地进行优化和提升。
46、5、结合各个模块的故障度及位置数据,规划获取的维护路径,有序地对各个模块进行维护,提高对教育机器人的维护效率和维护效果;对教育机器人的互动教学能力进行测试,由获取到测试数据判断教育机器人的互动教学能力以及执行教学任务的能力。
47、6、在获取到满意评分后构建相应的满意度,满意度不足,在采集到教育机器人教学互动数据、教学内容数据及反馈数据后,提取获取优化特征,通过对各个优化特征进行调整和改善,对互动教学效果形成改善,在对教育机器人进行控制时,对教育机器人的互动教学质量形成保障。
48、7、由性能稳定度对教育机器人的性能进行综合评估,若教育机器人的性能存在下降,对教育机器人的性能进行升级或维护,增加教育机器人的响应速度及交互能力,在将教育机器人应用于互动教学时,能够对教育机器人的互动教学质量形成有效控制。
- 还没有人留言评论。精彩留言会获得点赞!