高精度双目视觉测距方法与流程
本发明属于图像处理,具体涉及高精度双目视觉测距方法。
背景技术:
1、双目视觉测距技术已经成为计算机视觉领域中的重要研究方向,并在自动驾驶、机器人导航、三维重建等多个应用领域得到了广泛应用。双目视觉测距系统通过模拟人类双眼的视差原理,利用两个相机同时拍摄同一场景的图像,通过分析图像中对应点的视差来计算场景中各点的深度信息。这种方法具有非接触、实时性强、测量精度高等优点。然而,现有的双目视觉测距技术在实际应用中仍然面临许多挑战和问题,需要进一步研究和改进。
2、目前,双目视觉测距技术的研究主要集中在视差估计、特征提取、图像增强以及多重补偿等方面。现有技术主要包括以下几种方法:传统的双目视觉测距方法主要依赖于特征点的匹配,如sift、surf、orb等特征提取算法。这些算法通过提取图像中的显著特征点,并在左右图像中进行匹配,从而计算视差。然而,这些方法在处理纹理较少或重复纹理较多的场景时,往往会出现匹配错误,导致视差估计不准确。此外,这些方法对光照变化和噪声较为敏感,在实际应用中鲁棒性较差。块匹配方法通过在左右图像中搜索固定大小的窗口,找到相似度最高的窗口对,并计算它们之间的视差。这种方法简单直观,计算量较小,但在处理复杂场景时容易受到噪声和遮挡的影响,导致视差估计精度下降。常见的块匹配算法包括ssd(sum of squared differences)和sad(sum of absolute differences)等。近年来,基于优化的方法逐渐成为视差估计的主流。这些方法通过构建能量函数,表示视差估计的代价,并通过全局优化技术找到能量最小的视差分布。常见的优化方法包括图割(graphcuts)、信赖传播(belief propagation)和半全局匹配(semi-global matching)等。这些方法能够在一定程度上提高视差估计的精度和鲁棒性,但计算复杂度较高,难以满足实时应用的需求。随着深度学习技术的发展,基于卷积神经网络(cnn)的视差估计方法逐渐兴起。这些方法通过大规模数据训练,能够自动学习图像中的高级特征,实现高精度的视差估计。常见的深度学习模型包括dispnet、gc-net、psmnet等。这些方法在处理复杂场景和光照变化时表现出色,但对计算资源和训练数据的需求较高。
技术实现思路
1、鉴于此,本发明的主要目的在于提供高精度双目视觉测距方法,提出了一种高精度、鲁棒的双目视觉测距方法,显著提升了系统在复杂环境下的测距能力和适应性。
2、本发明采用的技术方案如下:高精度双目视觉测距方法,所述方法包括:
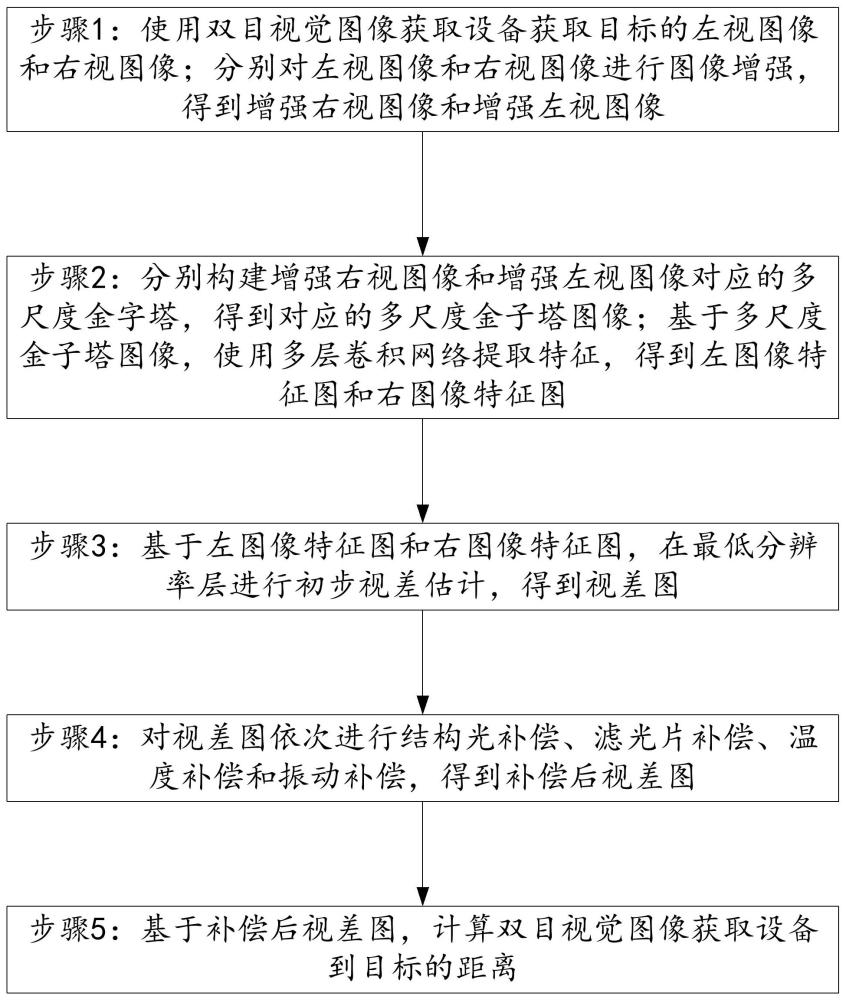
3、步骤1:使用双目视觉图像获取设备获取目标的左视图像和右视图像;分别对左视图像和右视图像进行图像增强,得到增强右视图像和增强左视图像;
4、步骤2:分别构建增强右视图像和增强左视图像对应的多尺度金字塔,得到对应的多尺度金字塔图像;基于多尺度金字塔图像,使用多层卷积网络提取特征,得到左图像特征图和右图像特征图;
5、步骤3:基于左图像特征图和右图像特征图,在最低分辨率层进行初步视差估计,得到视差图;
6、步骤4:对视差图依次进行结构光补偿、滤光片补偿、温度补偿和振动补偿,得到补偿后视差图;
7、步骤5:基于补偿后视差图,计算双目视觉图像获取设备到目标的距离。
8、进一步的,设左视图像为和右视图像为;使用如下公式,对左视图像和右视图像进行图像增强,得到增强右视图像和增强左视图像:
9、;
10、其中,为增强左视图像;为增强右视图像;代表像素坐标位置,为x轴坐标,为y轴坐标;为预设的增强系数;为左视图像的像素均值;为右视图像的像素均值;为左视图像的像素标准差;为右视图像的像素标准差。
11、进一步的,步骤2中的多尺度金字塔的层数的范围为4到8层;所述多尺度金字塔为相位一致性多尺度金字塔,在每一层,其方向数的范围为2到6。
12、进一步的,增强左视图像对应的多尺度金字塔图像使用如下公式计算得到:
13、;
14、其中,为增强左视图像对应的第层的多尺度金字塔图像;为增强左视图像对应的第层在第个方向的幅度金字塔图像,为增强左视图像对应的第层在第个方向的幅度金字塔图像;为增强左视图像对应的第层在第个方向的相位金字塔图像,表示对其每个像素做余弦运算;为增强左视图像对应的第层在第个方向的相位金字塔图像,表示对其每个像素做正弦运算;表示将图像视为一个矩阵,然后计算其行列式值;
15、增强右视图像对应的多尺度金字塔图像使用如下公式计算得到:
16、;
17、其中,为增强右视图像对应的第层的多尺度金字塔图像;为增强右视图像对应的第层在第个方向的幅度金字塔图像,为增强右视图像对应的第层在第个方向的幅度金字塔图像;为增强右视图像对应的第层在第个方向的相位金字塔图像,表示对其每个像素做余弦运算;为增强右视图像对应的第层在第个方向的相位金字塔图像,表示对其每个像素做正弦运算。
18、进一步的,设增强左视图像在第层的相位金字塔图像为,使用如下公式计算得到:
19、;
20、其中,为增强左视图像在第层的在y轴方向的相位梯度;为增强左视图像在第层的在x轴方向的相位梯度;为取模运算;为增强左视图像在第层的相位图像;
21、设增强右视图像在第层的相位金字塔图像为,使用如下公式计算得到:
22、;
23、其中,为增强右视图像在第层的在y轴方向的相位梯度;为增强右视图像在第层的在x轴方向的相位梯度;为取模运算;为增强右视图像在第层的相位图像;为标量加法。
24、进一步的,设增强左视图像在第层的相位金字塔图像为,使用如下公式计算得到:
25、;
26、其中,表示降采样操作;为高斯核;为卷积;为增强左视图像在第层的幅度图像;为增强左视图像在第层的在y轴方向的幅度梯度;为增强左视图像在第层的在x轴方向的幅度梯度;设增强右视图像在第层的相位金字塔图像为,使用如下公式计算得到:
27、;
28、其中,为增强右视图像在第层的幅度图像;为增强右视图像在第层的在y轴方向的幅度梯度;为增强右视图像在第层的在x轴方向的幅度梯度。
29、进一步的,基于多尺度金字塔图像,使用多层卷积网络提取特征,得到第层的左图像特征图为,第层的右图像特征图为;步骤3中使用如下公式,在最低分辨率层进行初步视差估计,得到视差图:
30、;
31、其中,为视差值,表示左图像特征图和右图像特征图在同一像素位置的位移差异;为窗口大小,表示在视差估计过程中用于计算差异的局部邻域,定义了在每个像素周围考虑的像素范围;为最低分辨率层,表示多尺度金字塔的分辨率最低的一层;为预设的权重系数;为第层的左图像特征图;为第层的右图像特征图。
32、进一步的,步骤4中通过预设的结构光补偿值、滤光片补偿值、温度补偿值和振动补偿值,分别与视差图进行标量加法运算,以实现对视差图依次进行结构光补偿、滤光片补偿、温度补偿和振动补偿,得到补偿后视差图。
33、进一步的,步骤5中基于补偿后视差图,得到视差值为,再使用如下公式,计算双目视觉图像获取设备到目标的距离:
34、;
35、其中,为双目视觉图像获取设备的焦距;为双目视觉图像获取设备中两个相机之间的基线距离。
36、采用以上技术方案,本发明产生了以下有益效果:本发明利用多尺度金字塔技术,将图像分解成多个不同分辨率的层次,使得图像的全局信息和局部细节都能被有效捕捉和处理。多尺度金字塔技术通过逐层降采样,生成一系列不同分辨率的图像层,能够在不同尺度下分析和处理图像信息。结合多层卷积神经网络(cnn),本发明能够从这些多尺度金字塔图像中提取出丰富的特征信息,包括边缘、纹理、形状等高级特征。这一组合方法的优势在于,卷积神经网络通过层层卷积和池化操作,能够自动学习和提取图像中的复杂特征,使得特征提取过程更加准确和鲁棒。多尺度金字塔提供了一个多层次的图像表示,使得系统在处理复杂场景时,能够兼顾不同尺度和分辨率的信息,提高了特征提取的效果和视差估计的精度。在视差估计过程中,本发明利用卷积神经网络提取的特征图进行匹配,采用在最低分辨率层进行初步视差估计的方法。这种方法能够显著减少计算量,提高计算效率,同时利用低分辨率图像的全局结构信息,减少了细节噪声的干扰,使得初步视差估计更加稳定和鲁棒。具体来说,通过在最低分辨率层进行视差估计,系统能够快速得到一个初步的视差图,为后续高分辨率层的细化处理提供良好的初始条件。视差估计过程中,利用特征图之间的匹配代价函数,结合绝对差值和加权平方差,确保视差值的计算更加精确和可靠。这个过程充分利用了多尺度分析和深度学习提取的特征,显著提升了视差估计的精度和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!