提前释放货位或工位状态的作业调度方法、系统和装置与流程
本发明涉及物料运输控制,特别涉及一种提前释放货位或工位状态的作业调度方法、系统和装置。
背景技术:
1、目前,各行各业都趋向于自动化,同时对货位和工位的使用,也逐渐重视,提升货位和工位利用率越来越高。为了提升工作效率,工厂结合agv机器人进行搬运。搬运货物时,需要对货位和工位进行管理。尤其对一些使用面积小,存在局限性的工厂,货位和工位布局受限,更需要大大的提高货位和工位的使用率,通过提升货位和工位的利用率来提升产能。在传统的作业调度方法中,当货位和工位上存在货物时,当货物从货位或者工位搬走后,才能进行再次使用,导致作业任务之间空隙时间过长;此外,当agv机器人距离货位较远时,需要花费很长的时间,生产作业节拍慢,作业效率低。
技术实现思路
1、本发明的目的是提供一种解决上述技术问题的提前释放货位或工位状态的作业调度方法。
2、本发明的另一目的是提供一种实现上述提前释放货位或工位状态的作业调度方法的提前释放货位或工位状态的作业调度系统。
3、本发明的另一目的是提供一种实现上述提前释放货位或工位状态的作业调度方法的作业调度装置。
4、为此,本发明技术方案如下:
5、一种提前释放货位或工位状态的作业调度方法,步骤如下:
6、1)仓储管理系统向仓库控制系统发布物料自起点货位或工位搬运至终点货位或工位的物料搬运作业任务,并对物料搬运作业任务的状态进行标记,更新起点货位或工位和终点货位或工位的使用状态;
7、2)仓库控制系统接收到来自仓储管理系统的物料搬运作业任务,向空闲状态的agv机器人发布物料搬运作业任务;
8、3)agv机器人接收到仓库控制系统分配的任务并启动;agv机器人的启动信号反馈至仓库控制系统,并经由仓库控制系统传送至仓储管理系统,仓储管理系统更新物料搬运作业任务的状态;
9、4)agv机器人行走至到达起点货位或工位处,其托举机构托举起点货位或工位上的物料,并将托举信号反馈至仓库控制系统,再经由仓库控制系统传送至仓储管理系统;仓储管理系统更新物料搬运作业任务的状态,并更新起点货位或工位的使用状态,使起点货位或工位提前释放,以用于仓储管理系统的再次分配使用;
10、5)agv机器人自起点货位或工位行走至终点货位或工位,在该过程中,情况1):若agv机器人在到达终点货位或工位前,无其它agv机器人在终点货位或工位处作业,则agv机器人直接执行物料放置到指定货位或工位上;情况2):若agv机器人在即将到达终点货位或工位时,有其他agv机器人在终点货位或工位处作业,则agv机器人暂停执行物料搬运作业任务并保持间距等待,直至其它agv机器人离开,再继续执行物料搬运作业任务;
11、6)agv机器人到达终点货位或工位处,其托举机构将托举的物料放置在终点货位或工位后收回,并将托举取消信号反馈至仓库控制系统,再经由仓库控制系统传送至仓储管理系统;仓储管理系统更新物料搬运作业任务的状态,并更新终点货位或工位的使用状态。
12、进一步地,仓储管理系统对货位或工位使用状态的标记方法为:
13、当货位或工位上放置有物料,且未处于物料搬运作业任务中,则该货位或工位标记为“满&解锁”;
14、当货位或工位上放置有物料,且处于物料搬运作业任务中,则该货位或工位标记为“满&锁”;
15、当货位或工位上未放置有物料,且未处于物料搬运作业任务中,则该货位或工位标记为“空&解锁”;
16、当货位或工位上未放置有物料,且处于物料搬运作业任务中,则该货位或工位标记为“空&锁”。
17、该仓储管理系统对货位或工位使用状态的标记方法能够通过对处于不同使用状态和任务执行状态的货位或工位进行标记,使仓储管理系统在发布物料搬运作业任务时,不会出现对货位或工位重复分配任务的问题。
18、进一步地,仓储管理系统对物料搬运作业任务的标记方法为:
19、当仓储管理系统将物料搬运作业任务发布给仓库控制系统,物料搬运作业任务的状态为statu=0;
20、当仓储管理系统收到来自仓库控制系统发送的agv机器人启动信号反馈,物料搬运作业任务的状态为statu=1;
21、当仓储管理系统收到来自仓库控制系统发送的agv机器人托举信号反馈,物料搬运作业任务的状态为statu=2;
22、当仓储管理系统收到来自仓库控制系统发送的agv机器人托举取消信号反馈,物料搬运作业任务的状态为statu=3。
23、该仓储管理系统对物料搬运作业任务的标记方法能够对物料搬运任务的实施状态进行持续监管,可以及时发现任务状态存在长时间未更新的问题,并有利于后续及时确认问题原因。
24、进一步地,在步骤5)的情况2)中,在步骤5)的情况2)中,agv机器人利用其上设置的距离探测装置探测到其它agv机器人后,暂停执行物料搬运作业任务,并与其它agv机器人按照设定的安全距离阈值保持间距。
25、进一步地,在步骤6)中,仓储管理系统更新物料搬运作业任务的状态后,仓库控制系统更新agv机器人的工作状态为空闲,agv机器人自动回到等待位置等待或充电、或原地接收仓库控制系统新的物料搬运任务指令。
26、在实际应用中,该提前释放货位或工位状态的作业调度方法可应用于多情景下的物料转移作业中,物料具体可以指货物、设备、工装等;例如:应用于仓库内不同货位上货物的往来搬运,也可应用于操作工位上对不同操作设备或器械的往来搬运。
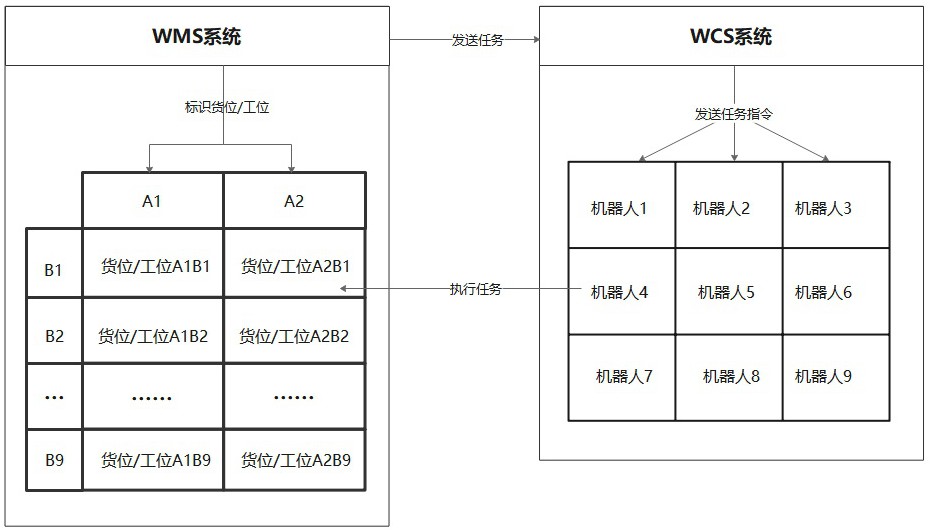
27、一种提前释放货位或工位状态的作业调度系统,包括:
28、仓储管理系统,其用于发布物料搬运作业任务指令,并根据仓库控制系统传送的agv机器人的反馈信号,更新物料搬运作业任务的状态、以及货位或工位的使用状态;
29、仓库控制系统,其用于接收仓储管理系统的发布的任务,并调度处于闲置状态的agv机器人执行任务指令,以及将自agv机器人接收的反馈信号反馈至仓储管理系统;
30、多台agv机器人,各台agv机器人接收仓库控制系统发布的任务指令并执行,并在任务执行过程中依次向仓库控制系统反馈启动信号、托举信号和托举取消信号;在每台agv机器人上还设置有用于避障的距离探测装置,使agv机器人在行走过程中探测到前方路径上有其它agv机器人时暂停任务,并保持安全距离阈值距离;其中,距离探测装置可以采用但不限于雷达探测装置、激光探测装置等。
31、一种作业调度装置,包括存储器和处理器;其中,处理器通过调用存储器中存储的控制程序,以执行上述提前释放货位或工位状态的作业调度方法。
32、与现有技术相比,该提前释放货位或工位状态的作业调度方法、系统和装置能够在作业过程中,减少agv机器人的等待时间,提升货位或者工位的使用频率,提升节拍,提高产能;尤其对局限性较小的工厂来说,能大大解决货位和工位不足情况,同时能得到很好的利用,大幅提高作业效率,降低时间成本。
- 还没有人留言评论。精彩留言会获得点赞!