一种ORB特征点提取方法、装置、设备及泊车方法与流程
本发明实施例涉及图像处理,具体涉及一种orb特征点提取方法、装置、设备及泊车方法。
背景技术:
1、在视觉即时定位与建图技术(visual simultaneous localization andmapping,以下简称vslam)中,orb特征点由于其提取和描述子计算过程较为轻便被广泛应用于vslam前端的特征点提取模块中,并服务于后续的匹配和定位、建图等模块。
2、当前vslam中采用的orb特征点提取方式一般分为两类模块的处理方式:cpu模块和非cpu模块,而非cpu模块大多数为借助dsp模块进行提取。cpu模块的orb特征点提取存在提取速度较慢且占用较大cpu计算资源的不足,在此前提下,市面上产生了通过dsp模块进行orb特征点提取的方案。
3、dsp模块的orb特征点提取包含大量重复计算的orb特征点,提取过程在dsp模块的计算耗时相比cpu模块有显著提升。尽管现有的dsp端已存在集成好的orb特征点提取方案,可以从输入的图像中提取到若干orb特征点,但现有的dsp模块的orb特征点提取方案仍存在所提取的orb特征点在图像上分布不均匀,且在图像纹理较为明显的区域会聚集大量的提取到的orb特征点,使得有效提取的区域减小,vslam的前端感知能力下降的问题。另外,现有的dsp模块的orb特征点提取方案还存在在计算描述子时直接对图像的原灰度图进行描述子计算,使得描述子不够平滑,从而降低后续帧间关键点匹配的成功率。且未考虑原图像存在的掩膜区域,从而将图像的掩膜区域内的点也纳入提取到的特征点集中,造成后续的误匹配等情况。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种orb特征点提取方法、装置、设备及泊车方法,解决了现有的dsp模块的orb特征点提取方案存在所提取的orb特征点在图像位置分布不均匀化、描述子突变过大及未考虑掩膜区域等问题。
2、根据本发明实施例的一个方面,提供了一种orb特征点提取方法,包括以下步骤:
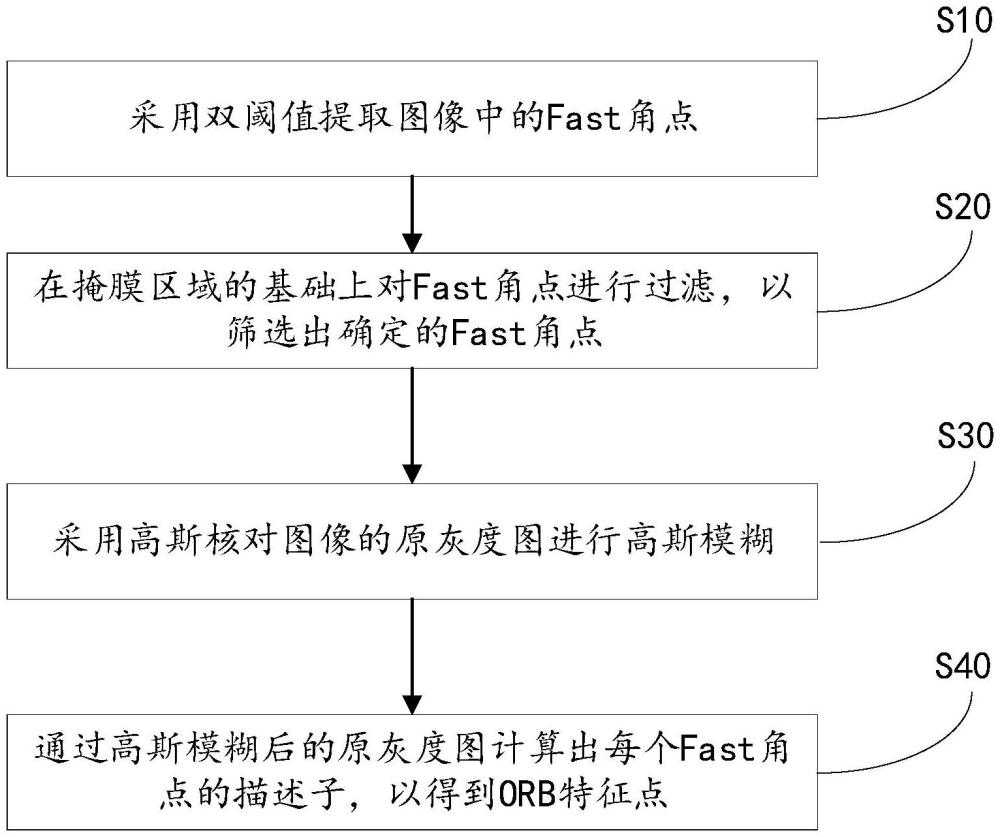
3、采用双阈值提取图像中的fast角点;
4、在掩膜区域的基础上对fast角点进行过滤,以筛选出确定的fast角点;
5、采用高斯核对图像的原灰度图进行高斯模糊;
6、通过高斯模糊后的原灰度图计算出每个fast角点的描述子,以得到orb特征点。
7、在一些可选的实现方式中,确定fast角点的筛选,具体包括步骤:
8、在掩膜区域的基础上对每层图像金字塔进行网格划分,筛选出有效网格数;
9、获取每个有效网格的fast角点数以及fast评分阈值;
10、据每个有效网格的fast角点数和fast评分阈值筛选出确定的fast角点。
11、在一些可选的实现方式中,提取图像中的fast角点,具体包括步骤:
12、设置双阈值中的高阈值和低阈值;
13、通过低阈值提取图像中的fast角点;
14、其中,所述低阈值为fast角点的周围邻近像素差阈值,所述高阈值为在有效网格筛选过程中首要获取的角点阈值。
15、在一些可选的实现方式中,有效网格的筛选,具体包括步骤:
16、剔除掩膜区域外的fast角点,将剩余的fast角点划分到若干网格中;
17、去除没有fast角点的空网格,得到有效网格数。
18、在一些可选的实现方式中,每个有效网格的fast评分阈值的计算,具体包括:
19、遍历有效网格内的每个fast角点的fast角点评分;
20、统计有效网格中的fast角点评分分别大于双阈值中的高阈值和低阈值的fast角点数;
21、对分别大于高阈值和低阈值的fast角点评分取平均值;
22、通过所述评分平均值计算有效网格的fast评分阈值。
23、在一些可选的实现方式中,有效网格的fast评分阈值的计算,具体包括:
24、当大于高阈值的fast角点评分的评分平均值大于等于网格的有效fast角点数阈值时,有效网格的fast评分阈值通过以下公式计算:
25、
26、当大于低阈值的fast角点评分的评分平均值小于网格的有效fast角点数阈值时,有效网格的fast评分阈值通过以下公式计算:
27、
28、其中,scoregrid_th表示有效网格的fast评分阈值,scoregrid_higj表示大于高阈值的fast角点评分的评分平均值,coregrid_low表示大于低阈值的fast角点评分的评分平均值,q_high表示高阈值,q_low表示低阈值,gridhigh_n表示有效网格中大于高阈值的fast角点评分的fast角点数,gridlow_n表示有效网格中大于低阈值的fast角点评分的fast角点数,ngrid_th表示网格的有效fast角点数阈值。
29、在一些可选的实现方式中,确定的fast角点的筛选,具体包括:
30、提取fast角点数小于等于有效fast角点数阈值的有效网格;
31、将有效网格中的fast角点评分小于等于有效网格的fast评分阈值的fast角点提取为确定的fast角点。
32、在一些可选的实现方式中,对图像的原灰度图进行高斯模糊,具体包括:
33、计算各确定的fast角点质心向量的角度;
34、根据各确定的fast角点质心向量的角度生成高斯核;
35、采用两层5×5的高斯核对图像的原灰度图进行高斯模糊。
36、根据本发明实施例的另一个方面,提供了一种orb特征点提取装置,包括:
37、获取模块,用于采用双阈值提取图像中的fast角点;
38、筛选模块,用于在掩膜区域的基础采用网格化对fast角点进行过滤,以筛选出确定的fast角点;
39、计算模块,用于根据确定的fast角点采用高斯核对图像的原灰度图进行高斯模糊,并通过高斯模糊后的原灰度图计算出每个fast角点的描述子,以得到fast角点的orb特征点。
40、根据本发明实施例的又一个方面,提供了一种orb特征点提取设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
41、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行如上述所述的orb特征点提取方法的操作。
42、根据本发明实施例的又一个方面,提供了一种泊车方法,包括以下步骤:
43、采用上述所述的orb特征点提取方法获取当前帧图像中的orb特征点;
44、基于所述orb特征点建立泊车地图;
45、在泊车过程中,加载建立的泊车地图;
46、实时更新车辆当前位置对应的地图参考帧;
47、采用上述所述的orb特征点提取方法提取当前场景的orb特征点;
48、将所述地图参考帧与提取的当前场景的orb特征点进行匹配;
49、根据所述地图参考帧与提取的当前场景的orb特征点之间的匹配信息对在路线内进行定位;
50、根据定位的位置信息对车辆进行控制。
51、与现有技术相比,本发明具有以下优点:
52、本发明提供的一种orb特征点提取方法,通过双阈值法和网格均匀化筛选出确定的fast角点,解决了特征点在图像位置分布不均和未考虑掩膜区域的问题;然后采用高斯核对图像的原灰度图进行高斯模糊,通过高斯模糊后的原灰度图计算出每个fast角点的描述子,以得到orb特征点,解决了描述子平滑程度不足的问题。通过本发明提供的orb特征点提取方法获取的orb特征点,具有均匀化程度更高,描述子变化更平滑等特点。
53、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!