一种土层掘进刀具损伤状态检测方法与流程
本发明涉及图像处理,具体涉及一种土层掘进刀具损伤状态检测方法。
背景技术:
1、盾构机刀具作为隧道土层掘进工程中的重要工具之一,主要用于开挖地下隧道。需要及时检测刀具表面的损伤状态,以保证盾构机刀具的生产质量;现有技术通常利用点云数据对盾构机刀具表面的刀具信息进行采集表征,从而通过点云数据技术对盾构机刀具进行损伤检测。
2、现有技术通常利用pl-icp算法在通过处理点云数据,从而对盾构机运行状态进行识别与控制的过程中,会受到振动等环境因素以及不同作业环段的掌子面土质结构的影响,导致盾构机刀具上不同部位的点云数据中不同数据点存在不同程度的干扰信息,难以判断盾构机刀具的受损情况,降低了检测结果的准确性。
技术实现思路
1、本发明提供一种土层掘进刀具损伤状态检测方法,以解决现有的问题:pl-icp算法在通过处理点云数据,从而对盾构机运行状态进行识别与控制的过程中,会受到振动等环境因素以及不同作业环段的掌子面土质结构的影响,导致盾构机刀具上不同部位的点云数据中不同数据点存在不同程度的干扰信息,难以判断盾构机刀具的受损情况。
2、本发明的一种土层掘进刀具损伤状态检测方法采用如下技术方案:
3、包括以下步骤:
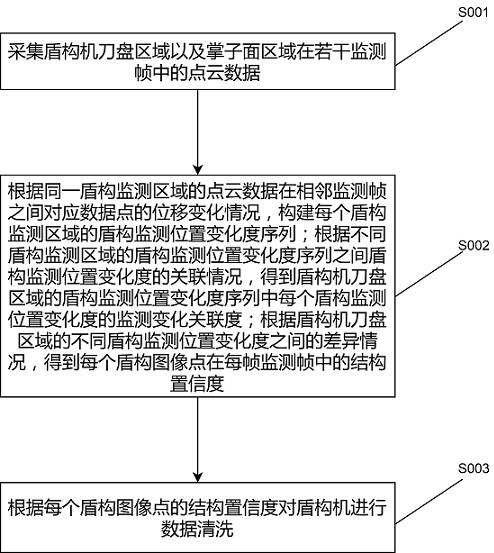
4、采集盾构机刀盘区域以及掌子面区域在若干监测帧中的点云数据,所述点云数据包含多个具有三维空间位置信息的盾构图像点,每个盾构图像点在每帧监测帧中对应一个数据点;
5、将盾构机刀盘区域以及掌子面区域均记为一个盾构监测区域,根据同一盾构监测区域的点云数据在相邻监测帧之间对应数据点的位移变化情况,构建每个盾构监测区域的盾构监测位置变化度序列;根据不同盾构监测区域的盾构监测位置变化度序列之间盾构监测位置变化度的关联情况,得到盾构机刀盘区域的盾构监测位置变化度序列中每个盾构监测位置变化度的监测变化关联度;根据盾构机刀盘区域的不同盾构监测位置变化度之间的差异情况,得到每个盾构图像点在每帧监测帧中的结构置信度;
6、根据每个盾构图像点的结构置信度对盾构机进行数据清洗。
7、优选的,所述根据同一盾构监测区域的点云数据在相邻监测帧之间对应数据点的位移变化情况,构建每个盾构监测区域的盾构监测位置变化度序列,包括的具体方法为:
8、预设一个窗口预设边长;对于任意一个盾构监测区域,将盾构监测区域的任意一个盾构图像点记为目标盾构图像点;对于盾构监测区域的任意一帧监测帧,将目标盾构图像点在监测帧中对应的数据点记为目标盾构图像点的目标盾构监测数据点;以目标盾构监测数据点为中心,窗口大小的窗口区域记为目标盾构监测数据点的邻域数据点区域;获取目标盾构图像点的所有目标盾构监测数据点的邻域数据点区域;
9、对于目标盾构图像点的任意两个相邻的目标盾构监测数据点,在这两个目标盾构监测数据点中,将第一个目标盾构监测数据点记为参考盾构监测数据点,将第二个目标盾构监测数据点记为标记盾构监测数据点;根据参考盾构监测数据点与标记盾构监测数据点之间对应邻域数据点区域内数据点的变化差异距离,得到标记盾构监测数据点的邻域变动程度;
10、根据邻域变动程度,获取盾构监测区域在每帧监测帧中的盾构监测位置变化度;
11、将盾构监测区域的所有盾构监测位置变化度构成的序列,记为盾构监测区域的盾构监测位置变化度序列。
12、优选的,所述根据参考盾构监测数据点与标记盾构监测数据点之间对应邻域数据点区域内数据点的变化差异距离,得到标记盾构监测数据点的邻域变动程度,包括的具体方法为:
13、
14、式中,表示标记盾构监测数据点的邻域变动程度;表示参考盾构监测数据点的邻域数据点区域中所有数据点的数量;表示标记盾构监测数据点的邻域数据点区域中所有数据点的数量;表示参考盾构监测数据点的邻域数据点区域中第个数据点,与标记盾构监测数据点的邻域数据点区域中第个数据点之间的欧氏距离。
15、优选的,所述根据邻域变动程度,获取盾构监测区域在每帧监测帧中的盾构监测位置变化度,包括的具体方法为:
16、将所有目标盾构图像点的标记盾构监测数据点的邻域变动程度的累加和,记为盾构监测区域在监测帧中的监测帧邻域变动累加和;对盾构监测区域在所有监测帧中的监测帧邻域变动累加和进行线性归一化,将归一化后的每个监测帧邻域变动累加和记为盾构监测位置变化度。
17、优选的,所述根据不同盾构监测区域的盾构监测位置变化度序列之间盾构监测位置变化度的关联情况,得到盾构机刀盘区域的盾构监测位置变化度序列中每个盾构监测位置变化度的监测变化关联度,包括的具体方法为:
18、预设一个盾构监测位置变化度的参考数量;将盾构机刀盘区域的盾构监测位置变化度序列中任意一个盾构监测位置变化度记为目标盾构监测位置变化度,将目标盾构监测位置变化度左侧个盾构监测位置变化度以及目标盾构监测位置变化度右侧个盾构监测位置变化度共同构成的数据段,记为目标盾构监测位置变化度的邻域参考数据段;
19、获取目标盾构监测位置变化度的邻域参考数据段中每个盾构监测位置变化度的盾构区域关联值;
20、将盾构机刀盘区域的盾构监测位置变化度序列中任意一个盾构监测位置变化度,记为第一目标盾构监测位置变化度;根据第一目标盾构监测位置变化度的邻域参考数据段内整体盾构监测位置变化度的盾构区域关联值,得到第一目标盾构监测位置变化度的监测变化关联因子;
21、在盾构机刀盘区域的盾构监测位置变化度序列中,将第一个盾构监测位置变化度的监测变化关联因子与第二个盾构监测位置变化度的监测变化关联因子的乘积,记为第二个盾构监测位置变化度的监测变化关联度;将第二个盾构监测位置变化度的监测变化关联度与第三个盾构监测位置变化度的监测变化关联因子的乘积,记为第三个盾构监测位置变化度的监测变化关联度;将第三个盾构监测位置变化度的监测变化关联度与第四个盾构监测位置变化度的监测变化关联因子的乘积,记为第四个盾构监测位置变化度的监测变化关联度;以此类推,获取每个盾构监测位置变化度的监测变化关联度。
22、优选的,所述获取目标盾构监测位置变化度的邻域参考数据段中每个盾构监测位置变化度的盾构区域关联值,包括的具体方法为:
23、将目标盾构监测位置变化度的邻域参考数据段中任意一个盾构监测位置变化度记为参考盾构监测位置变化度;将参考盾构监测位置变化度在盾构机刀盘区域的盾构监测位置变化度序列中的序号记为目标序号;将掌子面区域的盾构监测位置变化度序列中序号与目标序列相同的盾构监测位置变化度,记为参考盾构监测位置变化度的对照盾构监测位置变化度;将盾构机刀盘区域的盾构监测位置变化度序列与掌子面区域的盾构监测位置变化度序列输入dtw动态时间规整算法中,获取对照盾构监测位置变化度与参考盾构监测位置变化度的dtw距离,并记为参考盾构监测位置变化度的盾构区域关联值。
24、优选的,所述根据第一目标盾构监测位置变化度的邻域参考数据段内整体盾构监测位置变化度的盾构区域关联值,得到第一目标盾构监测位置变化度的监测变化关联因子,包括的具体方法为:
25、
26、式中,表示第一目标盾构监测位置变化度的监测变化关联因子;表示第一目标盾构监测位置变化度的邻域参考数据段;表示第一目标盾构监测位置变化度的邻域参考数据段中第个盾构监测位置变化度盾构区域关联值;表示以自然常数为底的指数函数。
27、优选的,所述根据盾构机刀盘区域的不同盾构监测位置变化度之间的差异情况,得到每个盾构图像点在每帧监测帧中的结构置信度,包括的具体方法为:
28、在盾构机刀盘区域的盾构监测位置变化度序列中,将任意两个不同的盾构监测位置变化之间差值的绝对值作为距离度量,对所有盾构监测位置变化度进行层次聚类,得到若干聚类簇;
29、根据盾构机刀盘区域在第个盾构监测位置变化度所属聚类簇内不同盾构监测位置变化度之间的差异情况,以及盾构机刀盘区域的第个盾构图像点在第帧监测帧中的邻域变动程度,得到盾构机刀盘区域的第个盾构图像点在第帧监测帧中的结构置信因子;
30、获取盾构机刀盘区域的所有盾构图像点在第帧监测帧中的结构置信因子,对所有的结构置信因子进行线性归一化,将归一化后的每个结构置信因子记为结构置信度。
31、优选的,所述根据盾构机刀盘区域在第个盾构监测位置变化度所属聚类簇内不同盾构监测位置变化度之间的差异情况,以及盾构机刀盘区域的第个盾构图像点在第帧监测帧中的邻域变动程度,得到盾构机刀盘区域的第个盾构图像点在第帧监测帧中的结构置信因子,包括的具体方法为:
32、
33、式中,表示盾构机刀盘区域的第个盾构图像点在第帧监测帧中的结构置信因子;表示盾构机刀盘区域的所有监测帧的数量;表示第个数据点在第帧监测帧中的邻域变动程度;表示盾构机刀盘区域的第个盾构监测位置变化度所属聚类簇中所有盾构监测位置变化度的数量;表示第个盾构监测位置变化度所属聚类簇中第个盾构监测位置变化度;表示第个盾构监测位置变化度所属聚类簇中所有盾构监测位置变化度的均值;表示预设的超参数。
34、优选的,所述根据每个盾构图像点的结构置信度对盾构机进行数据清洗,包括的具体方法为:
35、预设一个结构置信度阈值;若盾构机刀盘区域的第个盾构图像点在第帧监测帧中的结构置信度小于,将盾构机刀盘区域的第个盾构图像点在第帧监测帧中的数据点,替换为盾构机刀盘区域的第个盾构图像点在第帧监测帧中的数据点。
36、本发明的技术方案的有益效果是:根据同一盾构监测区域的点云数据在相邻监测帧之间对应数据点的位移变化情况,构建每个盾构监测区域的盾构监测位置变化度序列;根据盾构监测位置变化度序列之间盾构监测位置变化度的关联情况,得到每个盾构监测位置变化度的监测变化关联度;根据盾构机刀盘区域的不同盾构监测位置变化度之间的差异情况,得到每个盾构图像点在每帧监测帧中的结构置信度;根据每个盾构图像点的结构置信度对盾构机进行数据清洗;其中监测变化关联度用于描述盾构机在实际作业的过程中的点云数据越随着地质变化而缓慢变化的程度,使点云数据更好地表示受地质变化干扰的关系;结构置信度用于描述监测帧中对应图像结构变化剧烈程度,使点云数据中对应三维位置信息的变化关系更明确;本发明清洗了点云数据中受到较大干扰的数据点,提高了检测结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!