一种海上雷达目标与AIS目标的融合系统及方法与流程
本发明涉及雷达,具体涉及一种海上雷达目标与ais目标的融合系统及方法。
背景技术:
1、雷达是海上导航和监视的常用设备,具有信息更新速度快的优势,但是其不能提供目标的身份和目的地等静态信息,而ais(自动识别系统)可以定期接收装运编号、船位、速度和航向等信息,其只能从其他船只接收到信息更新速度慢,雷达和ais各有其优点及缺点,现有技术中,将雷达目标和ais目标进行融合从而提高船舶导航精度也是非常多的。如专利文献1(cn117556376a)其涉及基于多源数据融合的船舶动态轨迹预测及跟踪方法,其将雷达系统和ais目标数据进行融合,有效避免了仅应用ais数据进行轨迹预测的局限性,另外采用基于深度学习和贝叶斯优化相结合的算法对船舶动态轨迹进行预测,很好的实现了雷达目标和ais目标的融合,但是其并没有考虑到雷达系统有时候会因为雷达表面脏污、灰尘或者水珠而使得其采集的数据有误,其并没有对雷达数据进行修正;再如专利文献2(cn117761661a)其涉及激光雷达调节装置,其包括安装盒及活塞筒,在安装盒内部设置了激光雷达,活塞筒与安装盒连接,能够将气源通入安装盒主体内,同时活塞筒的动作也能够驱动清洁机构的清洁板动作,能够对探测窗口进行清洁,进一步保证激光雷达探测的精度,虽然能够提高激光雷达的探测精度,但是清洁板的动作是只有在进行气压调节时进行的,而且探测窗口相对于安装盒主体也是不能运动的,在探测窗口处如果有污物,其探测的数据也是不准确的;又如专利文献3(cn115359121a)其涉及一种激光雷达遮挡判断与清洗方法及装置,针对激光雷达视窗存在污物时,通过将激光雷达采集的原始点云数据转换为深度图,通过深度图的阴影部分确定激光雷达表面需要清洗的位置,然后控制相应喷头进行清洗,从而针对性的清洁雷达,保证激光雷达的正常工作和遮挡物的及时高效清洗,但是其对于被遮挡物遮挡的其他待采集的对象的数据则未采集到,有可能因为激光雷达表面视镜上的污物的遮挡而使得采集数据失真。
2、综上,现有技术中虽然针对海上雷达目标与ais目标的数据进行了融合,但是融合数据中并未考虑到雷达采集的数据存在数据失真的问题,更未考虑到在激光雷达进行数据采集时其由于视镜表面可能存在脏污、灰尘或者水珠而使得采集的数据有误的问题,而且现有技术中,对于激光雷达虽然存在了清洗设备,但是其考虑的还是如何能够保证激光雷达能够进行正常的数据采集工作,也没有考虑到视镜可能遮挡激光雷达采集数据的准确性的问题,基于此,本发明提供了一种针对更精准的雷达数据进行处理的、能够很好的保证激光雷达表面洁净的海上雷达目标与ais目标的融合系统及方法。
技术实现思路
1、本发明所要解决的技术问题是提供一种海上雷达目标与ais目标的融合系统,所述融合系统包括:
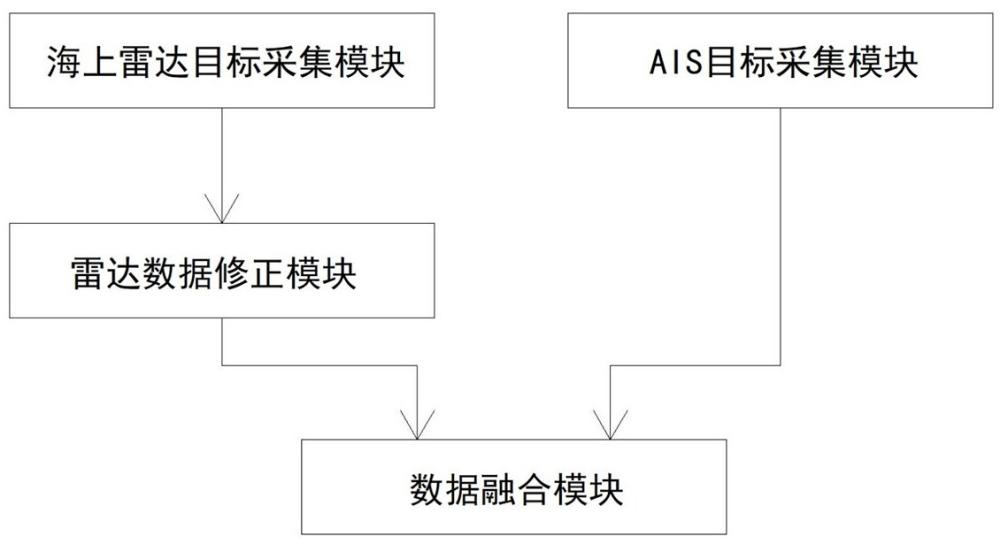
2、海上雷达目标采集模块、雷达数据修正模块、ais目标采集模块和数据融合模块,所述海上雷达目标采集模块通过激光雷达采集船舶数据,得到雷达原始数据,所述ais目标采集模块获得船舶ais数据,得到船舶自动识别系统原始数据,所述雷达原始数据经过雷达数据修正模块的修正后,与所述船舶自动识别系统原始数据经过数据融合模块的融合后得到雷达与ais系统的融合数据;
3、所述海上雷达目标采集模块包括旋转底盘及封闭箱体,封闭箱体的内侧设置有激光雷达,封闭箱体的一侧开设有开口筒,开口筒内活动安装有转动透镜,激光雷达透过所述转动透镜发射及接收激光采集船舶数据,形成点云数据;
4、所述雷达数据修正模块包括处理器、转动驱动源、清洗模块及发送模块,所述转动驱动源、清洗模块和发送模块均与所述处理器连接,所述处理器在检测出转动透镜上一位置处存在透镜污物时,能够控制转动驱动源动作带动转动透镜运动,使得所述透镜污物移动到另一位置处,精准找出透镜污物的位置,然后将透镜污物的点云数据剔除,最后处理器将剔除透镜污物的点云数据通过发送模块传递给数据融合模块,所述清洗模块能够在转动透镜返回时将透镜污物清理干净。
5、优选地,在开口筒内壁的左右两端分别安装有螺旋导管一和螺旋导管二,所述螺旋导管一和螺旋导管二均包括第一直行段和第二螺旋段,所述转动透镜包括透镜主体和安装环座,所述透镜主体安装于所述安装环座的内部,所述安装环座的左右两侧分别设置有左容纳槽和右容纳槽,所述左容纳槽用于容纳所述螺旋导管二,所述右容纳槽用于容纳所述螺旋导管一,在所述安装环座的上下两端分别设置有吹气管一和吹气管二,所述吹气管一和吹气管二形成所述清洗模块。
6、优选地,所述转动驱动源包括分别固定设置于所述安装环座内侧左右两端的固定杆一和固定杆二,在固定杆一的上端和固定杆二的上端转动连接有驱动环,在驱动环的上端左右两侧分别固定有驱动缸一和驱动缸二,所述驱动缸一和驱动缸二均固定连接于开口筒的内侧。
7、优选地,所述固定杆一和固定杆二的上端均设置有滑动块,所述驱动环的下端开设有燕尾槽,所述滑动块卡入所述燕尾槽内,所述螺旋导管一和螺旋导管二均包括管主体及开设于管主体侧壁的若干单向开口阀,管主体的一端连接有供气泵,所述单向开口阀开设于靠近所述安装环座的一侧壁内,所述单向开口阀使得管主体为一封闭状态,而在转动透镜向外沿着螺旋导管一和螺旋导管二滑动时,所述单向开口阀打开,管主体内的气体进入由转动透镜和封闭箱体形成的密闭空间内。
8、优选地,所述吹气管一和吹气管二均包括直管一和直管二,所述直管一的左端穿过所述安装环座的内侧,所述直管一的右端处连接直管二,所述直管一和直管二形成l型结构,所述直管二的出气管端正对所述透镜主体的外侧,在所述吹气管一和吹气管二的内端均设置有单向阀,该单向阀在转动透镜向外滑动时处于封闭状态,在转动透镜向内滑动时处于打开状态,在转动透镜向内滑动返回时,将封闭箱体内的气体从直管二的末端喷出,将转动透镜外侧的透镜污物清洗干净。
9、优选地,所述第一直行段位于开口筒靠近封闭箱体的一侧处,所述第二螺旋段位于开口筒远离封闭箱体的另一侧处,所述第一直行段和第二螺旋段在开口筒内连续延伸。
10、优选地,记激光雷达的原点为o,以封闭箱体沿着开口筒的方向记为y轴,封闭箱体的另一横向方向记为x轴,封闭箱体的竖直方向记为z轴,以透镜主体的圆心记为o1,建立直角坐标系,直角坐标系中的x轴平行于x轴,z轴平行于z轴,y轴和y轴同心,记圆心o和o1的距离为s,则在距离激光雷达的s±0.5mm处若存在透镜污物的反射光强度大于第一预设光强度,则初步确定转动透镜上存在透镜污物,记透镜污物与圆心o的连线在xoy平面相对于x轴的夹角为第一偏斜角,透镜污物与圆心o的连线在z轴方向上与xoy平面的夹角为第二偏斜角,透镜污物与圆心o1的连线与x轴的夹角为第三偏斜角,则此时第一偏斜角大小为β,第二偏斜角大小为γ,第三偏斜角大小为α1,使得透镜主体以一定速度旋转一定角度,使得第三偏斜角大小变为α2,则在下一帧点云数据采集时,若在第一偏斜角大小为β1、第二偏斜角大小为γ1处,且在距离激光雷达的s±0.5mm处的反射光强度依然大于第一预设光强度,则确定存在透镜污物,并将距离激光雷达的s±0.5mm处、第一偏斜角大小为β1、第二偏斜角大小为γ1、第三偏斜角大小为α2采集到的点云数据清除,在上一帧于第一偏斜角大小为β,第二偏斜角大小为γ,第三偏斜角大小为α1,距离激光雷达的s±0.5mm处采集到的点云数据清除。
11、优选地,记激光雷达的原点为o,以封闭箱体沿着开口筒的方向记为y轴,封闭箱体的另一横向方向记为x轴,封闭箱体的竖直方向记为z轴,以透镜主体的圆心记为o1,建立直角坐标系,直角坐标系中的x轴平行于x轴,z轴平行于z轴,y轴和y轴同心,记圆心o和o1的距离为s,则在距离激光雷达的s±0.5mm处如果存在透镜污物的反射光强度大于第一预设光强度,则初步确定转动透镜上存在透镜污物,记透镜污物与圆心o的连线在xoy平面相对于x轴的夹角为第一偏斜角,透镜污物与圆心o的连线在z轴方向上与xoy平面的夹角为第二偏斜角,透镜污物与圆心o1的连线与x轴的夹角为第三偏斜角,则此时第一偏斜角大小为β,第二偏斜角大小为γ,第三偏斜角大小为α1,转动透镜能够相对于所述激光雷达向右以一定速度滑动,记向右滑动后的转动透镜的圆心为o2,圆心o1和o2的距离为s2,此时,第一偏斜角大小为β2,第二偏斜角大小为γ2,第三偏斜角大小为α1,若在距离激光雷达的±0.5mm处的反射光强度依然大于第一预设光强度,则确定存在透镜污物,并将距离激光雷达的±0.5mm处、第一偏斜角大小为β2、第二偏斜角大小为γ2、第三偏斜角大小为α1采集到的点云数据清除,在上一帧于第一偏斜角大小为β,第二偏斜角大小为γ,第三偏斜角大小为α1,距离激光雷达的s±0.5mm处采集到的点云数据清除,将在第一偏斜角大小为β1、第二偏斜角大小为γ1、第三偏斜角大小为α1采集到的点云数据弥补为上一帧清除的点云数据。
12、优选地,使得转动透镜在滑移了所述距离s2后,还进行了一定角度的旋转,使得透镜污物与x轴的夹角为α3,此时,第一偏斜角大小为β3,第二偏斜角大小为γ3,若在距离激光雷达的±0.5mm处的反射光强度依然大于第一预设光强度,则确定存在透镜污物,则将距离激光雷达的±0.5mm处、第一偏斜角大小为β3、第二偏斜角大小为γ3、第三偏斜角大小为α3采集到的点云数据清除,并将此时于第一偏斜角大小为β2,第二偏斜角大小为γ2采集到的点云数据弥补为上一帧清除的点云数据。
13、另外,还包括一种海上雷达目标与ais目标的融合方法,所述融合方法包括如下步骤:
14、一、海上船舶雷达数据采集:
15、通过所述海上雷达目标采集模块采集船舶数据,形成点云数据;
16、二、雷达数据修正:
17、在距离激光雷达的s±0.5mm处若存在透镜污物的反射光强度大于第一预设光强度,则初步判定存在透镜污物,使得转动驱动源动作,带动转动透镜沿着开口筒向外滑动,气体由螺旋导管一和螺旋导管二进入封闭箱体内,喷向转动透镜的内侧,在转动透镜运动一定距离后,若是在特定区域仍然检测到距离激光雷达的s±0.5mm处如果存在透镜污物的反射光强度大于第一预设光强度,则判定转动透镜上存在透镜污物,将采集到的透镜污物的点云数据删除,达到雷达数据修正;另外,使得转动透镜沿着开口筒向内滑动回位,此时封闭箱体内的气体由吹气管一和吹气管二向外吹出,将转动透镜外侧的透镜污物清除;
18、三、ais船舶数据采集:
19、通过ais目标采集模块采集船舶数据,完成ais船舶数据采集;
20、四、雷达船舶数据和ais船舶数据融合:
21、坐标转换:
22、以地心坐标系为系统坐标系,先采用高斯-克吕格投影法将ais船舶数据转换为直角坐标系下的坐标,再将雷达的极坐标系下的数据转换为直角坐标系;将两者相加,获取ais系统的目标数据和雷达的目标数据在系统坐标系下的坐标值之和;
23、时间同步:
24、以雷达的采样时刻为系统的采样基准时刻,通过采用插值法计算出ais系统对应于雷达的采样时刻的目标位置信息;
25、航迹关联和数据融合:
26、采用置信度法进行航迹关联,再采用基于最小方差原则的加权平均法对雷达和ais系统数据进行融合。
27、由于上述技术方案运用,本发明与现有技术相比具有下列优点:
28、1、本发明的海上雷达目标与ais目标的融合系统,其针对采集的雷达数据,考虑到激光雷达采集数据时受视镜表面的光洁度影响较大,且在海上雷达数据采集时其视镜表面存在污物的概率较大,由此,本发明在采集到海上雷达数据后,还额外设置了雷达数据修正模块,所述雷达数据修正模块在检测到视镜表面存在污物时,使得视镜为可移动方式,如此,能够改变污物在视镜上的位置,由此能够测得两次或多次的预设位置处的反射光强度,能够更加准确的进行污物的判断;
29、2、本发明的视镜设置为转动透镜,由转动驱动源进行驱动运动,为了适应视镜的运动,使得封闭箱体内还设置了能够对封闭箱体内部进行气体补充的螺旋导管一和螺旋导管二,螺旋导管一和螺旋导管二除了进行气体补充外,其还能够对转动透镜的运动进行导向,螺旋导管一和螺旋导管二配合转动驱动源的动作,实现了转动透镜的运动,同时,雷达数据修正模块还包括了清洗模块,该清洗模块能够适应视镜运动时,封闭箱体内的密闭空间的大小变化,来实现对转动透镜外的污物进行清洁,其能够保证激光雷达的工作的同时,也能够提高激光雷达的工作效率;
30、3、本发明的雷达数据修正模块在判断出视镜的表面存在污物时,能够将雷达采集到的点云数据进行删除,从而能够避免污物对雷达采集到的正常数据的影响,另外,由于污物的存在,其很有可能遮挡相同位置处其他需要检测的有用数据的遮挡,如有可能在污物的背后存在需要采集的船舶的其他重要点云数据被遮挡,在此种情况下,由于本发明的视镜设置为了转动视镜,其在不同时刻时,污物相对于激光雷达的位置是不同的,在不同时刻污物相对于激光雷达在不同位置,由此,能够使用下一帧的点云数据来弥补上一帧的清除的点云数据;
31、4、另外,为了能够使得对于污物的判断更为准确,使得螺旋导管一和螺旋导管二均包括了第一直行段和第二螺旋段,由此,视镜上的污物相对于激光雷达先进行了横向滑移,然后又进行了一边旋转一边滑移的动作,此时,污物的移动路径即为比较特定的路径,此时,其他待采集数据与该污物数据移动的路径相同的概率很低,因此,能够更加精准的判断出视镜表面处的污物,而且由于封闭箱体内存在灰尘等的概率较低,污物一般都是存在于视镜外侧的,由此,本发明在转动透镜处设置了吹气管一和吹气管二,吹气管一和吹气管二的内部设置了单向阀,只有在转动透镜回位,封闭箱体内的密闭空间变小时,空气才能从吹气管一和吹气管二处吹出,将污物清除,如此,可以不耽误激光雷达的后续工作;
32、5、最后,为了适应转动透镜能够在开口筒内侧顺着螺旋导管一和螺旋导管二运动,使得转动驱动源设置为了包括驱动环的结构,驱动环能够在驱动缸一和驱动缸二的驱动下进行滑动,另外在驱动环的下端还设置了一圈的燕尾槽,与安装环座连接的固定杆一和固定杆二的上端设置滑块,滑块卡入燕尾槽内,从而在驱动缸一和驱动缸二伸出时,透镜主体能够通过安装环座相对于所述开口筒进行滑动及转动,另外驱动环的外径大于透镜主体的外径,从而避免了驱动环遮挡激光雷达的工作范围。
- 还没有人留言评论。精彩留言会获得点赞!