车辆检测模型的训练方法、交通状态感知方法及系统与流程
本发明涉及车辆检测,尤其是一种车辆检测模型的训练方法、交通状态感知方法及系统。
背景技术:
1、目前,传统基于遥感影像的交通状态感知方法通常是基于多时相遥感影像实现车辆检测,然后再基于检测到多时相车辆数据实现交通状态的感知,然而,该种方式在进行车辆检测时的检测精度和效率不佳,且由于获取多时相遥感影像的难度较大和成本高昂,该种方式对交通状态感知的实用性不尽人意。
2、因此,现有技术存在的问题还亟需解决和优化。
技术实现思路
1、本发明的目的在于至少一定程度上解决相关技术中存在的技术问题之一。
2、为此,本发明实施例的一个目的在于提供一种车辆检测模型的训练方法、交通状态感知方法及系统,其中,该方法通过提供一种车辆检测模型,可以提高车辆检测的检测精度和检测效率,以及降低交通状态感知的成本,提高交通状态感知的实用性。
3、为了达到上述技术目的,本技术实施例所采取的技术方案包括:
4、第一方面,本技术实施例提供了一种车辆检测模型的训练方法、交通状态感知方法及系统,包括:
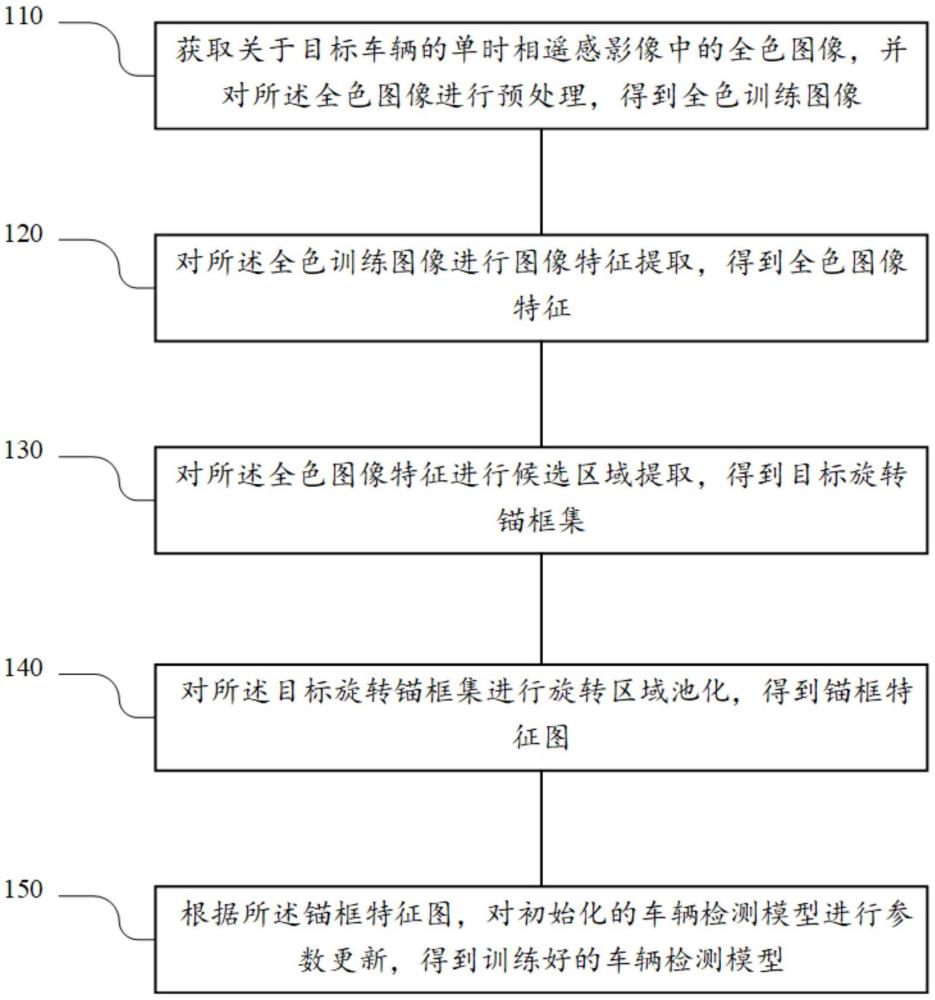
5、获取关于目标车辆的单时相遥感影像中的全色图像,并对所述全色图像进行预处理,得到全色训练图像;
6、对所述全色训练图像进行图像特征提取,得到全色图像特征;
7、对所述全色图像特征进行候选区域提取,得到目标旋转锚框集,所述目标旋转锚框集包括若干个与所述目标车辆对应的目标旋转锚框,每个所述目标旋转锚框所对应的边框尺度、长宽比或旋转角度存在至少一种不同;
8、对所述目标旋转锚框集进行旋转区域池化,得到锚框特征图;
9、根据所述锚框特征图,对初始化的车辆检测模型进行参数更新,得到训练好的车辆检测模型。
10、另外,根据本技术上述实施例的方法,还可以具有以下附加的技术特征:
11、进一步地,在本技术的一个实施例中,所述视觉场景识别模型包括若干个级联的动态池化网络框架,所述对所述局部特征进行多层动态池化聚合,得到拼接特征,包括:
12、将所述局部特征输入至所述若干个级联的动态池化网络框架中,得到若干个图像特征,每个所述图像特征与一个所述动态池化网络框架对应;
13、对所有所述图像特征进行特征展平,得到与不同特征层次对应的展平特征;
14、对所有所述展平特征进行特征拼接,得到所述拼接特征。
15、进一步地,在本技术的一个实施例中,所述对所述全色图像特征进行候选区域提取,得到与所述全色图像特征对应的目标旋转锚框集,包括:
16、对所述全色图像特征进行旋转锚框生成处理,得到第一中间锚框集,所述第一中间锚框集包括若干个与所述全色图像特征对应的中间旋转锚框,每个所述中间旋转锚框所对应的区域尺度、长宽比或旋转角度存在至少一种不同;
17、对所述第一中间锚框集进行锚框特征映射,得到第二中间锚框集;
18、对所述第二中间锚框集进行边框分类回归,得到所述目标旋转锚框集。
19、进一步地,在本技术的一个实施例中,所述对所述第二中间锚框集进行边框分类回归,得到所述目标旋转锚框集,包括:
20、对所述第二中间锚框集进行锚框分类,得到第三中间锚框集,所述第三中间锚框集为与所述目标车辆对应的中间旋转锚框的集合;
21、对所述第三中间锚框集进行边框回归偏移更新,得到所述目标旋转锚框集。
22、进一步地,在本技术的一个实施例中,所述对所述第三中间锚框集进行边框回归偏移更新,得到所述目标旋转锚框集,包括:
23、对所述第三中间锚框集进行边框偏移回归预测,得到边框偏移预测数据;
24、根据所述边框偏移预测数据,对所述第三中间锚框集进行边框偏移更新,得到所述目标旋转锚框集。
25、进一步地,在本技术的一个实施例中,所述对所述目标旋转锚框集进行旋转区域池化,得到锚框特征图,包括:
26、对所述目标旋转锚框集进行旋转坐标变换,得到第四旋转锚框集,所述第四旋转锚框集中的每个目标旋转锚框所对应的旋转角度相同;
27、对所述第四旋转锚框集进行区域尺度裁剪,得到第五旋转锚框集;
28、对所述第五旋转锚框集进行特征图池化映射,得到所述锚框特征图。
29、第二方面,本技术实施例提供了一种车辆检测模型的交通状态感知方法,包括:
30、获取交通路网数据和目标单时相遥感影像,所述目标单时相遥感影像包括目标全色图像和目标多光谱图像;
31、将所述目标全色图像输入至上述训练好的车辆检测模型中进行车辆目标检测,得到车辆目标检测结果;
32、根据所述车辆目标检测结果,对所述目标多光谱图像进行车辆移速分析处理,得到车辆移速数据;
33、根据所述车辆移速数据和所述车辆目标检测结果,对所述交通路网数据进行交通状态感知,得到交通状态感知结果。
34、进一步地,在本技术实施例中,所述根据所述车辆目标检测结果,对所述目标多光谱图像进行车辆移速分析处理,得到车辆移速数据,包括:
35、根据所述目标多光谱图像,获取第一波段光谱图像和第二波段光谱图像;
36、根据所述车辆目标检测结果,对所述第一波段光谱图像进行第一候选区域提取,得到第一波段候选区域,以及根据所述车辆目标检测结果,对所述第二波段光谱图像进行第二候选区域提取,得到第二波段候选区域;
37、根据所述第一波段候选区域,对所述第二波段候选区域进行区域位移匹配,得到所述车辆移速数据。
38、进一步地,在本技术实施例中,所述根据所述第一波段候选区域,对所述第二波段候选区域进行区域位移匹配,得到所述车辆移速数据,包括:
39、获取所述目标多光谱图像的光谱成像时间差;
40、根据所述第一波段候选区域,对所述第二波段候选区域进行模板匹配,得到第一车辆像素坐标数据和第二车辆像素坐标数据,所述第一车辆像素坐标数据为行驶车辆在所述第一波段候选区域内的像素坐标数据,所述第二车辆像素坐标数据为所述行驶车辆在所述第二波段候选区域内的像素坐标数据;
41、根据所述第一车辆像素坐标数据,对所述第二车辆像素坐标数据进行车辆位移计算,得到车辆位移数据;
42、根据所述光谱成像时间差,对所述车辆位移数据进行车辆移速计算,得到所述车辆移速数据。
43、进一步地,在本技术实施例中,所述根据所述车辆移速数据和所述车辆目标检测结果,对所述交通路网数据进行交通状态感知,得到交通状态感知结果,包括:
44、根据所述车辆目标检测结果,对所述交通路网数据进行车辆空间匹配,得到车辆空间匹配数据;
45、根据所述车辆移速数据,对所述车辆空间匹配数据进行交通状态评估,得到所述交通状态感知结果。
46、第三方面,本技术实施例提供了一种车辆检测模型的训练系统,包括:
47、第一处理单元,用于获取关于目标车辆的单时相遥感影像中的全色图像,并对所述全色图像进行预处理,得到全色训练图像;
48、第二处理单元,用于对所述全色训练图像进行图像特征提取,得到全色图像特征;
49、第三处理单元,用于对所述全色图像特征进行候选区域提取,得到目标旋转锚框集,所述目标旋转锚框集包括若干个与所述目标车辆对应的目标旋转锚框,每个所述目标旋转锚框所对应的边框尺度、长宽比或旋转角度存在至少一种不同;
50、第四处理单元,用于对所述目标旋转锚框集进行旋转区域池化,得到锚框特征图;
51、第五处理单元,用于根据所述锚框特征图,对初始化的车辆检测模型进行参数更新,得到训练好的车辆检测模型。
52、第四方面,本技术实施例提供了一种车辆检测模型的交通状态感知系统,包括:
53、第六处理单元,用于获取交通路网数据和目标单时相遥感影像,所述目标单时相遥感影像包括目标全色图像和目标多光谱图像;
54、第七处理单元,用于将所述目标全色图像输入至上述的训练好的车辆检测模型中进行车辆目标检测,得到车辆目标检测结果;
55、第八处理单元,用于根据所述车辆目标检测结果,对所述目标多光谱图像进行车辆移速分析处理,得到车辆移速数据;
56、第九单元,用于根据所述车辆移速数据和所述车辆目标检测结果,对所述交通路网数据进行交通状态感知,得到交通状态感知结果。
57、第五方面,本技术实施例还提供了一种电子设备,包括:
58、至少一个处理器;
59、至少一个存储器,用于存储至少一个程序;
60、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述的方法。
61、第六方面,本技术实施例还提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由所述处理器执行时用于实现上述的方法。
62、本技术的优点和有益效果将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到:
63、本技术实施例所公开的一种车辆检测模型的训练方法、交通状态感知方法及系统,其中,该训练方法获取关于目标车辆的单时相遥感影像中的全色图像,并对所述全色图像进行预处理,得到全色训练图像;对所述全色训练图像进行图像特征提取,得到全色图像特征;对所述全色图像特征进行候选区域提取,得到目标旋转锚框集,所述目标旋转锚框集包括若干个与所述目标车辆对应的目标旋转锚框,每个所述目标旋转锚框所对应的边框尺度、长宽比或旋转角度存在至少一种不同;对所述目标旋转锚框集进行旋转区域池化,得到锚框特征图;根据所述锚框特征图,对初始化的车辆检测模型进行参数更新,得到训练好的车辆检测模型。该训练方法通过对单时相遥感影像中的全色图像特征进行候选区域提取,以提取到若干个边框尺度、长宽比或旋转角度存在至少一种不同的目标旋转锚框,并对提取到的所有目标旋转锚框进行旋转区域池化,其可以使得训练出的车辆检测模型能够识别任意朝向、位置和尺寸的车辆,可以有效提高车辆检测的检测精度和检测效率;另外,该交通状态感知方法通过车辆检测模型使用单时相遥感影像进行车辆目标检测,然后根据得到的车辆目标检测结果进行车辆移速分析及交通状态感知,可以有效降低交通状态感知的成本,提高交通状态感知的实用性。
- 还没有人留言评论。精彩留言会获得点赞!