一种车位分配方法及装置与流程
[0001]
本发明涉及通信技术领域,具体涉及一种车位分配方法及装置。
背景技术:
[0002]
自主代客泊车(automated valet parking,avp),是指以自动驾驶的方式代替车主完成从停车场入口/出口到停车位的行驶与泊车任务。在车辆进入停车场之前,需要为具备avp功能的车辆分配一个空闲停车位。由于具备自动驾驶功能的车辆存在不同的功能等级,不同车企的车型在自主泊车能力上存在差异,现有的随机分配空闲车位的方法已不适用于自主泊车系统。因此,为不同自动驾驶功能的车辆提供相匹配的avp停车场和车位是实现安全自主泊车亟需解决的技术问题。
技术实现要素:
[0003]
本发明所要解决的技术问题是针对现有技术的上述不足,提供一种车位分配方法及装置,可实现为不同自动驾驶功能的车辆提供相适应的avp停车场和车位,以保证自主泊车的安全性。
[0004]
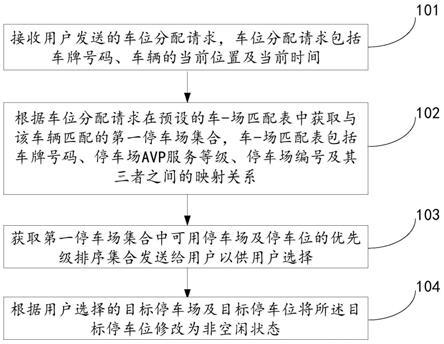
本发明实施例提供一种车位分配方法,应用于avp平台,方法包括:接收用户发送的车位分配请求,车位分配请求包括车牌号码、车辆的当前位置及当前时间;根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第一停车场集合,车-场匹配表包括车牌号码、停车场avp服务等级、停车场编号及其三者之间的映射关系;获取第一停车场集合中可用停车场及停车位的优先级排序集合发送给用户以供用户选择;根据用户选择的目标停车场及目标停车位将所述目标停车位修改为非空闲状态。
[0005]
优选地,在所述接收用户发送的车位分配请求之前,方法还包括:存储各停车场信息及场内车位信息,停车场信息包括停车场编号、驾驶员下车点位置、场端智能设备配置、场端支持光照强度的阈值、场端支持的天气,场内车位信息包括车位编号、车位泊车点、车位状态,车位状态包括空闲状态和非空闲状态;根据各停车场信息评估各停车场avp服务等级,并将之增补至各停车场信息中;构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系。
[0006]
优选地,在构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系之后,以及在所述接收用户发送的车位分配请求之前,方法还包括:接收并存储用户发送的车辆注册信息,车辆注册信息包括车牌号码、车辆型号;根据车辆注册信息获取该车辆的车-场匹配信息,形成预设的车-场匹配表。
[0007]
优选地,所述根据车辆注册信息获取该车辆的车-场匹配信息,形成预设的车-场匹配表,具体包括:根据车辆注册信息获取该车辆型号对应的停车场avp服务等级;查询各停车场信息以获取满足该车辆型号对应的停车场avp服务等级的停车场编号,得到该车辆的车-场匹配信息,形成预设的车-场匹配表。
[0008]
优选地,所述根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第
一停车场集合,具体包括:根据车牌号码在预设的车-场匹配表中获取与车辆匹配的第二停车场集合;根据当前位置所在城市查询所述城市当前时间的天气,估算光照强度;查询第二停车场集合中各停车场中场端支持的天气、场端支持光照强度的阈值;从第二停车场集合中筛选出支持在当前时间的天气、光照强度下提供avp服务的停车场,以得到第一停车场集合。
[0009]
优选地,所述获取第一停车场集合中可用停车场及停车位的优先级排序集合发送给用户以供用户选择,具体包括:查询第一停车场集合中各停车场的车位状态,筛选出有空闲车位的停车场,以得到第三停车场集合,第三停车场集合包括停车场编号和空闲车位编号的映射关系;获取车辆当前位置分别到第三停车场集合中各停车场的驾驶员下车点位置的时长,根据时长由小到大的顺序对第三停车场集合中各停车场进行排序,以得到第四停车场排序集合;计算第四停车场排序集合中各停车场的驾驶员下车点位置到场内所有空闲车位泊车点的路径;获取第四停车场排序集合中各停车场场内实时障碍物信息,判断驾驶员下车点位置到场内所有空闲车位泊车点的路径上是否存在影响车辆自主泊车的障碍物;根据受障碍物影响程度由小到大的顺序对所述路径进行排序,得到所述路径对应的空闲车位优先级排序;综合第四停车场排序集合及其空闲车位优先级排序,得到可用停车场及停车位的优先级排序,并将之发送给用户以供用户选择。
[0010]
本发明实施例还提供一种车位分配装置,应用于avp平台,装置包括接收模块、获取模块以及分配模块。接收模块,用于接收用户发送的车位分配请求,车位分配请求包括车牌号码、车辆的当前位置及当前时间。获取模块,与接收模块连接,用于根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第一停车场集合,车-场匹配表包括车牌号码、停车场avp服务等级、停车场编号及其三者之间的映射关系;以及,用于获取第一停车场集合中可用停车场及停车位的优先级排序集合发送给用户以供用户选择。分配模块,用于根据用户选择的目标停车场及目标停车位将目标停车位的状态修改为非空闲状态。
[0011]
优选地,装置还包括第一存储模块、评估模块,以及第二存储模块。第一存储模块,用于存储各停车场信息及场内车位信息,停车场信息包括停车场编号、驾驶员下车点位置、场端智能设备配置、场端支持光照强度的阈值、场端支持的天气,场内车位信息包括车位编号、车位泊车点、车位状态,车位状态包括空闲状态和非空闲状态。评估模块,与第一存储模块连接,用于评估各停车场avp服务等级,并将之增补至各停车场信息中。第二存储模块,与评估模块连接,用于构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系。
[0012]
优选地,获取模块包括获取单元、估算单元,以及第一筛选单元。获取单元,用于根据车牌号码在预设的车-场匹配表中获取与车辆匹配的第二停车场集合。估算单元,用于根据当前位置所在城市查询所述城市当前时间的天气,估算光照强度。第一筛选单元,与获取单元和估算单元连接,用于查询第二停车场集合中各停车场中场端支持的天气、场端支持光照强度的阈值,并从第二停车场集合中筛选出支持在当前时间的天气、光照强度下提供avp服务的停车场,以得到第一停车场集合。
[0013]
优选地,获取模块还包括第二筛选单元、第一排序单元、计算判断单元、第二排序单元,以及综合单元。第二筛选单元,用于查询第一停车场集合中各停车场的车位状态,筛选出有空闲车位的停车场,以得到第三停车场集合,第三停车场集合包括停车场编号和空
闲车位编号的映射关系。第一排序单元,与第二筛选单元连接,用于获取车辆当前位置分别到第三停车场集合中各停车场的驾驶员下车点位置的时长,根据时长由小到大的顺序对第三停车场集合中各停车场进行排序,以得到第四停车场排序集合。计算判断单元,与第一排序单元连接,用于计算第四停车场排序集合中各停车场的驾驶员下车点位置到场内所有空闲车位泊车点的路径;并获取第四停车场排序集合中各停车场场内实时障碍物信息,判断驾驶员下车点位置到场内所有空闲车位泊车点的路径上是否存在影响车辆自主泊车的障碍物。第二排序单元,与计算判断单元连接,用于根据受障碍物影响程度由小到大的顺序对所述路径进行排序,得到所述路径对应的空闲车位优先级排序。综合单元,与第一排序单元和第二排序单元连接,用于综合第四停车场排序集合及其空闲车位优先级排序,得到可用停车场及停车位的优先级排序,并将之发送给用户以供用户选择。
[0014]
本发明实施例提供的一种车位分配方法及装置中,根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第一停车场集合,并获取第一停车场集合中可用停车场及停车位的优先级排序集合发送给用户以供用户选择,从而向用户推荐与其车辆匹配的且可用的停车场及停车位,实现为不同自动驾驶功能的车辆提供匹配的avp停车场和车位,以保证自主泊车的安全性。
附图说明
[0015]
图1:为本发明实施例1的一种车位分配方法的流程图;
[0016]
图2:为本发明实施例3的一种车位分配装置的结构示意图。
具体实施方式
[0017]
为使本领域技术人员更好地理解本发明的技术方案,下面结合附图和实施例对本发明的车位分配方法及装置做进一步详细描述。
[0018]
实施例1:
[0019]
目前,自主泊车系统一般通过车端和场端两个维度的智能化改造实现,如车端配置车规级硬件完成自主泊车控制,场端配置感知、监测、定位等智能化基础设施。现已量产的泊车辅助系统包括自动泊车辅助系统apa(l2级)、远程遥控泊车辅助系统rpa(l3级)两类,另自主代客泊车avp(l4级)技术已趋于成熟。因此,不同车企的不同车型具备的自主泊车能力等级可能不同。
[0020]
如图1所示,本实施例提供一种车位分配方法,应用于avp平台或云平台,为不同车企的不同车型分配合适的空闲车位的方法,车位分配方法包括:
[0021]
步骤101,接收用户发送的车位分配请求,车位分配请求包括车牌号码、车辆的当前位置及当前时间。
[0022]
本实施例中,用户驾驶车辆即将到达目的地,用户通过终端侧的avp客户端向avp平台或云平台发送车位分配请求,用于请求avp平台给该车辆分配合适的停车场及停车位,车位分配请求包括车牌号码、车辆的当前位置及当前时间。其中,车牌号码用于唯一标识车辆,其他如车架号也可用于唯一标识车辆。
[0023]
在avp平台或云平台接收到用户发送的车位分配请求之前,车位分配方法还包括步骤10-步骤12:
[0024]
步骤10,存储各停车场信息及场内车位信息,停车场信息包括停车场编号、驾驶员下车点位置、场端智能设备配置、场端支持光照强度的阈值、场端支持的天气,场内车位信息包括车位编号、车位泊车点、车位状态,车位状态包括空闲状态和非空闲状态。
[0025]
本实施例中,avp平台或云平台预先存储各停车场信息及场内车位信息。停车场编号用于唯一标识停车场,车位编号用于唯一标识停车位。驾驶员下车点位置指驾驶员驾驶车辆到达停车场指定的驾驶员下车的位置,驾驶员下车后车辆进行自主泊车。场端智能设备配置包括感知设备、监测设备、定位设备等设备的配置,场端支持的天气包括晴、阴、雨、雪、雾,通常,露天的场端支持的天气包括晴、阴,而雨、雪、雾的天气影响露天场端设备的感知性能。车位泊车点为车位的中心点坐标。车位状态包括空闲状态和非空闲状态,空闲状态的车位可用于给车辆进行车位分配。
[0026]
步骤11,根据各停车场信息评估各停车场avp服务等级,并将之增补至各停车场信息中。
[0027]
本实施例中,avp平台或云平台根据各停车场信息中的场端智能设备配置评估各停车场avp服务等级的评估标准包括:
[0028]
(1)若场端为一般规范停车场,则停车场avp服务等级为pa1(parking lot level 1);
[0029]
(2)若场端配置唯一的avp专用标识(即在同一停车场内配置有与车位一一对应的avp专用标识)和定位设备,则停车场avp服务等级为pa2,其中,定位设备包括以下至少一种定位能力的设备,如gps定位、uwb定位、视觉定位、差分定位;
[0030]
(3)若场端配置唯一的avp专用标识、定位设备、障碍物感知设备、v2x(vehicle to x,车用无线通信技术)路侧设备,则停车场avp服务等级为pa3,其中,障碍物感知设备如摄像头、激光雷达、毫米波雷达,能实时感知到停车场障碍物信息数据并提交到边缘平台分析的设备,然后发送至车辆,辅助车辆避障决策;v2x路侧设备指的是部署在路侧的支持v2x通信方式的rsu(road side unit,路侧单元)设备,此处指场端具备v2x方式的通信能力;
[0031]
(4)若场侧为avp专用停车场,无复杂交通环境障碍物和过往行人车辆,则停车场avp服务等级pa4。
[0032]
avp平台或云平台在评估各停车场avp服务等级之后,将各停车场的avp服务等级的评估结果增补至相应停车场的停车场信息中。
[0033]
步骤12,构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系。
[0034]
本实施例中,根据市场上主流自动驾驶车辆的avp能力,以及停车场avp服务等级可支持的车辆的avp能力,构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系,其中,自动驾驶车辆的avp能力包括:
[0035]
(1)avp1:车辆自动驾驶能力等级为l2或l3级但不具备v2x功能;
[0036]
(2)avp2:车辆自动驾驶能力等级为l2或l3级且具备v2x功能;
[0037]
(3)avp3:车辆自动驾驶能力等级为l4级;
[0038]
(4)avp4:车辆自动驾驶能力等级为l5级。
[0039]
停车场avp服务等级所支持的车辆的avp能力的对应关系如下:
[0040]
(1)pa4等级停车场:支持avp4、avp3、avp2、avp1能力车辆;
[0041]
(2)pa3等级停车场:支持avp4、avp3、avp2能力车辆;
[0042]
(3)pa2等级停车场:支持avp4、avp3能力车辆;
[0043]
(4)pa1等级停车场:仅支持avp4能力车辆。
[0044]
例如,构建并存储的各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系包括:车辆自动驾驶能力等级为l4级的车辆型号对应的车辆avp能力为avp3,其对应的停车场avp服务等级包括pa2、pa3、pa4。其中,满足任一停车场avp服务等级的停车场的数量可能为多个。
[0045]
可选地,在构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系之后,以及在接收用户发送的车位分配请求之前,车位分配方法还包括步骤13-步骤14:
[0046]
步骤13,接收并存储用户发送的车辆注册信息,车辆注册信息包括车牌号码、车辆型号。
[0047]
本实施例中,用户通过终端侧的avp客户端向avp平台或云平台发送车辆注册信息,车辆号码为车辆的唯一标识。
[0048]
步骤14,根据车辆注册信息获取该车辆的车-场匹配信息,形成预设的车-场匹配表。
[0049]
本实施例中,在用户注册车辆信息成功后,avp服务平台或云平台根据车辆型号在车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系中查询到支持该车辆型号的停车场avp服务等级,通过查询各停车场信息,获取到满足该车辆型号的停车场avp服务等级的所有停车场编号,生成车-场匹配表,车-场匹配表包括该车辆的车牌号码、停车场avp服务等级、停车场编号及其三者之间的映射关系。其中,停车场编号的数量为多个。avp服务平台或云平台将针对该车牌号码生成的车-场匹配表写入xml(extensible markup language,可扩展标记语言)文件进行缓存,得到该车辆的预设的车-场匹配表,以便进行数据调用。xml数据以纯文本格式存储,更易读、更便于记录、更便于调试,使得不同系统、不同程序之间的数据共享变得更加简单。需要说明的是,针对每个注册的车牌号码在avp服务平台或云平台均缓存有其对应的车-场匹配表。通过针对每个注册的车牌号码缓存相应的车-场匹配表,便于在车位分配过程中快速调用车-场匹配表数据,从而提高车位分配的响应速度。
[0050]
步骤102,根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第一停车场集合,车-场匹配表包括车牌号码、停车场avp服务等级、停车场编号及其三者之间的映射关系。
[0051]
具体地,根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第一停车场集合,包括步骤1021-步骤1024:
[0052]
步骤1021,根据车牌号码在预设的车-场匹配表中获取与车辆匹配的第二停车场集合。
[0053]
本实施例中,avp服务平台或云平台根据车牌号码在预设的车-场匹配表中获取与该车牌号码匹配的第二停车场集合,即获取到该车牌号码的车-场匹配表中的所有停车场编号的集合。优选地,可获取与车辆的当前位置或目的地在预设阈值距离内的停车场的相应编号,该优选方案可以降低计算量,进一步提高车位分配的响应速度。由于车-场匹配表
基于车辆avp能力与停车场avp服务等级的匹配关系生成的,因此,从车-场匹配表中获取的第二停车场集合中的停车场均能满足车辆的avp能力,保证自主泊车的安全性。
[0054]
步骤1022,根据当前位置所在城市查询城市当前时间的天气,估算光照强度。
[0055]
本实施例中,avp服务平台或云平台根据车位分配请求中的车辆当前位置和当前时间,查询当前位置所在城市的当前时间的天气,估算光照强度。如根据晴空指数、太阳高度角、大气质量等数据综合估算光照强度。
[0056]
步骤1023,查询第二停车场集合中各停车场中场端支持的天气、场端支持光照强度的阈值。
[0057]
步骤1024,从第二停车场集合中筛选出支持在当前时间的天气、光照强度下提供avp服务的停车场,以得到第一停车场集合。
[0058]
本实施例中,avp服务平台或云平台将查询到的当前时间的天气及估算得到的光照强度,与第二停车场集合中各停车场的停车场信息中的场端支持的天气、光照强度阈值进行比较,从第二停车场集合中筛选出支持在当前时间的天气、光照强度下提供avp服务的停车场,以得到第一停车场集合。根据车位分配请求当前实时的天气、光照强度条件在第二停车场集合中筛选出第一停车场集合,使得第一停车场集合中的停车场能进一步保证自主泊车的安全性。
[0059]
步骤103,获取第一停车场集合中可用停车场及停车位的优先级排序集合发送给用户以供用户选择。
[0060]
具体地,获取第一停车场集合中可用停车场及停车位的优先级排序集合发送给用户以供用户选择,包括步骤1031-1036:
[0061]
步骤1031,查询第一停车场集合中各停车场的车位状态,筛选出有空闲车位的停车场,以得到第三停车场集合,第三停车场集合包括停车场编号和空闲车位编号的映射关系。
[0062]
本实施例中,查询第一停车场集合中各停车场的车位信息中的车位状态,筛选出有空闲车位的停车场,得到第三停车场集合,第三停车场集合包括停车场编号和空闲车位的车位编号的映射关系。得到的第三停车场集合包括的停车场编号的数量可能为多个,每个停车场编号对应的空闲的车位编号的数量可能为多个。
[0063]
步骤1032,获取车辆当前位置分别到第三停车场集合中各停车场的驾驶员下车点位置的时长,根据时长由小到大的顺序对第三停车场集合中各停车场进行排序,以得到第四停车场排序集合。
[0064]
本实施例中,车辆当前位置到停车场的驾驶员下车点位置的时长最短的停车场为优先级最高的停车场。第四停车场排序集合为将第三停车场集合中的各停车场及其空闲车位根据车辆当前位置到停车场的驾驶员下车点位置的时长由小到大进行优先级的排序所获得。其中,第四停车场排序集合中的停车场的数量与第三停车场集合中的停车场数量相同。
[0065]
步骤1033,计算第四停车场排序集合中各停车场的驾驶员下车点位置到场内所有空闲车位泊车点的路径。
[0066]
本实施例中,各停车场的驾驶员下车点位置到场内所有空闲车位泊车点的路径即是自主代客泊车的行驶路径。
[0067]
步骤1034,获取第四停车场排序集合中各停车场场内实时障碍物信息,判断驾驶员下车点位置到场内所有空闲车位泊车点的路径上是否存在影响车辆自主泊车的障碍物。
[0068]
步骤1035,根据受障碍物影响程度由小到大的顺序对所述路径进行排序,得到所述路径对应的空闲车位优先级排序。
[0069]
本实施例中,受障碍物影响程度的判定规则可预先设置于avp平台或云平台,例如受障碍物影响程度可根据场端待进行自主代客泊车的车辆数量进行评定,路径上处于等待停车的车辆为多辆相比于无等待车辆的受障碍物影响程度较高。步骤1035针对第四停车场排序集合中各停车场的每个空闲车位根据行驶路径受障碍物影响程度完成优先级的排序。优先级最高的空闲车位使得车辆在自主泊车过程中受障碍物影响程度最低,从而进一步提升自主泊车的安全性。
[0070]
步骤1036,综合第四停车场排序集合及其空闲车位优先级排序,得到可用停车场及停车位的优先级排序,并将之发送给用户以供用户选择。
[0071]
本实施例中,可用停车场及停车位的优先级排序包括根据车辆当前位置到停车场的驾驶员下车点位置的到达时长进行停车场的排序的结果,以及根据各停车场内行驶路径受障碍物影响程度进行各停车场内的空闲车位的排序的结果。avp服务平台或云平台将获得的可用停车场及停车位的优先级排序发送给用户终端侧,以供用户进行选择。向用户提供相匹配的停车场及停车位,且对停车场和停车位进行了优先级排序,优先级高的停车场及停车位可缩短用户车辆自主泊车的时长,提升用户体验。
[0072]
步骤104,根据用户选择的目标停车场及目标停车位将目标停车位修改为非空闲状态。
[0073]
本实施例中,用户在终端侧显示的可用停车场及停车位的优先级排序中根据需求选择某一停车位,avp服务平台或云平台将用户选择的停车位的状态修改为非空闲状态,以供用户车辆进行自主代客泊车时停放。
[0074]
本实施例提供的车位分配方法中,根据构建的车辆型号、车辆avp能力及停车场avp服务等级的匹配性映射关系,针对每个车牌号码预先存储相应的车-场匹配表。以使用户在请求车位分配时,根据车牌号码查询其车-场匹配表,获取匹配的停车场编号集合,得到与该车辆自主代客泊车能力的相匹配的停车场,实现为不同自动驾驶功能的车辆提供相适应的avp停车场和车位,提高自主泊车的安全性。继而根据车辆当前位置到达各停车场的时长对匹配的停车场集合进行优先级排序,以及根据各停车场驾驶员下车位置到空闲车位的行驶路径受障碍物影响程度对各停车场的空闲车位进行优先级排序,以供用户选择最适合的停车场及停车位,进一步提供自主泊车的安全性,且提升用户的使用体验。
[0075]
实施例2:
[0076]
如图2所示,本实施例提供一种车位分配装置,应用于avp平台或云平台,车位分配装置包括接收模块21、获取模块22以及分配模块23。
[0077]
接收模块21,用于接收用户发送的车位分配请求,车位分配请求包括车牌号码、车辆的当前位置及当前时间。
[0078]
获取模块22,与接收模块21连接,用于根据车位分配请求在预设的车-场匹配表中获取与该车辆匹配的第一停车场集合,车-场匹配表包括车牌号码、停车场avp服务等级、停车场编号及其三者之间的映射关系;以及,用于获取第一停车场集合中可用停车场及停车
位的优先级排序集合发送给用户以供用户选择。
[0079]
分配模块23,用于根据用户选择的目标停车场及目标停车位锁定目标停车位的状态为非空闲状态。
[0080]
可选地,车位分配装置还包括第一存储模块、评估模块,以及第二存储模块。
[0081]
第一存储模块,用于存储各停车场信息及场内车位信息,停车场信息包括停车场编号、驾驶员下车点位置、场端智能设备配置、场端支持光照强度的阈值、场端支持的天气,场内车位信息包括车位编号、车位泊车点、车位状态,车位状态包括空闲状态和非空闲状态。
[0082]
评估模块,与第一存储模块连接,用于根据各停车场信息中的场端智能设备配置评估各停车场avp服务等级,并将之增补至各停车场信息中。
[0083]
第二存储模块,与评估模块连接,用于构建并存储各车辆型号、车辆avp能力、停车场avp服务等级及其三者之间的映射关系。
[0084]
可选地,获取模块包括获取单元、估算单元,以及第一筛选单元。
[0085]
获取单元,用于根据车牌号码在预设的车-场匹配表中获取与车辆匹配的第二停车场集合。
[0086]
估算单元,用于根据当前位置所在城市查询城市当前时间的天气,估算光照强度。
[0087]
第一筛选单元,与获取单元和估算单元连接,用于查询第二停车场集合中各停车场中场端支持的天气、场端支持光照强度的阈值,并从第二停车场集合中筛选出支持在当前时间的天气、光照强度下提供avp服务的停车场,以得到第一停车场集合。
[0088]
可选地,获取模块还包括第二筛选单元、第一排序单元、计算判断单元、第二排序单元,以及综合单元。
[0089]
第二筛选单元,用于查询第一停车场集合中各停车场的车位状态,筛选出有空闲车位的停车场,以得到第三停车场集合,第三停车场集合包括停车场编号和空闲车位编号的映射关系。
[0090]
第一排序单元,与第二筛选单元连接,用于获取车辆当前位置分别到第三停车场集合中各停车场的驾驶员下车点位置的时长,根据时长由小到大的顺序对第三停车场集合中各停车场进行排序,以得到第四停车场排序集合。
[0091]
计算判断单元,与第一排序单元连接,用于计算第四停车场排序集合中各停车场的驾驶员下车点位置到场内所有空闲车位泊车点的路径;并获取第四停车场排序集合中各停车场场内实时障碍物信息,判断驾驶员下车点位置到场内所有空闲车位泊车点的路径上是否存在影响车辆自主泊车的障碍物。
[0092]
第二排序单元,与计算判断单元连接,用于根据受障碍物影响程度由小到大的顺序对路径进行排序,得到路径对应的空闲车位优先级排序。
[0093]
综合单元,与第一排序单元和第二排序单元连接,用于综合第四停车场排序集合及其空闲车位优先级排序,得到可用停车场及停车位的优先级排序,并将之发送给用户以供用户选择。
[0094]
可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1