车辆调度方法、装置、设备及系统与流程
本技术涉及车辆调度,具体涉及一种车辆调度方法、装置、设备及系统。
背景技术:
1、目前,在仓储物流和离散加工制造业,其厂房内部经常有大量的物流需求,而厂房内的道路或通道通常是比较狭窄的,大多只能允许一辆车通行。在此情况下,如果大量应用自动导航运输车(automatedguidedvehicle,agv)进行工厂内物流运输,很容易发生车辆死锁冲突,严重影响物流效率。因此,如何避免车辆死锁冲突的发生,是亟待解决的问题。
技术实现思路
1、有鉴于此,本技术提供了一种车辆调度方法、装置、设备及系统,能够有效避免车辆死锁冲突的发生。
2、为实现以上目的,本技术采用如下技术方案:
3、本技术的第一方面提供一种车辆调度方法,包括:
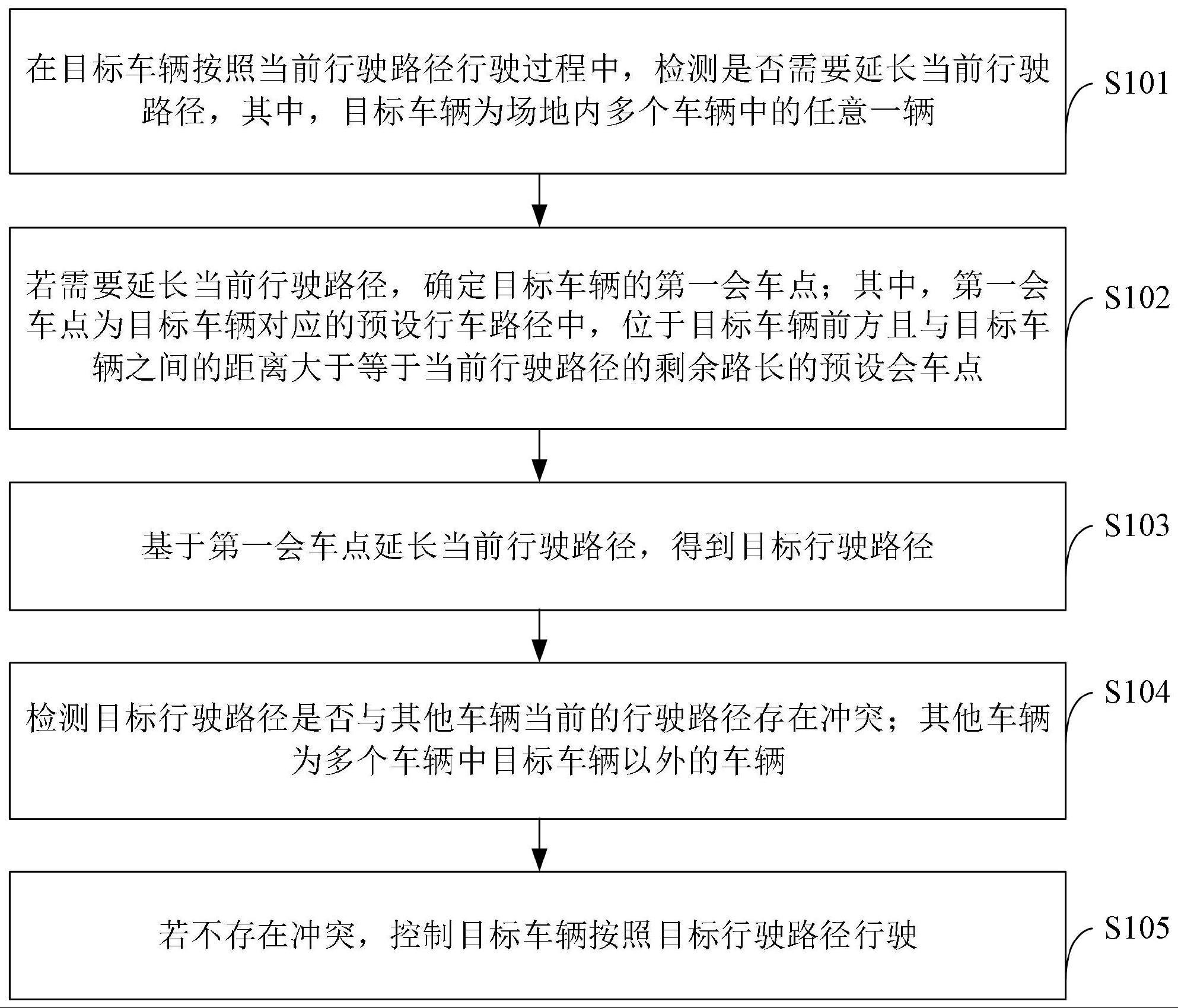
4、在目标车辆按照当前行驶路径行驶过程中,检测是否需要延长所述当前行驶路径,所述目标车辆为场地内多个车辆中的任意一辆;
5、若需要延长所述当前行驶路径,确定所述目标车辆的第一会车点;其中,所述第一会车点为所述目标车辆对应的预设行车路径中,位于所述目标车辆前方且与所述目标车辆之间的距离大于等于所述当前行驶路径的剩余路长的预设会车点;
6、基于所述第一会车点延长所述当前行驶路径,得到目标行驶路径;
7、检测所述目标行驶路径是否与其他车辆当前的行驶路径存在冲突;所述其他车辆为所述多个车辆中所述目标车辆以外的车辆;
8、若不存在冲突,控制所述目标车辆按照所述目标行驶路径行驶。
9、可选的,若所述目标行驶路径与其他车辆当前的行驶路径存在冲突,确定所述目标车辆的第二会车点;
10、其中,所述第二会车点为所述目标车辆对应的预设行车路径中,所述第一会车点与所述目标车辆之间距离所述第一会车点最近的预设会车点;
11、将所述第二会车点作为第一会车点,并返回基于所述第一会车点延长所述当前行驶路径,得到目标行驶路径的步骤。
12、可选的,所述检测是否需要延长所述当前行驶路径,包括;
13、检测所述当前行驶路径的剩余路长是否小于第一阈值,以及所述当前行驶路径的终点是否为所述预设行车路径的终点;
14、若所述当前行驶路径的剩余路长小于第一阈值,且所述当前行驶路径的终点不是所述预设行车路径的终点,则确定需要延长目标车辆的当前行驶路径;
15、若所述当前行驶路径的剩余路长大于等于第一阈值,或者所述当前行驶路径的终点是所述预设行车路径的终点,则确定不需要延长目标车辆的当前行驶路径。
16、可选的,还包括:
17、检测所述目标车辆的当前行驶路径的剩余路长是否小于第二阈值;所述第二阈值小于所述第一阈值;
18、若所述剩余路长小于第二阈值,则检测所述剩余路长的终点与所述其他车辆当前的行驶路径是否存在冲突;
19、若存在冲突,则检测所述冲突车辆当前的行驶路径的终点是否与所述目标车辆对应的预设行车路径存在冲突;
20、若所述冲突车辆当前的行驶路径的终点与所述目标车辆对应的预设行车路径存在冲突,控制所述目标车辆进入会车让行状态。
21、可选的,控制所述目标车辆进入会车让行状态,包括:
22、确定所述剩余路长的终点所处的目标会车区域以及所述目标会车区域对应的目标区域类型;
23、根据所述目标会车区域以及所述目标区域类型,从所述目标会车区域的所有预设会车点中确定所述目标车辆的会车让行点;
24、生成包括所述会车让行点的会车让行指令,并下发给所述目标车辆。
25、可选的,在所述冲突车辆的当前行驶路径的终点与所述目标车辆对应的预设行车路径存在冲突的情况下,所述方法还包括:
26、若所述目标车辆到达所述剩余路长的终点,则将所述剩余路长的终点标记为与所述目标车辆对应的被占用会车点。
27、可选的,在控制所述目标车辆按照所述目标行驶路径行驶之前,所述方法还包括:
28、若所述目标车辆处于会车让行状态,则检测所述目标行驶路径的终点与所述会车让行点是否属于同一会车区域;
29、若所述目标行驶路径的终点与所述会车让行点不属于同一会车区域,则解除对与所述目标车辆对应的被占用会车点的占用。
30、可选的,检测所述目标行驶路径是否与其他车辆当前的行驶路径存在冲突,包括:
31、检测所述目标行驶路径与所述其他车辆当前的行驶路径的最小间距是否小于第三阈值,以及,检测所述目标行驶路径是否途径所述其他车辆对应的被占用会车点;
32、若所述目标行驶路径与所述其他车辆当前的行驶路径的最小间距小于第三阈值,或者,所述目标行驶路径途径所述其他车辆对应的被占用会车点,则确定所述目标行驶路径与其他车辆当前的行驶路径存在冲突。
33、可选的,所述检测是否需要延长所述目标车辆的当前行驶路径之前,所述方法还包括:
34、按照预设规则更新所述场地内各车辆的行驶优先级;
35、按照行驶优先级由高到低的顺序,依次将所述场地内的各车辆作为所述目标车辆;
36、按照所述目标车辆的当前行驶路径控制所述目标车辆运行。
37、可选的,所述按照预设规则更新所述场地内各车辆的行驶优先级,包括:
38、根据所述多个车辆的全局路径信息,分别计算得到所述多个车辆的优先级权重;所述全局路径信息包括全局路径总路长、总等待时长、当前位置等待时长;
39、根据各所述车辆的优先级权重,更新各所述车辆的行驶优先级。
40、可选的,确定所述目标车辆的第一会车点,包括:
41、将在所述目标车辆对应的预设行车路径中,位于所述目标车辆前方,与所述目标车辆之间距离大于第四阈值,且距所述目标车辆最近的预设会车点确定为所述目标车辆的第一会车点。
42、本技术的第二方面提供一种车辆调度装置,包括:
43、第一检测模块,用于在目标车辆按照当前行驶路径行驶过程中,检测是否需要延长所述当前行驶路径,所述目标车辆为场地内多个车辆中的任意一辆;
44、确定模块,用于若需要延长所述当前行驶路径,确定所述目标车辆的第一会车点;其中,所述第一会车点为所述目标车辆对应的预设行车路径中,位于所述目标车辆前方且与所述目标车辆之间的距离大于等于所述当前行驶路径的剩余路长的预设会车点;
45、获取模块,用于基于所述第一会车点延长所述当前行驶路径,得到目标行驶路径;
46、第二检测模块,用于检测所述目标行驶路径是否与其他车辆当前的行驶路径存在冲突;所述其他车辆为所述多个车辆中所述目标车辆以外的车辆;
47、控制模块,用于若所述目标行驶路径与其他车辆当前的行驶路径不存在冲突,控制所述目标车辆按照所述目标行驶路径行驶。
48、本技术的第三方面提供一种车辆调度设备,包括:
49、处理器,以及与所述处理器相连接的存储器;
50、所述存储器用于存储计算机程序;
51、所述处理器用于调用并执行所述存储器中的所述计算机程序,以执行如本技术的第一方面所述的车辆调度方法。
52、本技术的第四方面提供一种车辆调度系统,包括如本技术的第三方面所述的车辆调度设备。
53、本技术提供的技术方案可以包括以下有益效果:
54、本技术的方案中,在目标车辆按照当前行驶路径行驶过程中,检测是否需要延长当前行驶路径,其中,目标车辆为场地内多个车辆中的任意一辆;若需要延长当前行驶路径,则可以确定目标车辆的第一会车点,其中,第一会车点为目标车辆对应的预设行车路径中,位于目标车辆前方且与目标车辆之间的距离大于等于当前行驶路径的剩余路长的预设会车点;进而基于第一会车点延长当前行驶路径,得到目标行驶路径。检测目标行驶路径是否与其他车辆当前的行驶路径存在冲突;其他车辆为多个车辆中目标车辆以外的车辆;若不存在冲突,则控制目标车辆按照目标行驶路径行驶。如此,在目标车辆完成预设行车路径的过程中,确保了目标车辆所接收到的目标行驶路径均为不与场地内其他车辆当前的行驶路径存在冲突的路径,有效避免了行驶过程中目标车辆与其他车辆发生死锁冲突的可能,提高了运输效率。
- 还没有人留言评论。精彩留言会获得点赞!