本发明属于交通管理,尤其涉及一种智能网联混行交通流下的多匝道协同控制方法。
背景技术:
1、随着交通流量的日益增长,高速公路频繁出现交通拥堵,对道路通行效率和车辆安全构成显著挑战。匝道控制是一种重要的高速公路控制手段,其主要采用的控制思路是通过匝道信号灯调整匝道驶出流量,使得主线流量和匝道流量之和不超过道路容量,从而保障合流区域畅通。
2、近年来,由于智能网联车辆在通行效率、交通安全和交通流稳定性方面的显著优势,其正受到越来越多的关注。然而,在智能网联车辆被广泛接受和采用之前,由智能网联车辆和人工驾驶车辆共同组合的混合交通流将会持续很长一段时间。这将会给高速公路混合交通流中交通控制问题,如匝道控制策略带来新的挑战和机遇。传统的匝道控制策略基于相对稳定的人工驾驶交通流环境进行设计,其主要方法依赖于固定的临界占有率等交通流参数进行反馈控制。而混合交通流环境下,由于智能网联车辆和人工驾驶车辆的高度异质性,交通流参数是动态调整的,这对交通控制提出了更高的要求。
3、鉴于此,亟需开发一种面向智能网联混行交通流的多匝道协同控制方法。该方法基于对智能网联混合交通流的精确建模,设计动态临界占有率估计器,结合反馈控制原理,并充分利用多匝道的空间资源优势。其目标是专注于解决智能网联混行交通流下的高速公路多匝道区域的交通拥堵问题,通过智能化的匝道管理策略,提高整体道路网络的通行效率和安全性。
技术实现思路
1、本发明的目的在于解决现有技术中存在的问题,并提供一种智能网联混行交通流下的多匝道协同控制方法,该方法包括对智能网联混合交通的交通流建模技术和混合交通流环境下的多匝道协同控制技术,用于缓解智能网联混行交通流下高速公路多匝道区域的交通拥堵问题。
2、为了实现上述发明目的,本发明具体采用如下技术方案:
3、本发明提供了一种智能网联混行交通流下的多匝道协同控制方法,包括以下步骤:
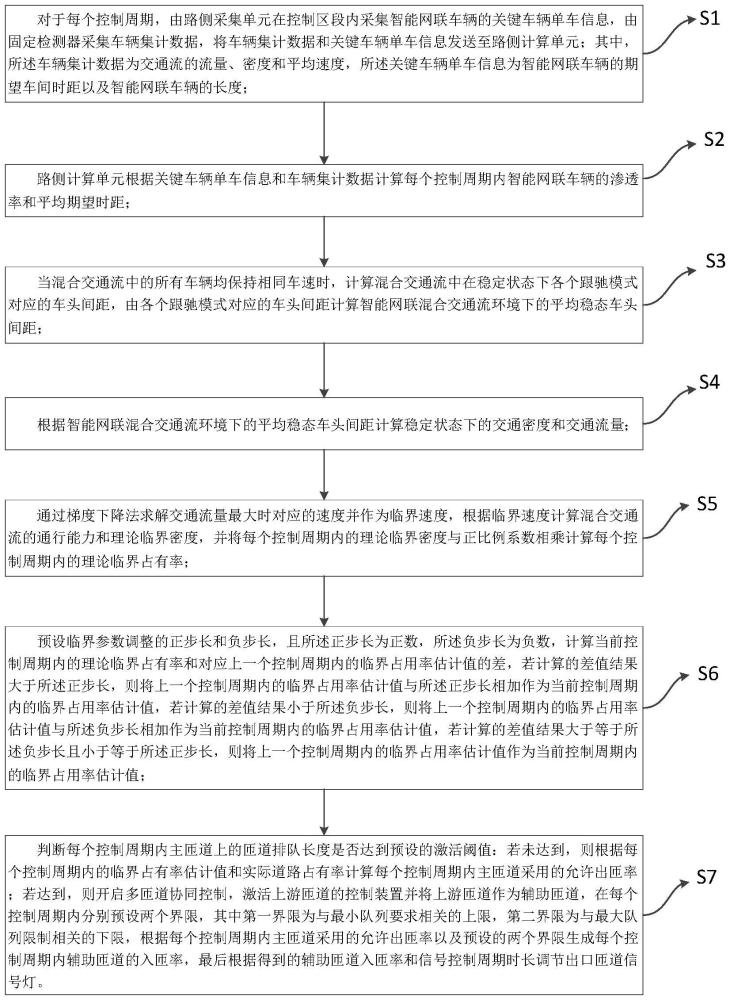
4、s1、对于每个控制周期,由路侧采集单元在控制区段内采集智能网联车辆的关键车辆单车信息,由固定检测器采集车辆集计数据,将车辆集计数据和关键车辆单车信息发送至路侧计算单元;其中,所述车辆集计数据为交通流的流量、密度和平均速度,所述关键车辆单车信息为智能网联车辆的期望车间时距以及智能网联车辆的长度;
5、s2、路侧计算单元根据关键车辆单车信息和车辆集计数据计算每个控制周期内智能网联车辆的渗透率和平均期望时距;
6、s3、当混合交通流中的所有车辆均保持相同车速时,计算混合交通流中在稳定状态下各个跟驰模式对应的车头间距,由各个跟驰模式对应的车头间距计算智能网联混合交通流环境下的平均稳态车头间距;
7、s4、根据智能网联混合交通流环境下的平均稳态车头间距计算稳定状态下的交通密度和交通流量;
8、s5、通过梯度下降法求解交通流量最大时对应的速度并作为临界速度,根据临界速度计算混合交通流的通行能力和理论临界密度,并将每个控制周期内的理论临界密度与正比例系数相乘计算每个控制周期内的理论临界占有率;
9、s6、预设临界参数调整的正步长和负步长,且所述正步长为正数,所述负步长为负数,计算当前控制周期内的理论临界占有率和对应上一个控制周期内的临界占用率估计值的差,若计算的差值结果大于所述正步长,则将上一个控制周期内的临界占用率估计值与所述正步长相加作为当前控制周期内的临界占用率估计值,若计算的差值结果小于所述负步长,则将上一个控制周期内的临界占用率估计值与所述负步长相加作为当前控制周期内的临界占用率估计值,若计算的差值结果大于等于所述负步长且小于等于所述正步长,则将上一个控制周期内的临界占用率估计值作为当前控制周期内的临界占用率估计值;
10、s7、判断每个控制周期内主匝道上的匝道排队长度是否达到预设的激活阈值:若未达到,则根据每个控制周期内的临界占有率估计值和实际道路占有率计算每个控制周期内主匝道采用的允许出匝率;若达到,则开启多匝道协同控制,激活上游匝道的控制装置并将上游匝道作为辅助匝道,在每个控制周期内分别预设两个界限,其中第一界限为与最小队列要求相关的上限,第二界限为与最大队列限制相关的下限,根据每个控制周期内主匝道采用的允许出匝率以及预设的两个界限生成每个控制周期内辅助匝道的入匝率,最后根据得到的辅助匝道入匝率和信号控制周期时长调节出口匝道信号灯。
11、在上述方案基础上,各步骤可以采用如下优选的具体方式实现。
12、作为优选,步骤s2中,第t个控制周期内,智能网联车辆的渗透率p(t)以及平均期望时距tm(t)函数形式分别为:
13、
14、其中,nc(t)是第t个控制周期内智能网联车辆总数,nt(t)是第t个控制周期内所有车辆总数,是第t个控制周期内第ic个智能网联车辆的期望车间时距。
15、作为优选,步骤s3中,各个跟驰模式对应的车头间距函数形式分别为:
16、
17、h10=vta+l+s
18、
19、其中,h11表示前车为智能网联车辆、后车为智能网联车辆对应的稳定车头间距,h10表示前车为人工驾驶车辆、后车为智能网联车辆对应的稳定车头间距,h01表示前车为智能网联车辆、后车为人工驾驶车辆对应的稳定车头间距,h00表示前车为人工驾驶车辆、后车为人工驾驶车辆对应的稳定车头间距;n表示智能网联车辆的车辆类型总数,v表示车辆的平均速度,表示第i种车辆类型的智能网联车辆与前车保持的期望车间时距,l表示智能网联车辆的长度,s表示最小安全距离,pi、qi分别表示第i种车辆类型的智能网联车辆渗透率、退化率。
20、作为优选,步骤s3中,智能网联混合交通流环境下的平均稳态车头间距函数形式为:
21、
22、其中,第i种车辆类型的智能网联车辆退化率qi的函数形式为:
23、
24、其中,p表示智能网联车辆总渗透率。
25、作为优选,步骤s4中,当车辆速度为v时,交通密度k(v)和交通流量c(v)的函数形式分别为:
26、
27、其中,表示智能网联车辆的平均期望车间时距;ta表示后车为智能网联车辆与前车为人工驾驶车辆保持的期望车间时距,th表示人工驾驶车辆与前车的安全车头时距,vf表示自由流速度。
28、作为优选,步骤s5中,当临界速度为vc时,混合交通流的通行能力c(vc)和理论临界密度kc(vc)的函数形式分别为:
29、
30、作为优选,步骤s7中,当主匝道上的匝道排队长度未达到预设的激活阈值wt时,在第t个控制周期内,主匝道采用的允许出匝率函数形式为:
31、
32、其中,dm(t)表示由固定检测器得到的第t个控制周期内的实际道路占有率,kr表示控制参数,qr(t)表示第t个控制周期内主匝道采用的允许出匝率,qr(t-1)表示第(t-1)个控制周期内主匝道采用的允许出匝率,表示第t个控制周期内临界占用率估计值。
33、作为优选,步骤s7中,当主匝道上的匝道排队长度达到预设的激活阈值wt时,根据匝道的最大排队限制wu和第t个控制周期内的实时匝道排队长度w(t)、以及获取到的第(t-1)个控制周期内匝道交通需求qd(t-1)计算第t个控制周期内最大队列限制相关的下限ql(t):
34、
35、其中,t表示控制周期时长。
36、作为优选,步骤s7中,根据第t个控制周期内的实时匝道排队长度w(t)和匝道的最小队列要求wl、以及获取到的第(t-1)个控制周期内匝道交通需求qd(t-1)计算第t个控制周期内最小队列要求相关的上限qu(t):
37、
38、作为优选,根据第t个控制周期内主匝道采用的允许出匝率qr(t)以及最大队列限制相关的下限ql(t)和最小队列要求相关的上限qu(t)生成第t个控制周期内辅助匝道的入匝率qin(t):
39、qin(t)=max(min(qr(t),ql(t)),qu(t))。
40、本发明相对于现有技术而言,具有以下有益效果:
41、本发明基于所提出的智能网联混合交通流模型,得到了一种智能网联混行交通流下的多匝道协同控制方法。该方法结合动态临界占用率估计方法生成当前交通环境对应的临界占有率,用以应对混合交通流环境。通过协同控制,显著提高了高速公路多匝道区域的交通管理效率。与传统方法相比,本发明的优势在于能够同时利用智能网联汽车和固定检测器实时交通数据,动态调整控制参数,实现多匝道的协同控制,可适用于智能网联混合交通流下的高速公路管理。此外,本发明为智能网联混合交通流开发的交通流模型,可以为今后交通管理者对混合交通流下的交通管理和控制提供理论指导。