一种堆叠式晶圆快速降温装置的制作方法
[0001]
本实用新型涉及一种半导体制造过程中的晶圆处理单元,尤其是一种晶圆快速降温装置。
背景技术:
[0002]
在芯片制造工艺中,光刻是制造大规模集成电路的关键工艺步骤。对晶圆进行光刻工艺时,需要对晶圆进行一系列的前处理和后处理操作,其具体工艺过程如下:前处理—涂胶—软烘烤—光刻—曝光后烘—显影—硬烘烤。其中,在前处理、软烘烤、曝光后烘、硬烘烤处理之后都需要对晶圆进行降温处理,使晶圆快速恢复到常温状态(22℃)。这种给晶圆降温的装置被称为冷盘。
[0003]
现有的冷盘技术通常采用上下盘体夹持半导体制冷片的结构形式,利用半导体制冷片的珀尔帖效应对上盘体进行降温,以达到冷却晶圆的作用。例如,公开号为cn201011654的中国实用新型专利,公开了一种“冷盘盘体结构”,其通过半导体制冷模块来实现对冷盘盘体温度的精确控制。此种通过上下盘体夹持半导体制冷片的冷盘结构形式存在着一定的缺陷,为了保证温度传导的均一性,其盘体结构较厚;因为晶圆制造工艺中对冷盘的温度控制精度要求高、降温速率快,因而需要采用数量较多的大功率制冷片及精密的控制电路,大大提高了冷盘单元的成本和结构复杂性;此外,半导体制冷片在使用过程中,其放热端还需要添加额外的冷却装置。以上这些都制约了冷盘的效率。
技术实现要素:
[0004]
为了提高设备的空间利用率、简化冷盘结构,本实用新型提供一种采用水冷方式进行降温的冷盘结构,将恒温循环水通入内部加工有循环水道的金属盘体内,在晶圆与冷盘表面接触时,通过循环水把晶圆的温度带走,完成晶圆的降温过程。同时,这种结构大大减少了冷盘的厚度和结构复杂性,因此多组冷盘可以堆叠摆放,节省空间。
[0005]
本实用新型解决其技术问题所采用的技术方案是:一种堆叠式晶圆快速降温装置,包括进水底座,进水底座与进、出水管连接,水管内通入具有稳定压力和流量的恒温冷却水,通过内部的水流通道构成一个液体的循环回路。
[0006]
上述的一种堆叠式晶圆快速降温装置,进水底座与制冷盘体连接,进水底座与制冷盘体之间使用密封圈进行防水密封;制冷盘体内部加工有螺旋状的水流通道,恒温冷却水流经制冷盘体内部通道,带走多余的热量;制冷盘体四周设置有限位挡柱,用以确保降温晶圆位于制冷盘体的中心位置;制冷盘体上表面加工有真空用环形沟槽,背面有气孔与上表面的沟槽联通。
[0007]
上述的一种堆叠式晶圆快速降温装置,制冷盘体之间使用盘体连接件连接,所述的盘体连接件内部有冷却水通道;所述的盘体连接件上、下表面设置有安装密封圈的沟槽;所述的盘体连接件上、下表面均可以与制冷盘体连接。
[0008]
本实用新型的有益效果是,本实用新型一种堆叠式晶圆快速降温装置采用恒温冷
却水的方式对制冷盘体进行降温,与其它降温方式相比极大地减化了制冷盘体的结构,减少了整个装置的占用空间。使用恒温冷却水的制冷方式,可方便地以堆叠的形式把多组制冷盘体组合在一起,提高了单位空间的利用效率。
附图说明
[0009]
下面结合附图和实施例对本实用新型进一步说明。
[0010]
图1为本实用新型示意图;
[0011]
图2为本实用新型内部循环通道示意图;
[0012]
图3为制冷盘体内部循环水管道示意图;
[0013]
图4为本实用新型取放晶圆示意图。
[0014]
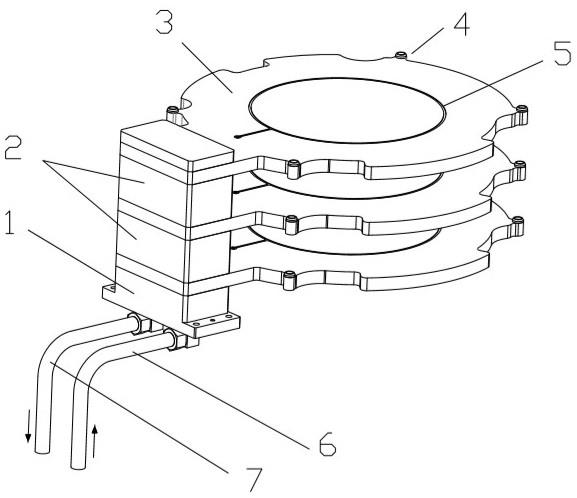
图中1.进水底座,2.盘体连接件,3.制冷盘体,4.限位挡柱,5.真空用环形沟槽,6.进水管,7.出水管,8.内部循环通道,9,冷却盘体内部通道,10.晶圆,11.机械手指。
具体实施方式
[0015]
一种堆叠式晶圆快速降温装置包括进水底座1,第一层制冷盘体3安装在进水底座1上,第一层与第二层制冷盘体3中间通过盘体连接件2连接,各个连接之间使用密封圈压紧密封。
[0016]
如图1所示,进水底座1与进水管6、出水管7连接;制冷盘体3四周设置有限位挡柱4,可限制晶圆10冷却时所处的位置;制冷盘体3上盘面设置有真空用环形沟槽5,连接到真空发生装置,当晶圆10送到制冷盘体3上以后,打开真空阀门,大气压力使得晶圆10紧紧吸附在制冷盘体3的上表面,提升冷却效率。
[0017]
如图2所示,恒温冷却水从进水管6流入,经过进水底座1流进制冷盘体3内;同时,经过盘体连接件2,流入第二层制冷盘体3内;恒温水在制冷盘体3内进行循环后,从另一个出口流出;所有从制冷盘体3流出的循环水汇流后,经进水底座1,从出水管7流出。
[0018]
如图3所示,制冷盘体3内部设置有螺旋状的冷却盘体内部通道9,所述通道均匀分布的制冷盘体3内部,流经的循环水充分带走制冷盘体3上的多余热量。
[0019]
如图4所示,机械手指11夹取晶圆10,送到制冷盘体3正上方,机械手指11下落至制冷盘体3下方,下落过程中,晶圆10落在制冷盘体3上,真空阀打开,开始冷却降温过程,机械手指11沿水平方向撤回,完成送入晶圆10过程;冷却过程结束后,机械手指11移动至制冷盘体3正下方,关闭真空阀,机械手指11垂直上升,托起晶圆10,直到机械手指11完全高出制冷盘体3后,机械手指11沿水平方向移出,完成取出晶圆10过程。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1