一种微型LED芯片与控制基板激光共晶焊接装置及方法与流程
一种微型led芯片与控制基板激光共晶焊接装置及方法
技术领域
1.本发明专利属于微型led技术领域,具体涉及一种微型led芯片与控制基板激光共晶焊接装置及方法。
背景技术:
2.micro led(微型led)技术,是led微缩矩阵化技术,指的是在一个芯片上集成的高密度微微米级的led阵列,其广泛应用于显示屏、可见光通信、智能便携设备等领域。性能稳定,寿命长等优势,同时也延续了led功耗低,反应速度快,对比度强等优点。同时也承继了led低功耗、色彩饱和度、反应速度快、对比度强等优点,micro led的亮度相较oled高30倍,能量消耗约为lcd的10%、oled的50%。
3.micro led未来将具有极大地应用前景,但是目前micro led制造成本问题,严重影响了其商用化的进程,原因主要就是巨量转移技术瓶颈仍然有待突破,传统的巨量转移是单颗转移单颗共晶焊接,单颗转移严重限制了micro led量产化进程,由于microled分辨率更高,很小的一块micro led显示屏中就含有大量的led晶片,比如一块0.39寸左右的micro led显示屏,其中含有的led晶片大概有240万颗,如果选用单颗转移的方法,特别耗时和耗费劳动力,难以实施,而单颗共晶焊接又会大大降低产品合格率,原因在于,单颗共晶焊接是将一颗led晶片转移过来后,通过加热控制基板,将其与控制基板焊接在一起,而下一颗led晶片转移过来后,又会整体加热控制基板,将第二颗led晶片与控制基板焊接在一起,而整体加热控制基板时又会导致第一颗led晶片的焊接点熔化。发生二次多次熔化的问题,对led晶片造成损坏,严重影响产品合格率。
4.为了解决这一问题,提出本发明。
技术实现要素:
5.本发明为了解决上述现有技术中存在的问题,本发明提供了一种micro
‑
led芯片的共晶方法,能够实现较大容量的芯片与控制基板共晶。主要在于以下几方面:1.本发明提出了采用高清摄像机采集micro led芯片与控制基板位置信息,配合高精度对位平台进行两者的高精度对位。2.本发明提出了采用无色透明的石英材料制成石英负压吸附装置作为micro led芯片取片固定装置3.本发明提出了采用激光加热完成micro led与控制基板的共晶焊接贴装制程。4.本发明共晶过程无需去掉micro led的蓝宝石衬板,直接被石英负压吸附装置吸附让设备完成共晶焊接工作。5.本发明采用模块转移激光加热共晶焊接的方法。激光平面光束透过石英负压吸附装置对已经对位固定好的micro led和控制基板加热焊接
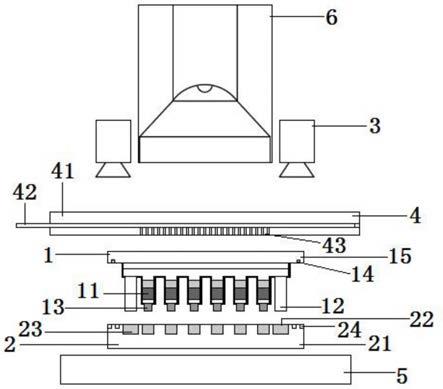
6.本发明第一方面提供一种微型led芯片与控制基板激光共晶焊接装置,目的在于利用激光同时将微型led芯片1中多个led晶片与控制基板2焊接到一起;
7.所述微型led芯片1包括芯片基板15以及固定于所述芯片基板15上的多个led晶片11;多个led晶片11具有共同的第一负电极12,且多个led晶片11分别具有独立的第一正电
极13;
8.所述控制基板2位于所述微型led芯片1的下方,其包括控制基板主体21以及位于所述控制基板主体21上的多个第二正电极22和一个第二负电极23;
9.所述激光共晶焊接装置包括:
10.负压吸附单元4,其用于吸取所述微型led芯片1,并将其放置在所述控制基板2上;
11.激光发射系统6,其位于所述微型led芯片1上方,其通过发射激光对多个所述第一正电极13和多个所述第二正电极22、以及一个所述第一负电极12和一个所述第二负电极23的焊接点加热,完成同时共晶焊接。
12.led晶片也就是通称的led灯珠,本质上就是led发光二极管。
13.优选地,所述第二正电极22的数量等于所述第一正电极13的数量;且所述第一正电极13与所述第二正电极22的位置对应,精度偏差小于0.7μm。
14.优选地,所述第一负电极12和所述第二负电极23均为一个,且成面状,多个所述led晶片11以共阴极的方式电连接到所述控制基板2上。
15.优选地,所述激光共晶焊接装置还包括图像采集单元3,其用于采集所述微型led芯片1和所述控制基板2的图像,所述图像采集单元3与外界电脑主机连接,可以将采集到的图像发送到外界电脑主机;所述图像采集单元3包括多个ccd相机。ccd相机采用可高分辨率摄像机,使定位更精确,图像采集更清晰。
16.优选地,所述负压吸附单元4包括负压吸附单元主体41、抽气口42和负压吸附孔43,所述抽气口42处连接有抽气装置,抽出所述负压吸附单元主体41内的空气,使所述负压吸附孔43处为负压环境,进而产生吸力,吸取所述微型led芯片1。负压吸附单元主体41中间为空腔,在空腔两侧面分别有抽气口42,使空腔内形成负压以吸附被测元器件。负压吸附单元吸附元器件的一面开负压吸附孔43。
17.其中,所述负压吸附单元主体41上具有抗红外反射或者抗激光反射的膜,防止红外或者激光被所述负压吸附单元主体41反射出去。从而使得,激光发射系统6,发出的激光,穿过负压吸附单元主体41,对多个所述第一正电极13和多个所述第二正电极22、以及一个所述第一负电极12和一个所述第二负电极23的焊接点加热,完成同时共晶焊接。这层膜是镀在石英(负压吸附单元主体41)上的,材料可以选自:一氧化硅、氟化镁、硫化锌等。
18.优选地,所述负压吸附单元主体41是透明的,选自石英、玻璃等透明材质;所述负压吸附孔43分布在所述芯片基板15的显示区域外的四周,且避开对位靶标点位置,所述负压吸附孔43所占面积小于所述芯片基板15的面积。高透光的石英材料可以使ccd高分辨相机更好的收集micro led原件上的定位靶标及micro led性能图像。负压吸附孔43分布在芯片基板15显示区域外的四周,如此可以避免因开孔(负压吸附孔43)对ccd高分辨相机对微型led芯片取样获取图像的影响。
19.对位靶标点即第一对位靶标14和第二对位靶标24。
20.优选地,所述芯片基板15上还具有第一对位靶标14,所述控制基板主体21上具有第二对位靶标24;所述第一对位靶标14和所述第二对位靶标24匹配,使得所述微型led芯片1和所述控制基板2对应,进而使得所述第一正电极13与所述第二正电极22电连接,所述第一负电极12与所述第二负电极23电连接。
21.优选地,所述第一对位靶标14为一个小正方形,所述第二对位靶标24为四个分离
的小正方形,其中四个分离的小正方形又两两并列形成中间具有空“十”字形的大正方形,四个分离的小正方形分别位于大正方形的四个角,所述第一对位靶标14的小正方形刚好可以装进空“十”字形的十字交叉点,且与外围的每一个所述第二对位靶标24的小正方形之间的间隙相等。
22.优选地,所述激光共晶焊接装置还包括精准对位平台5,所述精准对位平台5可以控制所述控制基板2在x、y、z、θ轴移动对位;
23.所述精准对位平台5也与外界的电脑主机连接,首先通过所述第一对位靶标14和所述第二对位靶标24使得所述微型led芯片1和所述控制基板2在位置上对应,所述图像采集单元3采集所述第一对位靶标14和所述第二对位靶标24处的图像,并将该图像信息反馈到外界的电脑主机,电脑主机根据该图像信息和设定值,通过调控精准对位平台5,进一步对所述第一对位靶标14和所述第二对位靶标24的位置进行调整。
24.本发明第二方面提供一种微型led芯片激光共晶焊接方法,使用本发明第一方面所述的激光共晶焊接装置,包括如下步骤:
25.a、所述负压吸附单元4吸取所述微型led芯片1,并将其放置在所述控制基板2上;
26.b、所述微型led芯片1与所述控制基板2对位并贴装在一起;
27.c、激光共晶焊接系统6工作对焊接点加热并完成焊接。
28.优选地,通过图像采集单元3和精准对位平台5完成所述微型led芯片1与所述控制基板2的对位。
29.激光共晶焊接法采用激光系统对焊接点接触的金属电极加热融化并贴装在一起,首先石英负压吸附装置从放料盒取料,通过高清摄像机采集micro led与控制基板位置信息,通过高精度对位平台对位。对位完成后高精度对位平台上升使micro led与控制基板贴附在一起。然后激光系统工作对焊接点加热,并最终使micro led与控制基板贴装焊接在一起。
30.相对于现有技术,本发明具有以下有益效果:
31.1、本发明采用激光加热温度可以精确控制加热区域温度,实现micro led模块化转移共晶焊接,避免了单颗microled单颗转移共晶焊接点二次融化,对microled造成损害。
32.2、本发明以micro led模块化以阵列的形式转移共晶焊接速度快,有效提高了共晶速度。
33.3、激光对micro led与控制基本表面的金属电极(insn)进行加热融化,最终使二者结合在一起,无需添加其他焊料。减少添加焊料工序,节省生产成本。
34.4、激光光束整形系统是将激光光束整形为能量密度分布均匀的平面光束,并与聚焦镜配合,使照射到共晶焊接平台上的激光光斑尺寸与共晶焊芯片尺寸相匹配。当共晶焊接芯片的尺寸改变更时,激光束尺寸也将对应更换调整。
35.5、本发明将多个所述led晶片11以共阴极的方式电连接到所述控制基板2上。
36.6、本发明自主设计了负压吸附单元4,用于吸取所述微型led芯片1,并将其放置在所述控制基板2上。采用负压吸附的方法,使micro led抓取更加方便,不易移位。进一步的,所述负压吸附单元主体41选自石英、玻璃等透光透明材料,由于负压吸附单元主体41的高透光率可以使高分辨率摄像定位精准且能准确采集micro led点亮信息。
37.7、本发明激光共晶焊接装置还包括对位靶标和精准对位平台5,所述图像采集单
元3和所述精准对位平台5均与外界的电脑主机连接,首先通过所述第一对位靶标14和所述第二对位靶标24使得所述微型led芯片1和所述控制基板2在位置上对应,所述图像采集单元3采集所述第一对位靶标14和所述第二对位靶标24处的图像,并将该图像信息反馈到外界的电脑主机,电脑主机根据该图像信息和设定值,通过调控精准对位平台5,进一步对所述第一对位靶标14和所述第二对位靶标24的位置进行调整,从而使微型led芯片和控制基板2对位准确。
38.8、本发明第一对位靶标14为一个小正方形,所述第二对位靶标24为四个分离的小正方形,其中四个分离的小正方形又两两并列形成中间具有空“十”字形的大正方形,四个分离的小正方形分别位于大正方形的四个角,所述第一对位靶标14的小正方形刚好可以装进空“十”字形的十字交叉点,且与外围的每一个所述第二对位靶标24的小正方形之间的间隙相等,且通过控制该间隙可以控制第一正电极13与所述第二正电极22对应的进准度或偏差值。第一对位靶标14和第二对位靶标24的形状可以精准控制微型led芯片和控制基板2位置在四个方向上均对应,且精度可以控制在小于0.7微米,限定小于0.7微米的原因在于,两个相邻的led晶片之间的间隙为0.74微米,保证偏移误差小于0.7微米,以保证所述第一正电极13与所述第二正电极22在位置上即便有些许不对应的时候,所述第一正电极13与应该与其对应的第二正电极22旁边的第二正电极22之间还是存在间隙的,以免发生短路。该对位靶标的形状设置非常关键,因为对于单颗led晶片的转移而言,由于单颗led晶片的尺寸较小,所以控制其转移到控制基板后的精度较容易,而对于微型led阵列而言,尺寸较大,控制其转移到控制基板后多个方位的精准度很难。本发明对位方法可以将精准度控制在0.7微米以下。
39.9.本发明共晶过程无需去掉micro led的蓝宝石衬板,直接被石英负压吸附装置吸附让设备完成共晶焊接工作。现有技术中通常是先去除蓝宝石衬板芯片基板后再将led晶片一颗颗正装的移动到控制基板上,本发明无需去掉micro led的蓝宝石衬板,直接被石英负压吸附装置吸附、倒装在控制基板上,然后让设备完成共晶焊接工作,有效提高了转移与共晶速度。
附图说明
40.图1为本发明微型led芯片与控制基板激光共晶焊接装置的结构示意图;
41.图2为本发明激光共晶焊接装置中控制基板2的俯视图,其中第一对位靶标14和第二对位靶标24未匹配;
42.图3为本发明第一对位靶标14和第二对位靶标24匹配后控制基板2的俯视图;
43.图4为本发明分检装置中负压吸附单元4的结构示意图;
44.图5为本发明分检装置中负压吸附单元4的俯视图;
45.图6为本发明分检装置中负压吸附单元4的左视图;
46.图7为本发明微型led芯片质量的检测方法流程图;
47.附图标记的名称为:1
‑
微型led芯片、11
‑
led晶片、12
‑
第一负电极、13
‑
第一正电极、14
‑
第一对位靶标、15
‑
芯片基板、2
‑
控制基板、21
‑
控制基板主体、22
‑
第二正电极、23
‑
第二负电极、24
‑
第二对位靶标、3
‑
图像采集单元、4
‑
负压吸附单元、41
‑
负压吸附单元主体、42
‑
抽气口、43
‑
负压吸附孔、5
‑
精准对位平台,6
‑
激光发射系统。
具体实施方式
48.下面结合实施例对本发明作进一步的详细描述。
49.本领域技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术或条件者,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。所用材料或设备未注明生产厂商者,均为可以通过购买获得的常规产品。
50.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”到另一元件时,它可以直接连接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”可以包括无线连接。
51.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。术语“内”、“上”、“下”等指示的方位或状态关系为基于附图所示的方位或状态关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
52.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”、“设有”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,根据具体情况理解上述术语在本发明中的具体含义。
53.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语包括技术术语和科学术语具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
54.实施例1
55.本实施例提供一种微型led芯片与控制基板激光共晶焊接装置,目的在于利用激光同时将微型led芯片1中多个led晶片与控制基板2焊接到一起;
56.所述微型led芯片1包括芯片基板15以及固定于所述芯片基板15上的多个led晶片11;多个led晶片11具有共同的第一负电极12,且多个led晶片11分别具有独立的第一正电极13;
57.所述控制基板2位于所述微型led芯片1的下方,其包括控制基板主体21以及位于所述控制基板主体21上的多个第二正电极22和一个第二负电极23;
58.所述激光共晶焊接装置包括:
59.负压吸附单元4,其用于吸取所述微型led芯片1,并将其放置在所述控制基板2上;
60.激光发射系统6,其位于所述微型led芯片1上方,其通过发射激光对多个所述第一正电极13和多个所述第二正电极22、以及一个所述第一负电极12和一个所述第二负电极23的焊接点加热,完成同时共晶焊接。
61.led晶片也就是通称的led灯珠,本质上就是led发光二极管。
62.所述第二正电极22的数量等于所述第一正电极13的数量;且所述第一正电极13与
所述第二正电极22的位置对应,精度偏差小于0.7μm。
63.所述第一负电极12和所述第二负电极23均为一个,且成面状,多个所述led晶片11以共阴极的方式电连接到所述控制基板2上。
64.所述激光共晶焊接装置还包括图像采集单元3,其用于采集所述微型led芯片1和所述控制基板2的图像,所述图像采集单元3与外界电脑主机连接,可以将采集到的图像发送到外界电脑主机;所述图像采集单元3包括多个ccd相机。ccd相机采用可高分辨率摄像机,使定位更精确,图像采集更清晰。
65.所述负压吸附单元4包括负压吸附单元主体41、抽气口42和负压吸附孔43,所述抽气口42处连接有抽气装置,抽出所述负压吸附单元主体41内的空气,使所述负压吸附孔43处为负压环境,进而产生吸力,吸取所述微型led芯片1。负压吸附单元主体41中间为空腔,在空腔两侧面分别有抽气口42,使空腔内形成负压以吸附被测元器件。负压吸附单元吸附元器件的一面开负压吸附孔43。
66.所述负压吸附单元主体41是透明的,选自石英透明材质;所述负压吸附孔43分布在所述芯片基板15的显示区域外的四周,且避开对位靶标点位置,所述负压吸附孔43所占面积小于所述芯片基板15的面积。高透光的石英材料可以使ccd高分辨相机更好的收集micro led原件上的定位靶标及micro led性能图像。负压吸附孔43分布在芯片基板15显示区域外的四周,如此可以避免因开孔(负压吸附孔43)对ccd高分辨相机对微型led芯片取样获取图像的影响。
67.对位靶标点即第一对位靶标14和第二对位靶标24。
68.所述芯片基板15上还具有第一对位靶标14,所述控制基板主体21上具有第二对位靶标24;所述第一对位靶标14和所述第二对位靶标24匹配,使得所述微型led芯片1和所述控制基板2对应,进而使得所述第一正电极13与所述第二正电极22电连接,所述第一负电极12与所述第二负电极23电连接。
69.所述第一对位靶标14为一个小正方形,所述第二对位靶标24为四个分离的小正方形,其中四个分离的小正方形又两两并列形成中间具有空“十”字形的大正方形,四个分离的小正方形分别位于大正方形的四个角,所述第一对位靶标14的小正方形刚好可以装进空“十”字形的十字交叉点,且与外围的每一个所述第二对位靶标24的小正方形之间的间隙相等。
70.所述激光共晶焊接装置还包括精准对位平台5,所述精准对位平台5可以控制所述控制基板2在x、y、z、θ轴移动对位;
71.所述精准对位平台5也与外界的电脑主机连接,首先通过所述第一对位靶标14和所述第二对位靶标24使得所述微型led芯片1和所述控制基板2在位置上对应,所述图像采集单元3采集所述第一对位靶标14和所述第二对位靶标24处的图像,并将该图像信息反馈到外界的电脑主机,电脑主机根据该图像信息和设定值,通过调控精准对位平台5,进一步对所述第一对位靶标14和所述第二对位靶标24的位置进行调整。
72.微型led芯片激光共晶焊接方法,使用本实施例所述的激光共晶焊接装置,包括如下步骤:
73.a、所述负压吸附单元4吸取所述微型led芯片1,并将其放置在所述控制基板2上;
74.b、所述微型led芯片1与所述控制基板2对位并贴装在一起;
75.c、激光共晶焊接系统6工作对焊接点加热并完成焊接。
76.通过图像采集单元3和精准对位平台5完成所述微型led芯片1与所述控制基板2的对位。
77.激光共晶焊接法采用激光系统对焊接点接触的金属电极加热融化并贴装在一起,首先石英负压吸附装置从放料盒取料,通过高清摄像机采集micro led与控制基板位置信息,通过高精度对位平台对位。对位完成后高精度对位平台上升使micro led与控制基板贴附在一起。然后激光系统工作对焊接点加热,并最终使micro led与控制基板贴装焊接在一起。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1