高精度黏晶系统、对位系统及其方法与流程
1.一种高精度黏晶系统、对位系统及其方法,尤指一种能够提升洁净度与黏晶精度的系统与方法。
背景技术:
2.现有的黏晶技术利用真空吸取装置吸取至少一晶粒,再将所吸取的晶粒移动至一所欲黏合的位置处,如晶圆、晶粒、载板。真空吸取装置再将晶粒黏合于所欲黏合的位置处。
3.然真空吸取装置于吸取晶粒处至所欲黏合的位置处进行长距离的位移。对于要求洁净度的黏晶制程而言,该长距离的位移会因装置与装置之间的摩擦而产生有微尘,该微尘恐会损及洁净度。
4.如上所述,如何提升洁净度,或者缩短真空吸取装置的移动距离,或者改变真空吸取装置的位置,其就有可改善的空间。
技术实现要素:
5.有鉴于此,本发明主要目的在于,提出一种本发明提出一种高精度黏晶系统、对位系统及其方法,其避免系统的位移装置于晶圆或晶粒上方动作,以提升洁净度的目的。
6.本发明为达成上述目的提供一种高精度黏晶系统,包括:一供应单元,用来设置一晶粒;一承接单元,相邻于该供应单元;一中继单元,设于该供应单元与该承接单元之间;一吸取单元,设于该供应单元的上方,该吸取单元将该晶粒放置于该中继单元;以及一黏合总成,设于该承接单元的上方;其中,该黏合总成将位于该中继单元的该晶粒放置于该承接单元。
7.综合上述,本发明的高精度黏晶系统及其方法,其将系统的位移装置设于供应单元或承接单元的非正上方或下方,故第一中继台或第二中继台移动时,其所可能产生的微尘无法掉落于供应单元或承接单元,以提升洁净度。至于真空模块,由于只有上下的运动,并无侧向移位运动或仅微小的向移位,只要以隔离板做适当隔离,即可防止微尘由上方掉落至承接单元。
附图说明
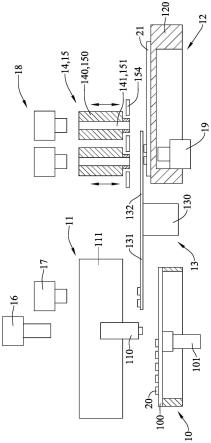
8.图1为本发明第一实施例的一种高精度黏晶系统的示意图。
9.图2为本发明第一实施例的一种高精度黏晶系统的局部示意图。
10.图3为本发明第二实施例的一种高精度黏晶方法的流程示意图。
11.图4为一黏合记号与一晶粒记号的对位示意图。
12.图5为本发明第三实施例的一种高精度黏晶系统的示意图。
13.图6为本发明第三实施例的一种高精度黏晶系统的局部示意图。
14.图7为本发明第四实施例的一种高精度黏晶系统的示意图。
15.图8为本发明第四实施例的一种高精度黏晶系统的局部示意图。
16.图9为本发明第五实施例的一种用于高精度黏晶的对位系统。
17.附图标记说明:10、10a、10b-供应单元;100、100a-供应台;101、101a-顶针;11、11a、11b-吸取单元;110、110a、110b-真空模块;111、111a、111b-吸取位移模块;12、12a、12b-承接单元;120-承台;13、13a、13b-中继单元;130、130a、130b-位移模块;131、131a、131b-第一中继台;132、132b-第二中继台;14、14a、14b-第一黏合单元;140、140a-第一真空模块;141-第一透明模块;15、15a、15b-第二黏合单元;150、150a-第二真空模块;151-第二透明模块;154-隔离板;16、16a、16b-第一上视觉单元;17、17a、17b-第二上视觉单元;18、18a、18b-第三上视觉单元;19、19a、19b-下视觉单元;20、20a、20b、30-晶粒;200、300-晶粒记号;301-透明区;21、31-欲黏合件;210、310-黏合记号;s1~s7-步骤;40-上视觉单元;41-黏合单元;410-真空模块;411-透明模块;42-承接单元;420-承台;43-下视觉单元。
具体实施方式
18.本发明第一实施例为一种高精度黏晶系统,如图1与图2所示,高精度黏晶系统具有一供应单元10、一吸取单元11、一承接单元12、一中继单元13、一黏合总成、一第一上视觉单元16、一第二上视觉单元17、一第三上视觉单元18与一下视觉单元19。
19.供应单元10具有一供应台100与至少一顶针101。供应台100用来设置至少一晶粒20。顶针101设于供应台100的下方,顶针101可为单一或多个。若为单一顶针101,顶针101顶出设置于供应台100的单一晶粒20。若为多个顶针101,顶针101顶出设于供应台100的多个晶粒20。该供应台100可进行一横向移动、一前后移动或一横向与前后移动。
20.吸取单元11具有至少一真空模块110与一吸取位移模块111。真空模块110设于吸取位移模块111,并且位于供应单元10的上方。吸取位移模块111可进行一横向移动、一前后移动或一纵向移动。
21.承接单元12相邻于供应单元10。承接单元12具有一承台120,承台120可为透明或部分透明以利影像的穿透与撷取。承台120可进行一横向移动、一前后移动或一横向与前后移动。承台120供一欲黏合件21设置,该欲黏合件21为透明,并具有黏合记号210。该欲黏合件21为晶圆、晶粒、载板。
22.中继单元13位于供应单元10与承接单元12之间。中继单元具有一位移模块130、一第一中继台131与一第二中继台132。第一中继台131与第二中继台132设于位移模块130的两相对端。于本实施例的中继单元13为一双翼设计。该位移模块130可进行一前后移动、一横向移动或一旋转移动。第一中继台131与第二中继台132呈一平行排列。
23.黏合总成包含有一第一黏合单元14与第二黏合单元15。第一黏合单元14位于承接单元12的上方。第一黏合单元14具有至少一第一真空模块140。第一真空模块140具有一第一透明模块141。第一透明模块141可为一透明体或一穿孔。
24.第二黏合单元15位于承接单元12的上方,并且相邻于第一黏合单元14。第二黏合单元15具有至少一第二真空模块150。第二真空模块150具有至少一第二透明模块151。第二透明模块151可为一透明体或一穿孔。本发明的黏合总成的第一黏合单元14与第二黏合单元是15不动或不做大行程移动,可装置隔离板154,故可减少污染。
25.第一上视觉单元16设于吸取单元11与供应台100的上方。若更进一步论述,第一上视觉单元16位于真空模块110的上方。第一上视觉单元16可具有至少一视觉模块。
26.第二上视觉单元17设于中继单元13的上方。若更进一步论述,第二上视觉单元17位于第一中继台131或第二中继台132的上方,并且相邻于供应单元10。第二上视觉单元17可具有至少一视觉模块。
27.第三上视觉单元18位于第一黏合单元14与第二黏合单元15的上方。第三上视觉单元18具有至少一视觉模块,各视觉模块位于第二真空模块150或第一真空模块140的上方。
28.下视觉单元19位于承接单元12的下方。若更进一步论述,下视觉单元19具有至少一视觉模块。下视觉单元19位于承台120的下方。若第一上视觉单元16、第二上视觉单元17、第三上视觉单元18与下视觉单元19使用红外线感测相机,晶粒与欲黏合件不一定要有透明区,只要是硅材质或是红外线可以穿透的材料,一样可以取像与对位。
29.本发明第二实施例为一种高精度黏晶方法,如图3所示。
30.步骤s1,提供至少一晶粒。如图1与图2所示,顶针101顶出位于供应台100所欲顶出的晶粒20。第一上视觉单元16撷取被顶出的晶粒20的影像信息,并将该影像信息传送给吸取单元20。吸取单元11的真空模块110依据影像信息,以吸取晶粒20。真空模块110吸取至少一晶粒20或多个晶粒20。
31.若更进一步论述,供应单元10的供应台100进行一前后位移、一横向位移或一横向与前后移动,以将欲被吸取的晶粒20移动至真空模块110的下方。
32.待欲被吸取的晶粒20移动真空模块110的下方后,第一上视觉单元16撷取所欲顶出的晶粒20的影像信息,顶针101依据该影像信息,以顶出晶粒20。
33.第一上视觉单元16撷取被顶出的晶粒20的影像信息,并将该影像信息传送给吸取单元20。吸取单元11的真空模块110依据影像信息,以吸取晶粒20。
34.步骤s2,将至少一晶粒转移至一中继单元。吸取位移模块111将吸取有晶粒20的真空模块110移动至中继单元13的第一中继台131的上方。
35.第二上视觉单元17撷取晶粒20与中继单元13的第一中继台131的影像信息,并将影像信息传送给吸取单元11,以使真空模块110将晶粒20放置于第一中继台131。
36.待真空模块110将晶粒20放置于第一中继台131后,吸取位移模块111将真空模块110移回至最初位置,以再次吸取晶粒20。
37.位移模块130进行一旋转动作,以使第一中继台131被转动至承台120的上方,以及第二中继台132被转动至供应台100的上方。位移模块130再将第一中继台131移动至第一黏合单元14的下方。
38.步骤s3,对位至少一晶粒与承接单元的位置。第三上视觉单元18撷取晶粒20的影像信息,并将该影像信息提供给第一黏合单元14,以使第一真空模块140吸取位于第一中继台131的晶粒20。
39.待第一真空模块140吸取晶粒20后,承台120对第一真空模块120进行一位置调整,以使承台120的欲黏合件21可移动至所欲放置晶粒20的位置。该位置调整为横向位移、一前后位移或一横向与前后位移。
40.待承台120停止移动后,请配合参考图4所示,第三上视觉单元18透过第一透明模块141,以撷取位于晶粒20的晶粒记号200与欲黏合件21的黏合记号210的上影像信息。
41.下视觉单元19透过承台120,以撷取黏合记号210与晶粒记号200的下影像信息。该承台为透明或部分透明,以利影像的穿透与撷取。
42.该上影像信息与该下影像信息可判断晶粒20是否位于承台120的所欲放置晶粒20的位置处。
43.若为是,则至步骤s5。
44.若为否,第一真空模块140进行一位置调整,以使晶粒记号200对位黏合记号210。该位置调整可为一角度转动、一轴向移动或一横向移动。第三上视觉单元18再次撷取上影像信息,以及下视觉单元19再次撷取下影像信息,以判断晶粒20是否位于承台120的所欲放置晶粒20的位置处。
45.若由再次撷取的上影像信息的下影像信息判读出,晶粒记号200已对位黏合记号210,则至步骤s5。
46.步骤s4,再次提供至少一晶粒。供应单元10的供应台100进行一横向移动、一前后移动或一横向与前后移动,以将欲被吸取的晶粒20移动至真空模块110的下方。
47.待欲被吸取的晶粒20移动真空模块110的下方后,第一上视觉单元16撷取所欲顶出的晶粒20的影像信息,顶针101依据该影像信息,以再次顶出晶粒20。
48.第一上视觉单元16撷取被顶出的晶粒20的影像信息,并将该影像信息传送给吸取单元20。吸取单元11的真空模块110依据影像信息,以吸取晶粒20。
49.位移模块130将第二中继台132动至吸取有晶粒20的真空模块110的下方。
50.步骤s5,将至少一晶粒放置于承接单元。如步骤s3所述。第一黏合单元14的第一真空模块140将所吸取的晶粒20放置于承接单元12的承台120的欲黏合件21。
51.步骤s6,再次将至少一晶粒转移至中继单元。如步骤s4所述,吸取单元11将所吸取的晶粒20放置于第二中继台132。
52.步骤s7,再次对位至少一晶粒与承接单元的位置。第三上视觉单元18撷取晶粒20的影像信息,并将该影像信息提供给第二黏合单元15,以使第二真空模块140吸取位于第二中继台132的晶粒20。
53.待第二真空模块150吸取晶粒20后,承台120对第二真空模块150进行一位置调整,以使承台120可移动至所欲放置晶粒20的位置。该位置调整可为一横向移动、一前后移动或一横向与前后移动。
54.待承台120移动至所欲放置晶粒20的位置后,第三上视觉单元18透过第二黏合单元15的第二透明模块151,以撷取晶粒记号200与黏合记号210的上影像信息。下视觉单元19透过承台12,以撷取晶粒记号200与黏合记号210的下影像信息。
55.通过上影像信息与下影像信息,以判断晶粒记号200与黏合记号210是否对位,若已对位,则第二黏合单元15将晶粒20放置于承台12。若未对位,则第二黏合单元15的第二真空模块150进行位置调整,以将晶粒记号200对位黏合记号210。该位置调整为一角度旋转、一横向移动或一前后移动,并再次撷取上影像信息与下影像信息,以判断晶粒20是否位于承台120的所欲放置晶粒的位置处,即欲黏合件21。
56.若由再次撷取的上影像信息的下影像信息判读出,晶粒记号200已对位黏合记号210,第二黏合单元15的第二真空模块150将晶粒20放置于承台120的所欲放置晶粒的位置处,即欲黏合件21。
57.若第二黏合单元14已将晶粒20放置于承台12的欲黏合件21后,则回至步骤s1。
58.本发明第三实施例为一种高精度黏晶系统,如图5与图6所示,高精度黏晶系统具
有一供应单元10a、一吸取单元11a、一承接单元12a、一中继单元13a、一第一黏合单元14a、第二黏合单元15a、一第一上视觉单元16a、一第二上视觉单元17a、一第三上视觉单元18a与一下视觉单元19a。
59.于第三实施例中,供应单元10a、吸取单元11a、承接单元12a、中继单元13a、第一黏合单元14a、第二黏合单元15a、第上视觉单元16a、第二上视觉单元17a、第三上视觉单元18a与下视觉单元19a的设置方式如同上述的本发明的高精度黏晶系统的第一实施例,故不于此多做赘述,特先陈明。
60.第三实施例与上述的第一实施例的差异在于,中继单元13a仅具有一第一中继台131a与一位移模块130a,第一中继台131a设于位移模块130a的一侧,而使本实施例的中继单元13a为一单翼设计。
61.本发明第二实施例的一种高精度黏晶方法,如图3所示。
62.步骤s1,提供至少一晶粒。如图5所示,顶针101a顶出位于供应台100a所欲顶出的晶粒20a。第一上视觉单元16a撷取被顶出的晶粒20a的影像信息,并将该影像信息传送给吸取单元20a。吸取单元11a的真空模块110a依据影像信息,以吸取晶粒20a。真空模块110a吸取至少一晶粒20a或多个晶粒20a。
63.步骤s2,将至少一晶粒转移至一中继单元。吸取位移模块111a将吸取有晶粒20a的真空模块110a移动至中继单元13a的第一中继台131a的上方。
64.第二上视觉单元17a撷取晶粒20a与中继单元13a的第一中继台131a的影像信息,并将影像信息传送给吸取单元11a,以使真空模块110a将晶粒20a放置于第一中继台131a。
65.待真空模块110a将晶粒20a放置于第一中继台131a后,吸取位移模块111a将真空模块110a移回至最初位置,以再次吸取晶粒20a。
66.步骤s3,对位至少一晶粒与一承接单元的位置。其如上述的本发明的高精度黏晶方法所述的步骤s3,故不于此多做赘述,特先陈明。
67.步骤s4,再次提供至少一晶粒。供应单元10a的供应台100a进行一横向移动、一前后移动或一横向与前后移动,以将欲被吸取的晶粒20a移动至真空模块110a的下方。
68.待欲被吸取的晶粒20a移动真空模块110a的下方后,第一上视觉单元16a撷取所欲顶出的晶粒20a的影像信息,顶针101a依据该影像信息,以顶出晶粒20a。
69.第一上视觉单元16a撷取被顶出的晶粒20a的影像信息,并将该影像信息传送给吸取单元20a。吸取单元11a的真空模块110a依据影像信息,以吸取晶粒20a。
70.位移模块130a将第一中继台131a移动至吸取有晶粒20a的真空模块110a的下方。
71.步骤s5,将至少一晶粒放置于承接单元。其如上述的本发明的高精度黏晶方法所述的步骤s5,故不于此多做赘述,特先陈明。
72.步骤s6,再次将至少一晶粒转移至中继单元。吸取单元11a真空模块110a将所吸取的晶粒20a置于第一中继台131a。
73.步骤s7,再次对位至少一晶粒与一承接单元的位置。第三上视觉单元18a撷取晶粒20a的影像信息,并将该影像信息提供给第二黏合单元15a,以使第二真空模块140a吸取位于第一中继台131a的晶粒20a。
74.待第二真空模块150a吸取晶粒20a后,承台120a对第二真空模块150a进行位置调整,以使承台120a可移动至所欲放置晶粒20a的位置,即欲黏合件21a。
75.如步骤s3所述,通过该上影像信息与该下影像信息可判断晶粒20a是否位于承台120a的所欲放置晶粒的位置处。以将晶粒放置于承台120a的欲黏合件21a。
76.通过上影像信息与下影像信息,以判断晶粒记号与黏合记号是否对位,若已对位,则第二黏合单元15a将晶粒20a放置于承台12a。若未对位,则第二黏合单元15a的第二真空模块150a进行一位置调整,以将晶粒记号对位黏合记号。该位置调整为角度旋转、一横向移动或一前后移动。并再次撷取上影像信息与下影像信息,以判断晶粒20a是否位于承台120a的所欲放置晶粒的位置处。
77.若由再次撷取的上影像信息的下影像信息判读出,晶粒记号已对位黏合记号,第二黏合单元15a的第二真空模块150a将晶粒20a放置于承台120a的所欲放置晶粒的位置处。
78.若第二黏合单元14a已将晶粒20a放置于承台12a后,则回至步骤s1。
79.本发明第四实施例为一种高精度黏晶系统,如图7与图8所示,高精度黏晶系统具有一供应单元10b、一吸取单元11b、一承接单元12b、一中继单元13b、一第一黏合单元14b、第二黏合单元15b、一第一上视觉单元16b、一第二上视觉单元17b、一第三上视觉单元18b与一下视觉单元19b。
80.于第四实施例中,供应单元10b、吸取单元11b、承接单元12b、中继单元13b、第一黏合单元14b、第二黏合单元15b、第上视觉单元16b、第二上视觉单元17b、第三上视觉单元18b与下视觉单元19b的设置方式如同上述的本发明的高精度黏晶系统的第第一实施例,故不于此多做赘述,特先陈明。
81.第四实施例与上述的第一实施例的差异在于,中继单元13b具有一第一中继台131b、一第二中继台132b与一位移模块130b,第一中继台131b与第二中继台132b设于位移模块130b的两相对侧,第一中继台131b与第二中继台132b为一错位排列,而使本实施例的中继单元13b为一错位设计。
82.本发明第二实施例的一种高精度黏晶方法,如图3所示。
83.步骤s1,提供至少一晶粒。其如上述的本发明的高精度黏晶方法所述的步骤s1,故不于此多做赘述,特先陈明。
84.步骤s2,将至少一晶粒转移至一中继单元。吸取位移模块111b将吸取有晶粒20b的真空模块110b移动至中继单元13b的第一中继台131b的上方。
85.第二上视觉单元17b撷取晶粒20b与中继单元13b的第一中继台131b的影像信息,并将影像信息传送给吸取单元11b,以使真空模块110b将晶粒20b放置于第一中继台131b。
86.待真空模块110b将晶粒20b放置于第一中继台131b后,吸取位移模块111b将真空模块110b移回至最初位置,以再次吸取晶粒20b。
87.位移模块130b使第一中继台131b移动至承台120b的上方,以及移动第二中继台132b至供应台100b的上方。位移模块130b再将第一中继台131b移动至第一黏合单元14b的下方。
88.于本实施例中,步骤s3至步骤s7如上述的本发明的高精度黏晶方法所述的步骤s3至步骤s7,故不于此多做赘述,特先陈明。
89.图9为本发明第五实施例的一种用于高精度黏晶的对位系统,图9显示黏合记号与一晶粒记号的对位。本发明的用于高精度黏晶的对位系统,适用一具有晶粒记号300的晶粒30,该对位系统包含有一上视觉单元40、一黏合单元41、一承接单元42与一下视觉单元43。
90.黏合单元41具有一真空模块410,真空模块410具有一透明模块411。透明模块411为一透明体或一穿孔。
91.上视觉单元40设于黏合单元41的上方。
92.承接单元42具有一承台420。承台420为透明。承台420供一欲黏合件31设置,欲黏合件31为透明,欲黏合件31具有至少一黏合记号310。
93.上述的晶粒30具有至少一透明区301,晶粒记号300位于该透明区301。
94.如上所述,真空模块410吸取晶粒30。上视觉单元40透过透明模块411与透明区301,以撷取晶粒记号301与黏合记号310的上影像信息。下视觉单元43通过承台420与欲黏合件31,以撷取黏合记号310与晶粒记号301的下影像信息。通过该上影像信息与该下影像信息,而得知晶粒30是否对位承台420的欲黏合件31。用于高精度黏晶的对位系统须精密对位时,将该黏合单元41侧移或将该承台420侧移来进行对位,达成该晶粒30与该欲黏合件31的精密对位。
95.综合上述,本发明的高精度黏晶系统及其方法,其将系统的位移装置设于供应单元或承接单元的非正上方或下方,故真空模块、第一中继台或第二中继台移动时,其所可能产生的微尘无法掉落于供应单元或承接单元,以提升洁净度。
96.另外,第一真空模块或第二真空模块的移动距离甚小,故可能产生的微尘甚微,故亦可保持洁净度。
97.再者,本发明的中继单元、第一黏合单元与第二黏合单元的设计可一次提供至少一晶粒给承接单元,以提升黏晶的速率。
98.再一,本发明所使用的对位方法运用晶粒记号与黏合记号之间的对位,故可提升黏晶的精度。
99.再二,本发明的黏合总成的第一黏合单元与第二黏合单元是不动或不做大行程移动,可装置隔离板,故可减少污染。同时为了精度,黏合总成的第一黏合单元与第二黏合单元可微小的横向移动。因此本发明具有低污染与高精度的特性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1