制动器、电机和机器人的制作方法
1.本技术涉及电机技术领域,具体涉及一种制动器、电机和机器人。
背景技术:
2.随着机器人的小型化发展,市场对电机的小型化要求越来越高。各大电机厂家都在努力实现自身产品小型化,争取将电机功率密度做到最大。
3.机器人有很多关节需求有制动器的伺服电机,制动器是伺服电机的重要部件,其工作时需要额外的电源供给,所以制动器的耗电成为影响机器人运行效率的一部分,降低制动器使用功率是提高电机功率密度和提高机器人效率的重要方法。
技术实现要素:
4.因此,本技术要解决的技术问题在于提供一种制动器、电机和机器人,能够降低制动器的耗电,提高电机的功率密度,提高机器人效率。
5.为了解决上述问题,本技术提供一种制动器,包括定子磁轭,定子磁轭包括定子线槽,定子磁轭的底部设置有凸起,凸起向着远离定子线槽的方向凸出,凸起的内侧壁位于定子线槽的内侧壁内周侧,凸起的外侧壁位于定子线槽的内侧壁和外侧壁之间。
6.优选地,定子线槽的底部厚度为w1,凸起的外侧壁与定子磁轭的中心轴线的最大距离为c/2,定子线槽的内侧壁与定子磁轭的中心轴线的最大距离为a/2,a+w1/10≤c≤a+2*w1。
7.优选地,凸起为环形凸起。
8.优选地,定子磁轭包括轴孔,轴孔的直径为b,定子线槽的底部厚度为w1,凸起的内侧壁与定子磁轭的中心轴线的最大距离为d/2,b≤d≤a
‑
w1/10。
9.优选地,定子线槽内设置有定子绕组。
10.优选地,制动器还包括动子磁轭,动子磁轭与定子磁轭之间设置有限位柱,动子磁轭沿限位柱的导向滑动。
11.优选地,制动器还包括限位挡板,限位挡板设置在动子磁轭远离定子磁轭的一端。
12.优选地,限位柱中空,限位挡板上设置有定位螺钉,定位螺钉穿设在限位柱内,并与定子磁轭固定连接。
13.优选地,限位挡板与动子磁轭之间设置有摩擦片。
14.根据本技术的另一方面,提供了一种电机,包括制动器,该制动器为上述的制动器。
15.优选地,电机包括端盖,端盖朝向定子磁轭的一端设置有环形凹槽,凸起安装在环形凹槽内。
16.根据本技术的另一方面,提供了一种机器人,包括制动器,该制动器为上述的制动器。
17.本技术提供的制动器,包括定子磁轭,定子磁轭包括定子线槽,定子磁轭的底部设
置有凸起,凸起向着远离定子线槽的方向凸出,凸起的内侧壁位于定子线槽的内侧壁内周侧,凸起的外侧壁位于定子线槽的内侧壁和外侧壁之间。该制动器对定子磁轭的磁场密度分布不均的位置进行了结构改进,利用该位置增加的凸起来调节定子磁轭在该位置的磁场密度分布状态,使得该位置处的磁场密度大大降低,分布更加均匀,降低了制动器磁阻,进而降低了制动器的运行功率,大大减小了制动器耗电量,提高了电机功率密度和运行效率,提高了机器人效率。
附图说明
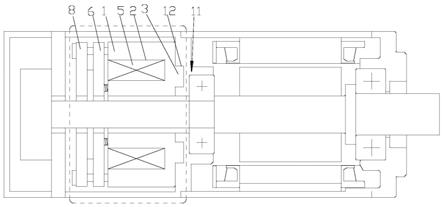
18.图1为本技术一个实施例的制动器的结构示意图;
19.图2为本技术一个实施例的制动器的尺寸结构图;
20.图3为本技术一个实施例的制动器的磁场强度分布图;
21.图4为本技术一个实施例的制动器的功率与c的关系图;
22.图5为本技术一个实施例的制动器的功率与d的关系图;
23.图6为相关技术的制动器的分解结构示意图;
24.图7为相关技术的制动器的剖视结构示意图;
25.图8为相关技术的制动器的磁力线走势图;
26.图9为相关技术的制动器的磁场强度分布图。
27.附图标记表示为:
28.1、定子磁轭;2、定子线槽;3、凸起;4、轴孔;5、定子绕组;6、动子磁轭;7、限位柱;8、限位挡板;9、定位螺钉;10、摩擦片;11、端盖;12、环形凹槽;13、弹簧。
具体实施方式
29.结合参见图6至图9所示,在相关技术中,制动器整体结构如图6所示。包括定子磁轭1、动子磁轭6、定子绕组5、弹簧13、摩擦片10、限位挡板8、限位柱7和定位螺钉9等。限位挡板8与定子磁轭1间通过限位柱7的长度确定两者间的距离,定位螺钉9穿过限位柱7最终锁在定子磁轭1上(定子磁轭1设计螺纹与定位螺钉9连接),最终限位挡板8与定子磁轭1的间距等于限位柱7的长度。定子磁轭1、定子绕组5、限位挡板8、限位柱7和定位螺钉9为不动部分,动子磁轭6和摩擦片10为可活动部分。传统制动器整体结构平面示意图如图7所示。
30.制动器工作原理如下:定子绕组5不通电时,制动器通过弹簧力f1将动子磁轭6推至与摩擦片10接触,定子磁轭1和动子磁轭6间有空气间隙,摩擦片10受到限位挡板8的限位作用与限位挡板8贴合。最终动子磁轭6与摩擦片10间的挤压力等于制动器的弹簧力f1,挤压力与摩擦片10和动子磁轭6间的摩擦系数共同作用产生制动转矩,摩擦片10与电机轴通过粘接、键或者其他形式固定在一起。制动转矩最终作用在电机轴上实现电机制动。定子绕组5通电时,电流产生电磁场,涉及电磁场的制动器结构是定子磁轭1和动子磁轭6,制动器磁场磁路走向如图8所示。定子磁轭1与动子磁轭6间产生的电磁吸力f2克服弹簧力f1,最终将动子磁轭6拉至与定子磁轭1贴合(此时空气间隙为0),最终实现动子磁轭6与制动器的摩擦片10的分离,电机轴不再受到制动作用,电机轴实现自由旋转。
31.定子磁轭1、定子绕组5和动子磁轭6组成制动器最基本的电磁结构。当定子绕组5通过电流时,定子磁轭1和动子磁轭6就会产生磁通,若不考虑漏磁通,磁通路径将由定子磁
轭1底部
→
定子磁轭1外部
→
定子磁轭1外部空气隙
→
动子磁轭6
→
定子磁轭1内部空气隙
→
定子磁轭1内部形成回路。
32.动子磁轭6在吸合、释放过程中,空气间隙不断变化,磁路各部件的磁饱和程度也不相同。
33.制动器工作时的定子磁轭1的磁场强弱分布如图9,在靠近定子磁轭1底部和内环外径位置磁场分布密集(如图中q圈出位置),此位置磁场密度可能达到其他位置磁场密度的1.5倍以上。磁场密度大导致制动器整体磁阻增大,最终使制动器需求的电源功率更大,耗电量更大。
34.为解决传统制动器工作磁场密度分布不均匀导致制动器耗电量大且电机功率密度低的问题,基于上述的分析,特提出本技术。
35.结合参见图1至图5所示,根据本技术的实施例,制动器包括定子磁轭1,定子磁轭1包括定子线槽2,定子磁轭1的底部设置有凸起3,凸起3向着远离定子线槽2的方向凸出,凸起3的内侧壁位于定子线槽2的内侧壁内周侧,凸起3的外侧壁位于定子线槽2的内侧壁和外侧壁之间。
36.由上述分析可知,定子磁轭1的磁场分布密集部位主要集中在在靠近定子磁轭1底部和内环外径的位置,因此,可以通过对此处的结构进行改造,来改善这一状况。
37.结合参见图3所示,本实施例中制动器对定子磁轭1的磁场密度分布不均的位置(即q位置)进行了结构改进,利用该位置增加的凸起3来调节定子磁轭1在该位置的磁场密度分布状态,分散该位置的磁力线分布,使得该位置处的磁场密度大大降低,分布更加均匀,降低了制动器磁阻,进而降低了制动器的运行功率,大大减小了制动器耗电量,提高了电机功率密度和运行效率,提高了机器人效率。
38.凸起3的设置同时会带来制动器体积的增大与材料的浪费。综合考虑凸起3的磁场利用率和制动器及电机的结构体积,需要优化设计凸起3的结构尺寸。
39.在一个实施例中,凸起3为环形凸起。
40.磁力线走向及磁场密度的分布与制动器的定子磁轭1的定子线槽2的内圆直径a、轴孔直径b、制动器的定子磁轭1的底部结构厚度w1以及凸起3的外径c、凸起3的内径d等相关。
41.制动器输出电磁力f2的计算方法如下(其中i为电流,n为与气隙、制动器动子磁轭等相关的修正系数):
[0042][0043]
图9所示的磁场分布密集区位于与轴线ll平行的两条直线l1和l2之间,l1与中心轴ll的距离为h1,l2与中心轴ll的距离为h2。经过磁场密度分析与电磁力f的计算,l1与中心轴ll的距离为h1小于等于(a+2*w1)/2,且大于等于(a+w1/10)/2;l2与中心轴ll的距离为h2小于等于(a
‑
w1/10)/2,且大于等于b/2。
[0044]
因此,本技术实施例的凸起3只要处于l1与l2之间就能够分散制动器定子磁轭1的底部位置磁场,降低制动器功率,提高制动器效率,提高电机功率密度。
[0045]
在一个实施例中,定子线槽2的底部厚度为w1,凸起3的外侧壁与定子磁轭1的中心轴线的最大距离为c/2,定子线槽2的内侧壁与定子磁轭1的中心轴线的最大距离为a/2。经
过分析,制动器消耗功率与c的关系如图4所示,c越大制动器消耗功率越小。经评估当a+w1/10≤c≤a+2*w1时,制动器功率得到大幅度降低、凸起结构的磁场利用率最高且电机功率密度最大,与上文得出结论相一致。
[0046]
在一个实施例中,定子磁轭1包括轴孔4,轴孔4的直径为b,定子线槽2的底部厚度为w1,凸起3的内侧壁与定子磁轭1的中心轴线的最大距离为d/2。制动器功率与d的关系如图5所示,d越小制动器功率越小。当b≤d≤a
‑
w1/10时,制动器功率得到大幅度降低、凸起结构的磁场利用率最高且电机功率密度最大,与上文得出结论相一致。
[0047]
所以,当a+w1/10≤c≤a+2*w1且b≤d≤a
‑
w1/10时凸起3能够起到最大化的磁场分散效果,凸起3的材料利用率最高,制动器功率得到大幅度下降。
[0048]
在一个实施例中,定子线槽2内设置有定子绕组5。
[0049]
在一个实施例中,制动器还包括动子磁轭6,动子磁轭6与定子磁轭1之间设置有限位柱7,动子磁轭6沿限位柱7的导向滑动。
[0050]
在一个实施例中,制动器还包括限位挡板8,限位挡板8设置在动子磁轭6远离定子磁轭1的一端。
[0051]
在一个实施例中,限位柱7中空,限位挡板8上设置有定位螺钉9,定位螺钉9穿设在限位柱7内,并与定子磁轭1固定连接。
[0052]
在一个实施例中,限位挡板8与动子磁轭6之间设置有摩擦片10。
[0053]
在一个实施例中,定子磁轭1与动子磁轭6之间还设置有弹簧13,弹簧13能够对动子磁轭6施加朝向限位挡板8的弹性作用,在定子磁轭1朝向动子磁轭6的端面上设置有弹簧槽,弹簧13设置在弹簧槽内,且一端抵接在弹簧槽底部,一端抵接在动子磁轭6上。
[0054]
上述的凸起3也可以为其它形状,例如沿间隔周向排布的多个弧形凸起3,多个弧形的凸起3可以沿周向均匀排布,只需要其位置位于前述的限定区域内,就可以改善磁场密度分布,降低制动器功率消耗,提高电机效率。
[0055]
根据本技术的实施例,电机包括制动器,该制动器为上述的制动器。
[0056]
上述的电机例如为伺服电机。
[0057]
在一个实施例中,电机包括制动器部分和电机部分,其中制动器部分和电机部分之间设置有端盖11,端盖11朝向定子磁轭1的一端设置有环形凹槽12,凸起3安装在环形凹槽12内。本实施例通过在端盖11上设置环形凹槽12来容纳凸起13,能够避免凸起13的设置增加制动器的总体轴向长度,因此能够使得本技术实施例的电机,在保证伺服电机长度和体积不变的情况下降低制动器使用功率,提高伺服电机运行效率,提高伺服电机功率密度。
[0058]
根据本技术的实施例,机器人包括制动器,该制动器为上述的制动器。
[0059]
本领域的技术人员容易理解的是,在不冲突的前提下,上述各有利方式可以自由地组合、叠加。
[0060]
以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。以上仅是本技术的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1