一种基于无人飞行器的带电高压线缆的除冰设备的制作方法
1.本发明涉及电力传输领域,尤其涉及一种基于无人飞行器的带电高压线缆的除冰设备。
背景技术:
2.在冬季,用于传输电力能源的高压线缆非常容易结冰,即避免很容易产生厚重的冰块,这样会对高压线缆产生额外的负担,造成电力能源传输的安全隐患;而目前在对高压线缆进行除冰作业时,很多都是需要人工进行,如人工驾驶特种车辆对高压线缆进行除冰,但是采用这样的方式存在很大的安全隐患,如触电,冰块坠落等,并且目前的除冰作业很难彻底的清除线缆表面上的冰块。
3.鉴于此,需要设计一种能够提高除冰作业安全性、除冰作业智能化自动化进行、除冰彻底的基于无人飞行器的带电高压线缆的除冰设备。
技术实现要素:
4.为了克服目前在对高压线缆进行除冰作业时存在安全性低下、自动化程度低、除冰不彻底的缺点,技术问题为:提供一种能够提高除冰作业安全性、除冰作业智能化自动化进行、除冰彻底的基于无人飞行器的带电高压线缆的除冰设备。
5.本发明的技术实施方案是:一种基于无人飞行器的带电高压线缆的除冰设备,包括有:支撑架,支撑架数量为两组;飞行装置,飞行装置设于支撑架两侧,飞行装置用于进行飞行工作;连接架,连接架设于两组支撑架一侧之间,且支撑架远离连接架一侧位置之间设有固定架,固定架另一侧设有中继架;承托装置,承托装置设于连接架处,承托装置用于承重支撑工作;刮冰装置,刮冰装置设于固定架处,刮冰装置用于对带电高压线缆进行表面刮冰工作。
6.进一步的,飞行装置包括有:落地架,落地架分别设于支撑架两侧,且支撑架近落地架一侧位置处均设有连接块;无人飞行组件,无人飞行组件分别设于连接块上,无人飞行组件为可变旋翼式无人机。
7.进一步的,承托装置包括有:第一电动滑轨,第一电动滑轨设于连接架一侧,第一电动滑轨移动件上设有第一陶瓷板;承托轮,承托轮设于第一陶瓷板之间。
8.进一步的,刮冰装置包括有:第二电动滑轨,第二电动滑轨设于连接架一侧,第二电动滑轨数量至少三组,第二电动滑轨移动件上均设有第二陶瓷板;刮冰轮,刮冰轮分别设于第二陶瓷板之间。
9.进一步的,还包括有破冰装置,破冰装置包括有:支撑杆,支撑杆分别设于第二电动滑轨的移动件上,支撑杆另一侧均设有弹性件,弹性件为板簧,弹性件另一侧均设有破冰锥架;驱动组件,驱动组件设于安装架处,驱动组件与破冰锥架配合,驱动组件用于使破冰锥架进行工作。
10.进一步的,驱动组件包括有:弧形滑轨,弧形滑轨设于安装架内壁处,弧形滑轨的
移动件上设有弧形板,弧形板近破冰锥架一侧位置处均布有触发球,触发球分别与相邻的破冰锥架配合;齿带,齿带设于弧形板内周,安装架近齿带一侧位置处设有摆动电机,摆动电机输出轴处设有齿轮,齿轮与齿带配合。
11.进一步的,还包括有融冰装置,融冰装置包括有:包围架,包围架设于中继架之间,包围架为u形,包围架两侧均设有保温层,包围架内周设有供气管;加热组件,加热组件设于包围架远离中继架一侧位置处,加热组件与供气管连接。
12.进一步的,加热组件包括有:换气箱,换气箱设于包围架远离中继架一侧位置处,换气箱处设有气泵;电热模组,电热模组设于换气箱位于气泵与供气管之间的位置处,电热模组的进气端与气泵的出气端连接,电热模组的出气端与供气管连接。
13.进一步的,还包括有控制箱,支撑架处设有控制箱,控制箱包括有蓄电池、dc-dc电源模块和控制模块mcu,dc-dc电源模块上通过线路连接有电源总开关,控制模块mcu和dc-dc电源模块之间通过电性连接,控制模块mcu上设有数字按键,控制模块mcu上连接有24c02电路、蜂鸣器电路和315m接收模块,主机遥控器上连接有就位开关、复位开关、破冰开关和加热开关,第一电动滑轨、第二电动滑轨、摆动电机、气泵和电热模组均与控制模块mcu通过外围电路连接。
14.本发明的有益效果为:1、本发明通过采用飞行装置进行飞行至带电高压线缆处的方式,能够使线缆表面的除冰工作安全性更高,且除冰效率能够的得到提高,避免人工从线缆下方对高压线缆进行除冰作业时带来的安全性隐患,且能够提高智能化程度。
15.2、本发明通过采用刮冰装置和破冰装置对线缆表面进行除冰作业的方式,能够使线缆除冰作业速度加快,能够解放人工,提高自动化程度。
16.3、本发明通过采用融冰装置对线缆表面残余冰块和水分进行烘干的方式,能够使线缆表面的冰块被去除干净,且未带有残余水分的线缆能够避免其短时间内再次结冰。
附图说明
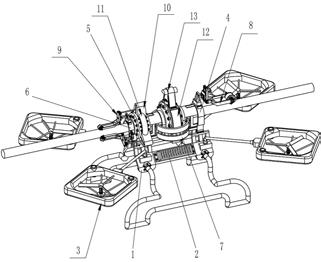
17.图1为本发明的第一种立体结构示意图。
18.图2为本发明的第二种立体结构示意图。
19.图3为本发明的第三种立体结构示意图。
20.图4为本发明的右视结构示意图。
21.图5为本发明的主视结构示意图。
22.图6为本发明的俯视结构示意图。
23.图7为本发明飞行装置部分的立体结构示意图。
24.图8为本发明中继架部分的立体结构示意图。
25.图9为本发明的第一种局部立体结构示意图。
26.图10为本发明的第二种局部立体结构示意图。
27.图11为本发明的第三种局部立体结构示意图。
28.图12为本发明承托装置部分的立体结构示意图。
29.图13为本发明安装架部分的第一种局部立体结构示意图。
30.图14为本发明安装架部分的第二种局部立体结构示意图。
31.图15为本发明安装架部分的第三种局部立体结构示意图。
32.图16为本发明安装架部分的第四种局部立体结构示意图。
33.图17为本发明安装架部分的第五种局部立体结构示意图。
34.图18为本发明驱动组件部分的第一种局部立体结构示意图。
35.图19为本发明驱动组件部分的第二种局部立体结构示意图。
36.图20为本发明破冰装置部分的局部立体结构示意图。
37.图21为本发明融冰装置部分的第一种局部立体结构示意图。
38.图22为本发明融冰装置部分的第二种局部立体结构示意图。
39.图23为本发明融冰装置部分的第三种局部立体结构示意图。
40.图24为本发明的电路原理图。
41.图25为本发明的电路框图。
42.附图中各零部件的标记如下:1、支撑架,2、控制箱,3、飞行装置,4、连接架,5、安装架,6、固定架,7、中继架,8、承托装置,9、刮冰装置,31、落地架,32、连接块,33、无人飞行组件,81、第一电动滑轨,82、第一陶瓷板,83、承托轮,91、第二电动滑轨,92、第二陶瓷板,93、刮冰轮,10、破冰装置,101、支撑杆,102、弹性件,103、破冰锥架,11、驱动组件,111、弧形滑轨,112、弧形板,113、触发球,114、齿带,115、摆动电机,116、齿轮,12、融冰装置,121、包围架,122、保温层,123、供气管,13、加热组件,131、换气箱,132、气泵,133、电热模组。
具体实施方式
43.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
44.实施例1如图1-23所示,一种基于无人飞行器的带电高压线缆的除冰设备,包括有支撑架1、飞行装置3、连接架4、安装架5、固定架6、中继架7、承托装置8和刮冰装置9,具体为:支撑架1数量为两组,支撑架1两侧设有飞行装置3,飞行装置3用于进行飞行,支撑架1右侧上方之间设有连接架4,连接架4为u形,支撑架1左侧上方之间设有安装架5,安装架5为u形,安装架5左侧设有固定架6,固定架6为u形,支撑架1之间设有中继架7,连接架4上侧设有承托装置8,承托装置8用于承重支撑工作,固定架6左侧设有刮冰装置9,刮冰装置9用于对带电高压线缆进行表面刮冰工作。
45.上述实施例在进行操作时,可以通过电源总开关启动该基于无人飞行器的带电高压线缆的除冰设备;可以对所需除冰作业的线缆直径通过控制箱2上的数字按键进行输入,以确定刮冰装置9的运动距离,使刮冰装置9能够与线缆表面进行接触;随后可以通过外界对飞行装置3进行启动并进行姿态控制,使该基于无人飞行器的带电高压线缆的除冰设备套在线缆之上,使线缆处于连接架4、固定架6和安装架5之间,并使线缆处于刮冰装置9之间,随后可以通过外界保持住飞行装置3的姿态,此时可以使用主机遥控器上的就位开关通过控制箱2控制刮冰装置9工作,使刮冰装置9通过控制箱2的程序控制和预先输入的线缆直径值进行工作,使刮冰装置9夹住线缆,而与此同时承托装置8也将与刮冰装置9同时工作,使刮冰装置9与承托装置8共同承托住该基于无人飞行器的带电高压线缆的除冰设备于线缆之上;此时可以控制飞行装置3向左侧飞行,从而使刮冰装置9在向左移动的过程中对线缆上的冰块进行刮除;在对该段线缆除冰完成后,可以通过主机遥控器上的复位开关控制
刮冰装置9复位,并控制飞行装置3脱离该段线缆,并飞行至下一段线缆,并如上述再次操作;不使用时,可以通过电源总开关关闭该基于无人飞行器的带电高压线缆的除冰设备。
46.飞行装置3包括有落地架31、连接块32和无人飞行组件33,具体为:支撑架1下侧均设有落地架31,支撑架1左右两侧均设有连接块32,连接块32上均设有无人飞行组件33,无人飞行组件33为可变旋翼式无人机。
47.上述实施例在进行操作时,可以通过外界控制无人飞行组件33的工作,并对其姿态进行控制。
48.承托装置8包括有第一电动滑轨81、第一陶瓷板82和承托轮83,具体为:连接架4右侧上方设有第一电动滑轨81,第一电动滑轨81的移动件上设有第一陶瓷板82,第一陶瓷板82右侧设有承托轮83。
49.上述实施例在进行操作时,可以通过主机遥控器上的就位开关控制第一电动滑轨81的工作,并通过预先输入的线缆直径值通过控制箱2的程序控制第一电动滑轨81的移动行程;第一陶瓷板82对传输电力过程中的高压线缆掘绝缘,避免高压顺坏该基于无人飞行器的带电高压线缆的除冰设备,除冰完成后,可以通过主机遥控器上的复位开关控制第一电动滑轨81停止工作。
50.刮冰装置9包括有第二电动滑轨91、第二陶瓷板92和刮冰轮93,具体为:固定架6左侧上方设有三组第二电动滑轨91,第二电动滑轨91的移动件上均设有第二陶瓷板92,第二陶瓷板92左侧均设有刮冰轮93。
51.上述实施例在进行操作时,可以通过主机遥控器上的就位开关和复位开关控制第二电动滑轨91的工作,并通过预先输入的线缆直径值通过控制箱2的程序控制第二电动滑轨91的移动行程;第二陶瓷板92对传输电力过程中的高压线缆掘绝缘,避免高压顺坏该基于无人飞行器的带电高压线缆的除冰设备;刮冰轮93将在移动的过程中刮除线缆上的冰块。
52.还包括有破冰装置10,破冰装置10包括有支撑杆101、弹性件102、破冰锥架103和驱动组件11,具体为:破冰装置10设于安装架5处,破冰装置10与第二电动滑轨91的移动件连接,破冰装置10用于对线缆上的坚冰进行破碎,第二电动滑轨91的移动件右侧均设有支撑杆101,支撑杆101右侧均设有弹性件102,弹性件102为板簧,弹性件102右侧均设有破冰锥架103,安装架5处设有驱动组件11,驱动组件11与破冰锥架103配合,驱动组件11用于使破冰锥架103进行工作。
53.上述实施例在进行操作时,可以通过主机遥控器上的破冰开关启动驱动组件11,驱动组件11将进行摇摆工作,驱动组件11每次摇摆工作都将带动破冰锥架103运行,使破冰锥架103通过弹性件102对线缆上的坚冰进行敲击破碎;而第二电动滑轨91的移动件移动时,破冰锥架103也将上下移动,而破冰锥架103也将保持与驱动组件11的配合。
54.驱动组件11包括有弧形滑轨111、弧形板112、触发球113、齿带114、摆动电机115和齿轮116,具体为:安装架5左侧内壁设有弧形滑轨111,弧形滑轨111的移动件上设有弧形板112,弧形板112右侧均布有触发球113,触发球113分别与相邻的破冰锥架103接触配合,弧形板112内周设有齿带114,安装架5左侧内壁设有摆动电机115,摆动电机115输出轴上设有齿轮
116,齿轮116与齿带114配合。
55.上述实施例在进行操作时,可以通过主机遥控器上的破冰开关启动摆动电机115,摆动电机115将带动齿轮116正转十五度和翻转十五度,从而带动弧形板112和触发球113旋转,从而使触发球113带动破冰锥架103运行;不使用时,也可以通过主机遥控器上的破冰开关关闭摆动电机115。
56.还包括有融冰装置12,融冰装置12包括有包围架121、保温层122、供气管123和加热组件13,具体为:中继架7之间设有融冰装置12,融冰装置12用于对线缆表面的残余冰块和水分进行烘干,中继架7之间设有包围架121,包围架121为u形,包围架121两侧均设有保温层122,包围架121内周设有供气管123,包围架121上侧设有加热组件13,加热组件13与供气管123连接。
57.上述实施例在进行操作时,可以通过主机遥控器上的加热开关启动加热组件13,加热组件13将对供气管123进行热源供给,使供气管123对线缆表面进行残余冰块和水分的处理。
58.加热组件13包括有换气箱131、气泵132和电热模组133,具体为:包围架121上侧设有换气箱131,换气箱131内设有气泵132,换气箱131中部设有电热模组133,电热模组133的进气端与气泵132的出气端连接,电热模组133的出气端与供气管123连接。
59.上述实施例在进行操作时,可以通过主机遥控器上的加热开关启动气泵132和电热模组133,从而使气泵132通过换气箱131进行吸气,并通过电热模组133将空气加热,最后从供气管123中吹向线缆表面;不使用时,也可以通过主机遥控器上的加热开关关闭气泵132和电热模组133。
60.实施例2如图24-25所示,还包括有控制箱2,支撑架1处设有控制箱2,控制箱2包括有蓄电池、dc-dc电源模块和控制模块mcu,dc-dc电源模块上通过线路连接有电源总开关,控制模块mcu和dc-dc电源模块之间通过电性连接,控制模块mcu上设有数字按键,控制模块mcu上连接有24c02电路、蜂鸣器电路和315m接收模块,主机遥控器上连接有就位开关、复位开关、破冰开关和加热开关,第一电动滑轨81、第二电动滑轨91、摆动电机115、气泵132和电热模组133均与控制模块mcu通过外围电路连接。
61.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1