一种机器人充电方法及系统与流程
1.本发明涉及充电领域,尤其涉及一种机器人充电方法及系统。
背景技术:
2.机器人是自动控制机器(robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等);随着人工智能的发展,机器人的发展越来越迅速,应用也越来越广泛,充电问题日益凸显。
3.通常机器人的充电机构为固定位置的充电桩以及固定充电停车位组合。但是在建设及使用过程机器人和充电桩一对一设置,一个充电桩只能应对一个机器人充电,往往造成充电桩和充电位的长时间占用,规模建设经济性较差,建设成本高。
技术实现要素:
4.为解决背景技术中存在的技术问题,本发明提出一种机器人充电方法及系统,实现了单个充电站点对多个机器人进行充电,有效地提高了充电效率。
5.本发明提出一种机器人充电方法,应用于机器人充电系统中的调度系统,所述机器人充电系统包括若干充电站、若干机器人和调度系统,所述充电站具有供电点z,所述机器人设有充电点a和供电点b,所述充电点a和所述供电点b导通;所述方法包括:
6.响应于目标机器人的充电请求,所述调度系统从所述充电站中确定目标机器人充电的目标充电站;
7.响应于所述目标机器人前往所述目标充电站,所述调度系统确认所述目标机器人充电点a接入所述目标充电站的充电位置,并发送充电位置的坐标至所述机器人;
8.其中,所述调度系统确认所述目标机器人充电点a接入所述目标充电站的充电位置,包括:
9.判断所述目标充电站是否存在充电中的机器人;
10.若否,则将所述目标充电站的供电点z作为充电位置;
11.若是,则将远离供电点z一端的充电中机器人的供电点b作为充电位置。
12.优选地,所述充电站设有控制供电点z供电的触发器,所述机器人内部设有控制充电点a和供电点b导通的连通器,所述发送充电位置的坐标至所述机器人之后还包括:
13.响应于所述目标机器人充电点a与充电位置连接成功;
14.当所述充电位置为目标充电站的供电点z时,所述调度系统控制闭合目标充电站的触发器,对所述目标机器人进行供电;
15.当所述充电位置为远离供电点z一端的充电中机器人的供电点b时,所述调度系统控制闭合所述远离供电点z一端的充电中机器人内部的连通器,使其充电点a与供电点b导通,对所述目标机器人进行供电。
16.优选地,所述对目标机器人进行供电之后还包括:
17.响应于所述目标机器人的充电结束请求,所述调度系统确定所述目标机器人的充
电点a与供电点b是否导通;
18.若否,所述调度系统控制目标机器人离开充电位置;
19.若是,所述调度系统控制目标机器人内部连通器断开,并控制所述目标机器人离开充电位置。
20.优选地,所述对所述目标机器人进行供电之后还包括:
21.响应于所述目标机器人的充电结束请求,所述调度系统确定所述目标机器人的充电点a与供电点b是否导通;
22.若目标机器人的充电点a与供电点b不导通,所述调度系统控制所述目标机器人移动第二预设距离,自转预设角度,离开充电位置;
23.若目标机器人充电点a与供电点b导通,所述调度系统确定与目标机器人供电点b导通的机器人队列;
24.所述调度系统控制机器人队列移动第一预设距离;再控制所述目标机器人移动第二预设距离,自转预设角度,离开充电位置;再控制所述机器人队列移动第三预设距离使原与所述目标机器人供电点b连接的机器人与目标充电位置连接;
25.所述机器人队列为与所述目标机器人供电点b连接的机器人和远离充电点z一端的机器人及它们之间的所有充电中的机器人组成的队列;所述目标充电位置为所述目标机器人充电时充电点a所连接的充电位置。
26.本发明还提出一种机器人充电系统,包括:若干充电站、若干机器人和调度系统,所述充电站具有供电点z,所述机器人设有充电点a和供电点b,所述充电点a和所述供电点b导通;所述调度系统包括:
27.通讯模块,用于接收机器人的充电请求,从所述充电站中确定该机器人充电的目标充电站;
28.调度模块,用于响应于所述机器人前往所述目标充电站,确认所述机器人充电点a接入所述目标充电站的充电位置,并发送充电位置的坐标至所述机器人;
29.其中,所述调度模块确认所述机器人充电点a接入所述目标充电站的充电位置,包括:
30.调度模块判断所述目标充电站是否存在充电中机器人;
31.若否,则将所述目标充电站的供电点z作为充电位置;
32.若是,则将远离充电点z一端的充电中机器人的供电点b作为充电位置。
33.优选地,所述机器人内部设有电量感知模块,用于检测机器人本体电量;
34.优选地,所述机器人内部设有通讯模块,用于发送充电请求或充电结束请求至调度系统;
35.优选地,所述机器人内部通讯模块,还用于接收充电位置的坐标并根据所述充电位置的坐标前往所述充电位置进行充电。
36.优选地,所述机器人内部设有连通器,所述机器人的充电点a通过连通器和供电点b导通,所述充电站设有触发器,所述供电点z通过触发器进行供电。
37.优选地,所述调度系统包括控制模块,用于控制机器人内部连通器的通断和充电站触发器的通断。
38.优选地,所述调度系统的通讯模块还用于接收机器人的充电结束请求;所述控制
系统还用于控制该机器人离开充电站。
39.本发明中,调度系统响应于目标机器人的充电请求,从充电站中确定目标机器人充电的目标充电站;响应于所述目标机器人前往所述目标充电站,确认所述目标机器人充电点a接入所述目标充电站的充电位置,并发送充电位置的坐标至所述机器人;其中,调度系统通过判断所述目标充电站是否存在充电中的机器人,确定充电位置。本发明调度系统通过根据目标充电站中是否存在充电中的机器人确定充电位置,实现机器人之间串联的充电形式,实现了单个充电站点对多个机器人进行充电,有效的节省了充电站的设置,提高了机器人充电部署空间的利用,也提高了机器人充电效率。本发明所提出的方法,应用于调度系统,实现了调度机器人充电以及充电结束后的撤离的自动化。
附图说明
40.图1为本发明实施例提出的一种机器人充电系统的结构示意图;
41.图2为本发明实施例提出的机器人充电组件的结构示意图;
42.图3为本发明实施例提出的一种机器人充电方法的流程示意图。
具体实施方式
43.如图1所示,图1为本发明实施例中机器人充电系统的结构示意图;
44.参照图1,本发明实施例提出的一种机器人充电系统,包括若干充电站1、若干机器人3和调度系统2;充电站设有供电点z102;所述机器人设有充电点a301,供电点b302,所述充电点a301和所述供电点b302导通;
45.如图1所示:本实施例中,机器人的充电点a301设于机器人前端;供电点b302设于机器人后端;
46.本实施例中,所述调度系统包括:
47.通讯模块201,用于接收机器人的充电请求,从所述充电站中确定该机器人充电的目标充电站;
48.调度模块202,用于响应于所述机器人前往所述目标充电站,确认所述机器人充电点a接入所述目标充电站的充电位置,并发送充电位置的坐标至所述机器人;
49.其中,所述调度模块202确认所述机器人充电点a接入所述目标充电站的充电位置,包括:
50.调度模块202判断所述目标充电站是否存在充电中机器人;
51.若否,则将所述目标充电站的供电点z作为充电位置;
52.若是,则将远离充电点z一端的充电中机器人的供电点b作为充电位置。
53.需要说明的是,本实施例中,机器人充电站放置在墙边,通过螺丝固定,充电站内部设有触发器101,其为可控触发器,充电站内部电压220ac通过触发器连接外部充电供电点z,当调度系统检测机器人已经接触输出供电点z时,触发器闭合,供电点z输出ac220v电压,当系统检测没有机器人接触z触点时,触发器断开,z触点没有电压输出。
54.本实施例中,机器人前端装有充电点a301,机器人后端装有供电点b302,充电点a通过内部连通器和供电点b导通,导通后的b触点可以向外供电,供电电压为ac220v。
55.如图2所示,所述机器人充电点a与供电点b之间充电组件具体包括有交流保险丝、
第一交流继电器、充电器、电池和第二交流继电器;需要说明的是,所述连通器为第二交流继电器,具体的,第一交流继电器接通后,充电点a接机器人上的充电器,充电器接电池进行充电,当第二交流继电器连通后,充电点a与供电点b导通,导通后的b触点可以向外供电,供电电压为ac220v。
56.本实施例中,所述机器人内部设有连通器,所述机器人的充电点a通过连通器和供电点b导通,所述充电站设有触发器,所述供电点z通过触发器进行供电。
57.本实施例中,所述机器人内部设有电量感知模块,用于检测机器人本体电量,所述机器人内部还包括通讯模块,当检测到机器人本体电量低于预设阈值时,发送充电请求至调度系统;机器人充电时,当检测到机器人本体电量达到预设阈值时即充满电,上报充电结束请求至调度系统。
58.本实施例中,所述机器人通讯模块用于接收充电位置的坐标并根据所述充电位置的坐标前往所述充电位置进行充电。
59.本实施例中,调度系统还包括控制模块203,用于控制机器人内部连通器的通断和充电站触发器的通断;具体的,所述机器人根据充电位置坐标行驶至充电位置,将充电点a与充电位置连接;连接成功后,机器人内通讯模块反馈连接信息至调度系统;响应于所述目标机器人充电点a与充电位置连接成功;当所述充电位置为目标充电站的供电点z时,所述调度系统控制闭合目标充电站的触发器,对所述目标机器人进行供电;当所述充电位置为远离供电点z一端的充电中机器人的供电点b时,所述调度系统控制闭合所述远离供电点z一端的充电中机器人内部的连通器,使其充电点a与供电点b导通,对所述目标机器人进行供电。
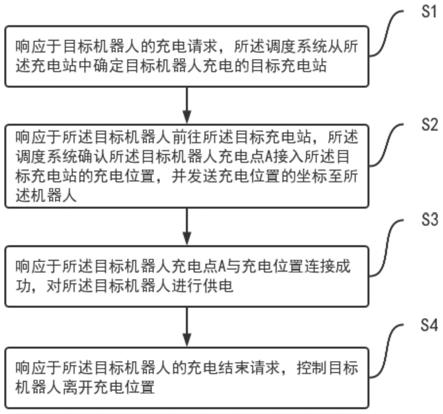
60.本发明第二实施例提出一种机器人充电的方法,应用于第一实施例所述的充电系统中的调度系统,如图3,所述方法具体包括:
61.s1:响应于目标机器人的充电请求,所述调度系统从所述充电站中确定目标机器人充电的目标充电站;
62.s2:响应于所述目标机器人前往所述目标充电站,所述调度系统确认所述目标机器人充电点a接入所述目标充电站的充电位置,并发送充电位置的坐标至所述目标机器人;
63.所述步骤s2中调度系统确认所述目标机器人充电点a接入所述目标充电站的充电位置具体包括:
64.判断所述目标充电站是否存在充电中的机器人;
65.若否,则将所述目标充电站的供电点z作为充电位置;
66.若是,则将远离供电点z一端的充电中机器人的供电点b作为充电位置。
67.s3:响应于所述目标机器人充电点a与充电位置连接成功,对所述目标机器人进行供电:
68.当所述充电位置为目标充电站的供电点z时,所述调度系统控制闭合目标充电站的触发器,对所述目标机器人进行供电;
69.当所述充电位置为远离供电点z一端的充电中机器人的供电点b时,所述调度系统控制闭合所述远离供电点z一端的充电中机器人内部的连通器,使其充电点a与供电点b导通,对所述目标机器人进行供电。
70.本实施例中,所述机器人根据充电点的位置坐标行驶至充电位置,将充电点a与充
电位置连接;连接成功后,机器人反馈连接信息至调度系统;调度系统接收到连接成功的反馈狗,当所述充电位置为充电站的触发器的供电点z时,调度系统控制闭合充电站的触发器,进行充电;当所述充电点为充电队列中末端机器人的后端供电点b时,调度系统控制闭合末端机器人内部的连通器,进行充电。
71.本实施例中,机器人前端有充电充电点a,机器人后端有充电供电点b,充电点a通过连通器和供电点b导通,导通后的供电点b可以向外供电,供电电压为ac220v,及当机器人内部连通器闭合时,则可以向后面连接的机器人供电,在自身充电的同时,也可以使得后面连接的机器人进行充电。
72.s4:响应于所述目标机器人的充电结束请求,控制目标机器人离开充电位置。
73.具体的:所述调度系统确定所述目标机器人的充电点a与供电点b是否导通;
74.若否,所述调度系统控制目标机器人离开充电位置;
75.若是,所述调度系统控制目标机器人内部连通器断开,并控制所述目标机器人离开充电位置。
76.本实施例中,调度系统控制机器人离开充电位置具体包括:
77.若目标机器人的充电点a与供电点b不导通,所述调度系统控制所述目标机器人移动第二预设距离,自转预设角度,离开充电位置;
78.若目标机器人充电点a与供电点b导通,所述调度系统确定与目标机器人供电点b导通的机器人队列;调度系统控制机器人队列移动第一预设距离;再控制所述目标机器人移动第二预设距离,自转预设角度,离开充电位置;再控制所述机器人队列移动第三预设距离使原与所述目标机器人供电点b连接的机器人与目标充电位置连接;
79.本实施例中,所述机器人队列为与所述目标机器人供电点b连接的机器人和远离充电点z一端的机器人及它们之间的所有充电中的机器人组成的队列;所述目标充电位置为所述目标机器人充电时充电点a所连接的充电位置。
80.具体的,本实施例中,所述第一预设距离大于第二预设距离;所述第三预设距离为第一预设距离加上离开机器人的本体占用充电队列的距离;例如,第一预设距离为50cm,第二预设距离为25cm,机器人本体长度为20cm,预设角度为90度时,当充满电的机器人是否在充电站队列的末端时,调度系统控制充满电的机器人向后移动25cm,自转90度,离开充电位置;当充满电的机器人不在充电队列的末端时,调度系统控制充满电的机器人后端连接的机器人队列同步向后移动50cm;再控制充满电的机器人向后25cm,自转90度,离开充电位置;再控制机器人队列同步向前移动70cm与目标充电位置连接,再次实现串联充电,未充满电的机器人继续充电。
81.本发明中,调度系统响应于目标机器人的充电请求,从充电站中确定目标机器人充电的目标充电站;响应于所述目标机器人前往所述目标充电站,确认所述目标机器人充电点a接入所述目标充电站的充电位置,并发送充电位置的坐标至所述机器人;其中,调度系统通过判断所述目标充电站是否存在充电中的机器人,确定充电位置。本发明调度系统通过根据目标充电站中是否存在充电中的机器人确定充电位置,实现机器人之间串联的充电形式,实现了单个充电站点对多个机器人进行充电,有效的节省了充电站的设置,提高了机器人充电部署空间的利用,也提高了机器人充电效率。本发明所提出的方法,应用于调度系统,实现了调度机器人充电以及充电结束后的撤离的自动化。
82.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1