横向磁通电机的制作方法
横向磁通电机
1.相关申请的交叉引用
2.本技术要求于2020年2月10日提交的美国临时申请no.62/972,609的“tooth assembly for a transverse flux electric machine employing a lamination stack having a tooth trench with a tooth spring geometry(采用具有齿槽和齿弹簧几何结构的层压件叠置件的横向磁通电机的齿组件)”的权益;并且要求于2020年2月10日提交的美国临时申请no.62/972,615的“multiphase transverse flux electric machine employing a single lamination geometry(采用单一层压件几何结构的多相横向磁通电机)”的权益;并且要求于2020年2月10日提交的美国临时申请no.62/972,622的“lamination rings with return gaps for coil return and transverse flux electric machine incorporating same(具有用于线圈返回件的返回间隙的层压件环和结合该层压件环的横向磁通电机)”的权益;并且要求于2020年2月10日提交的美国临时申请no.62/972,636的“transverse flux electric machine with potting dimples and method of producing same(具有灌封凹坑的横向磁通电机及其生产方法)”的权益;并且要求于2020年2月10日提交的美国临时申请no.62/972,629的“continuously tapered tooth and phase assemblies with constant tooth offset distances between the continuously tapered teeth(连续渐缩的齿和在连续渐缩的齿之间具有恒定的齿偏移距离的相组件)”的权益,这些申请的公开内容通过引用以其整体并入本文。
背景技术:
3.本公开总体上涉及电机。更具体地,本公开涉及横向磁通电机。
4.电动马达利用电来产生机械输出。一些电动马达产生旋转输出。在交流(ac)感应马达中,定子被通电以便以电磁的方式驱动转子围绕马达轴线旋转。定子包括层压体和绕组。转子包括永磁体,该永磁体由通过定子的电流所感应的电磁场作用以促使转子的旋转。这种电动马达包括线圈,该线圈相对于旋转轴线轴向地延伸,并且轴向地延伸超出转子的端部以缠绕并形成线圈绕组的端部。
5.每个线圈代表用于作用在磁体上的电位极。围绕旋转轴线周向地排列的离散线圈相对于彼此异相。所产生的电位转矩与极的数量成比例。这种马达中的极的数量受限于在马达内围绕旋转轴线沿周向装配离散线圈的能力。线圈绕组可以被做得更小,并且定子的直径可以被做得更大,以便容纳更多的线圈来支持更多的极,但是这会增加马达的尺寸、重量和成本,并且仍然有限制。当转子以相对高的速率旋转时,还可以增加功率,从而每单位时间可以经历更多的线圈-磁体通过。这需要马达以相对高的速度操作,但是一些应用可能期望低速度的输出。
技术实现要素:
6.根据本公开的一个方面,一种电动马达包括定子和转子。该定子包括至少一个相组件。该相组件包括具有多个磁通突出部的磁通环,所述多个磁通突出部相对于转子的旋
转轴线径向地延伸。
7.根据本公开的一方面,一种被构造成产生旋转输出的电动马达包括:转子和定子,所述转子被配置成在马达轴线上旋转;所述定子被配置成被通电,以产生促使所述转子旋转的磁通量。所述定子包括磁通环,所述磁通环包括线箍和多个磁通突出部,所述多个磁通突出部从所述线箍径向地延伸并且围绕所述马达轴线周向地布置。所述多个磁通突出部中的第一磁通突出部包括第一保持件和第一齿,所述第一齿至少部分地设置在所述第一保持件内并且被所述第一保持件固持在所述磁通环上。
8.根据本公开的附加或替代性方面,一种用于电动马达的磁通环,该磁通环包括:环本体,所述环本体围绕一轴线设置;以及多个磁通突出部,所述多个磁通突出部相对于所述环本体径向地延伸。所述多个磁通突出部中的每个磁通突出部包括:保持件,所述保持件具有相对于所述环本体径向地延伸的保持件本体、从所述保持件本体延伸的第一指状部,和从所述保持件本体延伸的第二指状部;和齿,所述齿至少部分地设置在所述保持件的固持腔内。所述第一指状部和所述第二指状部在所述齿上施加径向力,以将所述齿夹持在所述固持腔内。
9.根据本公开的另一附加或替代性方面,一种用于在横向磁通电动马达中使用的磁通环,包括:环本体,所述环本体围绕一轴线设置;以及多个磁通突出部,所述多个磁通突出部相对于所述环本体径向地延伸。所述多个磁通突出部中的每个磁通突出部包括:保持件,所述保持件具有相对于所述环本体径向地延伸的保持件本体,所述保持件限定固持腔;和齿,所述齿至少部分地设置在所述保持件的所述固持腔内。所述固持腔包括在所述腔的与所述保持件本体相反的端处的径向开口。所述固持腔包括u形基部部分,所述u形基部部分具有第一腿部和第二腿部,所述第一腿部在第一周向方向上倾斜,并且所述第二腿部在与所述第一周向方向相反的第二周向方向上倾斜。
10.根据本公开的又一附加或替代性方面,一种制造用于在横向磁通电动马达中使用的磁通环的方法,包括:由层压片的叠置件形成磁通环,所述磁通环具有线箍和多个保持件,所述线箍限定马达轴线,所述多个保持件相对于所述线箍径向地延伸;将粉末金属齿与所述多个保持件中的第一保持件的接收室对齐;使所述粉末金属齿相对于所述磁通环轴向地移动,以使得所述粉末金属齿行进穿过所述接收室的轴向开口并进入所述固持腔中;以及通过所述第一保持件的第一指状部和所述第二保持件的第二指状部在所述粉末金属齿上施加朝向所述线箍的径向力,并且将所述粉末金属齿坐接在所述固持腔内来将所述粉末金属齿固定在所述接收室内。
11.根据本公开的又一附加或替代性方面,一种用于形成横向磁通电动马达的相组件的磁通环,包括:环本体,所述环本体围绕马达轴线设置;多个主干,所述多个主干从所述环本体径向地延伸;多个分支,所述多个分支由所述多个主干支撑并径向地远离所述本体,以使得在所述环本体和所述多个分支之间限定多个返回件开口;以及多个磁通突出部,所述多个磁通突出部从所述多个分支延伸并且远离所述环本体径向地延伸,其中,在所述多个磁通突出部中的相邻的磁通突出部之间沿周向形成间隔间隙。所述磁通环包括第一侧向部分和第二侧向部分,所述第一侧向部分位于与所述马达轴线正交的翻转轴线的第一侧,所述第二侧向部分位于所述马达轴线的第二侧。所述第一侧向侧的返回件开口与所述第二侧向侧的返回件开口关于所述翻转轴线对齐。位于所述第一侧向侧的所述磁通突出部与位于
所述第二侧向侧的所述磁通突出部关于所述翻转轴线错位。
12.根据本公开的又一附加或替代性方面,一种用于横向磁通电动马达的相组件,包括:第一磁通环,所述第一磁通环围绕马达轴线设置,并且具有径向地延伸的多个第一磁通突出部;第二磁通环,所述第二磁通环围绕所述马达轴线设置,并且具有径向地延伸的多个第二磁通突出部;线圈,所述线圈轴向地设置在所述第一磁通环和所述第二磁通环之间;以及多个轴向返回件,所述多个轴向返回件在所述第一磁通环和所述第二磁通环之间轴向地延伸,并且延伸到所述第一磁通环的多个第一返回件开口和所述第二磁通环的多个第二返回件开口中。所述第一磁通环具有第一构型,所述第一构型限定所述多个第一返回件开口和所述多个第一磁通突出部中的每个的径向位置和周向位置。所述第二磁通环具有第二构型,所述第二构型限定所述多个第二返回件开口和所述多个第二磁通突出部中的每个的径向位置和周向位置。所述第一构型与所述第二构型相同。
13.根据本公开的又一附加或替代性方面,一种用于横向磁通电动马达的定子,包括多个磁通环,所述多个磁通环沿着马达轴线设置并且围绕所述马达轴线排列。所述多个磁通环中的每个磁通环包括:环本体,所述环本体围绕马达轴线设置;多个主干,所述多个主干从所述环本体径向地延伸;多个分支,所述多个分支由所述多个主干支撑并径向地远离所述环本体,以使得在所述环本体和所述多个分支之间形成多个返回件开口;多个磁通突出部,所述多个磁通突出部从所述多个分支并且远离所述环本体径向地延伸。所述多个磁通环中的每个磁通环具有共同的基础构型,所述共同的基础构型限定所述多个返回件开口和所述多个磁通突出部中的每一者的径向位置和周向位置。所述多个磁通环中的第一磁通环设置在相对于所述马达轴线的第一位置中。所述多个磁通环中的第二磁通环设置在相对于所述马达轴线的第二位置中,所述第二位置相对于所述第一位置绕所述马达轴线旋转。
14.根据本公开的又一附加或替代性方面,一种用于横向磁通电动马达的定子的相组件的磁通环,包括:环本体,所述环本体围绕马达轴线设置;多个主干,所述多个主干从所述环本体径向地延伸;多个分支,所述多个分支由所述多个主干支撑并径向地远离所述环本体,以使得在所述环本体和所述多个分支之间形成多个返回件开口;多个磁通突出部,所述多个磁通突出部从所述多个分支延伸并且远离所述环本体径向地延伸;以及多个间隙,每个间隙周向地设置在所述多个磁通突出部中的相邻的磁通突出部之间。所述多个间隙中的第一间隙设置在所述多个分支中的第一分支和所述多个分支中的第二分支之间,以在所述第一分支和所述第二分支之间限定导线返回件开口。
15.根据本公开的又一附加或替代性方面,一种用于横向磁通电动马达的定子的相组件的磁通环,包括:环本体,所述环本体围绕马达轴线设置;多个主干,所述多个主干从所述环本体径向地延伸;多个分支,所述多个分支由所述多个主干支撑并径向地远离所述环本体,以使得在所述环本体和所述多个分支之间形成多个返回件开口;多个磁通突出部,所述多个磁通突出部从所述多个分支延伸并且远离所述环本体径向地延伸;第一组多个间隙,所述第一组多个间隙中的每个间隙周向地设置在所述多个磁通突出部中的相邻的磁通突出部之间;以及第二组多个间隙,第二组多个间隙中的每个间隙周向地设置在所述多个分支中的相邻的分支之间。所述第二组多个间隙关于所述马达轴线不对称地设置。
16.根据本公开的又一附加或替代性方面,一种用于横向磁通电动马达的相组件,包括:第一磁通环,所述第一磁通环围绕马达轴线设置;第二磁通环,所述第二磁通环与所述
第一磁通环轴向地间隔开;线圈,所述线圈轴向地设置在所述第一磁通环和所述第二磁通环之间;以及多个轴向返回件,所述多个轴向返回件在所述第一磁通环和所述第二磁通环之间延伸,其中,所述多个轴向返回件中的每个轴向返回件延伸到所述第一磁通环的第一返回件开口和所述第二磁通环的第二返回件开口中。所述多个轴向返回件关于所述马达轴线不对称地设置。所述线圈的第一线圈连接器从所述线圈延伸并且径向地穿过穿过返回间隙,所述返回间隙形成在所述多个轴向返回件中的第一轴向返回件和所述多个轴向返回件中的第二轴向返回件之间。所述线圈的第二线圈连接器从所述线圈延伸并且径向地穿过所述返回间隙。
17.根据本公开的又一附加或替代性方面,一种电动马达,包括:转子,所述转子被配置成围绕马达轴线旋转;定子,所述定子包括沿着马达轴线并且围绕该马达轴线排列的多个相组件;以及空气间隙,所述空气间隙径向地设置在所述转子和所述定子之间。所述空气间隙在所述转子和所述定子之间的的尺寸变化。
18.根据本公开的又一附加或替代性方面,一种用于将灌封物施加到电动马达的定子的灌封组件,所述定子被配置成以空气间隙径向地设置在所述定子和转子之间的方式与转子相对,以形成所述电动马达,所述灌封组件包括:可适形构件,所述可适形构件被配置成与所述定子的暴露于所述空气间隙的表面对接;以及相对构件,所述相对构件设置在所述定子的与所述可适形构件相反的径向侧,以使得通过所述可适形构件和所述相对构件径向地架住所述定子。所述可适形构件突出到形成在所述定子的磁通量收集部件之间的间隙中,以在所述定子的暴露于所述空气间隙的所述表面中限定凹坑。
19.根据本公开的又一附加或替代性方面,一种电动马达,包括:转子,所述转子被配置成围绕马达轴线旋转;定子,所述定子包括沿着马达轴线并且围绕该马达轴线排列的多个相组件;以及空气间隙,所述空气间隙径向地设置在所述转子和所述定子之间。在所述定子的暴露于所述空气间隙的表面中形成有多个凹坑。
20.根据本公开的又一附加或替代性方面,一种电动马达,包括转子和定子,所述转子围绕马达轴线旋转。所述定子包括至少一个相。每个相包括:第一磁通环,所述第一磁通环包括多个第一返回件槽、多个第一磁通突出部、第一面向侧和第一远离侧;第二磁通环,所述第二磁通环包括多个第二返回件槽、多个第二磁通突出部、第二面向侧和第二远离侧,其中所述第一磁通环和所述第二磁通环被定位成使得所述多个第一磁通突出部相对于所述多个第二磁通突出部周向地偏移;多个返回件,所述多个返回件围绕所述马达轴线排列,所述多个返回件中的每个返回件分别延伸到所述多个第一返回件槽中的一个第一返回件槽和所述多个第二返回件槽中的一个第二返回件槽中,以使得每个返回件桥接在所述第一磁通环与所述第二磁通环之间;和线圈,所述线圈直接地设置在所述第一磁通环和所述第二磁通环之间,以使得所述第一磁通环的所述第一面向侧面向所述线圈,并且所述第二磁通环的所述第二面向侧面向所述线圈。所述第一磁通环上的所述多个第一返回件槽和所述多个第一磁通突出部相对于所述马达轴线的位置是所述第二磁通环上的所述多个第二返回件槽和所述多个第二磁通突出部的位置的翻转镜像。
21.根据本公开的又一附加或替代性方面,一种用于组装电动马达的第一相的方法,包括:将多个磁通环中的第一磁通环定位成与马达轴线同轴,其中所述多个磁通环中的每个磁通环具有多个返回件槽、多个磁通突出部、面向侧和远离侧;将线圈的第一侧定位成与
所述第一磁通环相邻并且与所述马达轴线同轴,以使得所述第一磁通环的面向侧面向所述线圈的所述第一侧;将所述多个磁通环中的第二磁通环定位成与所述马达轴线同轴并且与所述线圈相邻,以使得所述第二磁通环的面向侧面向所述线圈的第二侧,并且所述线圈直接位于所述第一磁通环和所述第二磁通环之间,并且还使得所述第一磁通环的多个磁通突出部相对于所述第二磁通环的多个磁通突出部周向地偏移;以及将多个轴向返回件插入到所述第一磁通环的所述多个返回件槽和所述第二磁通环的所述多个返回件槽中,以使得每个返回件桥接在所述第一磁通环和所述第二磁通环之间,并且所述多个轴向返回件围绕所述电动马达轴线排列。
22.根据本公开的又一附加或替代性方面,一种电动马达,包括:转子,所述转子围绕马达轴线旋转;和定子,所述定子包括至少一个相。每个相包括:第一磁通环,所述第一磁通环包括第一组多个主干和由所述第一组多个主干支撑的第一组多个磁通突出部,其中所述第一组多个主干围绕所述马达轴线不均匀地、周向地排列;第二磁通环,所述第二磁通环包括第二组多个主干和由所述第二组多个主干支撑的第二组多个磁通突出部;和线圈,所述线圈与所述马达轴线同轴并且直接地位于所述第一磁通环和所述第二磁通环之间,所述线圈被配置成被通电以相对于所述第二组多个磁通突出部对所述第一组多个磁通突出部磁通进行电磁极化。
23.根据本公开的又一附加或替代性方面,一种电动马达包括:转子,所述转子围绕马达轴线旋转;和定子,所述定子包括至少一个相。每个相包括:第一磁通环,所述第一磁通环包括第一组多个分支组和由所述第一组多个分支组支撑的第一组多个磁通突出部,其中,所述第一组多个分支组在相应的分支组中围绕所述马达轴线不均匀地、周向地排列;第二磁通环,所述第二磁通环包括第二组多个分支组和由所述第二组多个分支组支撑的第二组多个磁通突出部;和线圈,所述线圈与所述马达轴线同轴并且直接地位于所述第一磁通环和所述第二磁通环之间,所述线圈被配置成被通电以相对于所述第二组多个磁通突出部对所述多个第一磁通突出部磁通进行电磁极化。
24.根据本公开的又一附加或替代性方面,一种电动马达,包括:转子,所述转子围绕马达轴线旋转;和定子,所述定子包括至少一个相。每个相包括:第一磁通环,所述第一磁通环包括围绕所述马达轴线周向地排列的第一组多个磁通突出部,所述第一组多个磁通突出部中的每个磁通突出部至少部分地由第一组多个层压件中的每个层压件形成;第二磁通环,所述第二磁通环包括围绕所述马达轴线周向地排列的第二组多个磁通突出部,所述第二组多个磁通突出部中的每个磁通突出部至少部分地由第二组多个层压件中的每个层压件形成;多个轴向返回件,每个轴向返回件由第一组多个层压件叠置件中的相应的叠置件形成,所述第一组多个层压件叠置件围绕所述马达轴线不均匀地排列,每个轴向返回件桥接在所述第一磁通环和所述第二磁通环之间;和线圈,所述线圈与所述马达轴线同轴并且直接地位于所述第一磁通环和所述第二磁通环之间,所述线圈被配置成被通电以相对于所述第二组多个磁通突出部对所述第一组多个磁通突出部磁通进行电磁极化。
25.根据本公开的又一附加或替代性方面,一种电动马达,包括:转子,所述转子围绕马达轴线旋转;以及定子,所述定子包括至少一个相,空气间隙位于所述转子和所述定子之间,每个相包括:第一组多个磁通突出部,所述第一组多个磁通突出部围绕所述马达轴线周向地排列;第二组多个磁通突出部,所述第二组多个磁通突出部围绕所述马达轴线周向地
排列;线圈,所述线圈与所述马达轴线同轴,并且所述线圈轴向地位于所述第一组多个磁通突出部和所述第二组多个磁通突出部之间;和灌封物,所述灌封物将所述第一组多个磁通突出部、所述第二多个磁通突出部和所述线圈嵌入在灌封物的连续基质中,所述灌封物形成面向所述空气间隙的第一组多个凹坑。
附图说明
26.图1是横向磁通电动马达的示意框图。
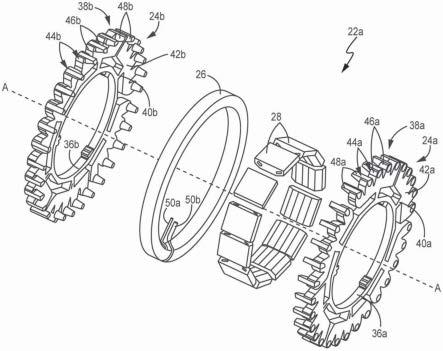
27.图2a是孤立地示出电动马达的零部件的等距视图。
28.图2b是电动马达的定子的等距视图。
29.图3a是电动马达的相组件的分解视图。
30.图3b是沿图8a中的线8-8截取的放大剖视图,示出了流动通过相组件的电磁通。
31.图3c是沿图8a中的线8-8截取的放大剖视图,示出了与图3b所示的相反流动的电磁通。
32.图3d是示出了转子部分的部件的磁极性的放大端视图。
33.图4a是磁通环在第一轴向方向上的端视图。
34.图4b是磁通环在第二轴向方向上的端视图。
35.图4c是磁通环在第一轴向方向上的端视图,还示出了轴向返回件。
36.图5a是相组件的等距视图。
37.图5b是图5a中所示的移除了磁通环的相组件的等距视图。
38.图5c是图5a所示的相组件的一部分的放大等距视图。
39.图5d是沿图5a中的线d-d截取的放大剖视图。
40.图6a是定子的立面端视图。
41.图6b是沿图6a中的线b-b截取的剖视图。
42.图6c是定子的俯视图。
43.图7a是齿的等距视图。
44.图7b是图7a的齿的立面侧视图。
45.图7c是图7a的齿的第一立面端视图。
46.图7d是图7a的齿的俯视图。
47.图7e是图7a的齿的第二立面端视图。
48.图8是磁通环的一部分的放大等距视图,示出了没有齿的磁通突出部的保持件。
49.图9a是沿图5b中的线9-9截取的磁通突出部的放大剖视图。
50.图9b是图9a所示的磁通突出部的分解剖视图。
51.图10是相组件的侧视图。
52.图11a是处于第一状态的具有灌封套筒的定子的第一等距视图。
53.图11b是处于第二状态的具有灌封套筒的定子的第二等距视图。
54.图11c是处于第二状态的具有灌封套筒的定子的第三等距视图,并且示出了插入件。
55.图12a是示出具有凹坑的定子的一部分的放大端视图。
56.图12b是示出了凹坑的定子的局部侧视图。
57.图13是示出了凹坑的定子的立体端视图。
58.图14a是用于内转子马达的磁通环的一部分的端视图,并且示出了插入件。
59.图14b是类似于图14a的端视图,示出了在灌封物已经固化并且插入件被去除之后的磁通环。
60.图15是内转子马达的定子内的插入件的示意图。
具体实施方式
61.本发明涉及一种横向磁通电机。该电机包括能够围绕马达轴线旋转的转子和被配置成驱动该转子的旋转的定子。横向磁通电动马达的定子包括相组件,诸如一个、两个、三个或更多个相组件,该相组件由磁通环和轴向地设置在相对的磁通环之间的线圈形成。磁通环包括磁通突出部,该磁通突出部相对于马达轴线并且朝向转子径向地延伸。磁通突出部可以包括在线圈上轴向地延伸的齿。通过轴向返回件(axial return)结合相组件的磁通环,该轴向返回件接触每个磁通环,并且设置在线圈的与转子相反的径向侧。转子包括永磁体和穿插在永磁体之间的集中器。应当理解,虽然通常将电机讨论为是电动马达,但是本文所讨论的原理也适用于其他电机,例如发电机。
62.图1是电机10的框图。电机10包括转子12、定子14和马达控制器16。转子12包括转子本体18和永磁体阵列20。定子14包括相组件22a、22b、22c(在本文中统称为“一个相组件22”或“多个相组件22”)。相组件22a包括磁通环24a、24b;线圈26和轴向返回件28。相组件22b包括磁通环24c、24d;线圈26和轴向返回件28。相组件22c包括磁通环24e、24f;线圈26和轴向返回件28。磁通环24a-24f在本文中统称为“一个磁通环24”或“多个磁通环24”。
63.转子12与定子14径向地间隔开,以使得在转子12与定子14之间形成空气间隙30。电机10沿着马达轴线a-a延伸,并且转子12被配置成围绕马达轴线a-a旋转。在所示示例中,转子12环绕定子14,以使得电机10是外转子。然而应当理解,电机10的一些示例包括定子14围绕转子12延伸,以使得电机10是内转子。永磁体阵列20安装到转子本体18的径向内侧。从定子14穿过空气间隙30设置永磁体阵列20,以使得该永磁体阵列20与定子14径向地间隔开。永磁体阵列20包括围绕马达轴线a-a环形地设置的多个永磁体。
64.定子14由沿着马达轴线a-a排列的相组件22形成。每个相组件22包括成对的磁通环24,该成对的磁通环24设置在该相组件22的线圈26的相反的轴向侧上。磁通环24a、24b成对以形成相组件22a,并且设置在该相组件22的线圈26的相反的轴向侧上。磁通环24c、24d成对以形成相组件22b,并且设置在该相组件22b的线圈26的相反的轴向侧上。磁通环24e、24f成对以形成相组件22b,并且设置在该相组件22c的线圈26的相反的轴向侧上。
65.在一些示例中,每个磁通环24的部分可以在线圈26上轴向地延伸。如此,每个磁通环24的部分可以径向地设置在线圈26与永磁体阵列20之间,如下面更详细讨论的。磁通环24由层压件形成,并且可以包括粉末金属部件。磁通环24可以被配置成具有沿径向定向的层压件纹理。
66.可以由易于受到来自由线圈26所产生的场的极化的影响的材料来形成层压件。此类材料典型地是铁磁性的。铁磁性材料可以是诸如铁或铁合金之类的材料,例如钢。更具体地,层压件可以由硅钢以及其他选项来形成。铁磁性材料可以是掺杂或以其他方式嵌有铁磁性元素的陶瓷。
67.对于每个相组件22,轴向返回件28设置在线圈26的与永磁体阵列20相反的径向侧上。轴向返回件28在每个相组件22中的磁通环24中的成对的磁通环之间延伸并且连接该成对的磁通环。轴向返回件28电连接该成对的磁通环24。轴向返回件28可以由具有沿轴向定向的层压件纹理(例如,平行于马达轴线a-a)的叠置的层压件来形成。
68.每个线圈26是围绕马达轴线a-a的导线(典型地,铜)的绕组。因此,每个线圈26可以是围绕马达轴线的20个、30个、40个、50个、100个,或更少或更多的导线环的连续绕组。在一些实施例中,带替代导线缠绕。
69.控制器16以能够操作的方式电连接或通信地连接到电机10,以控制该电机10的操作,从而控制该电机10的旋转输出。控制器16可以具有用于控制电机10的操作的任何期望的配置,并且可以包括控制电路和存储器。控制器16被配置成存储可执行的代码、实施功能和/或处理指令。控制器16被配置成执行本文所讨论的功能中的任何功能,包括控制本文引用的任何部件的操作。控制器16可以具有用于控制电机10的操作、采集数据、处理数据等的任何合适的配置。控制器16可以包括硬件、固件和/或存储的软件。控制器16可以具有适合于根据本文所描述的技术来操作的任何类型。虽然控制器16被图示为单个单元,但应当理解,控制器16可以完整地或部分地安装在一个或多个板上。在一些示例中,控制器16可以被实施为多个分立的电路子组件。
70.在操作期间,交流(ac)信号行进通过每个线圈26。由于通过线圈26的ac信号的电流反向,所以ac信号快速地构建和瓦解磁场。每个相组件22的磁通集中材料(例如,磁通环24和轴向返回件28)围绕线圈26的至少三侧包裹。一般地,磁通沿着层压件的方向和纹理流动,这是因为磁通一般将遵循最高磁导率的路径,并且磁通从一层层压件跳跃到另一层层压件存在很大的阻抗。磁通环24的层压件纹理可以相对于马达轴线a-a沿径向定向,而轴向返回件28的层压件纹理可以相对于马达轴线a-a沿轴向定向。如此,磁通在围绕线圈26的u形路径中并且朝向转子12轴向地流动通过轴向返回件28并且径向地流动通过磁通环24。
71.路由通过线圈26的ac信号与用于驱动转子12的旋转的永磁体阵列20的旋转位置在时间上同步,以产生通过磁通环24的磁场。通过每个相组件22a、22b、22c中的线圈26传输的相应的ac信号(例如,正弦的或梯形的)相对于彼此异相。以这种方式,与使正弦ac信号同步相比,形成永磁体阵列20的磁体更频繁地具有作用在该磁体上的磁通峰,从而提供沿着马达轴线a-a作用在转子12上的更加平滑的转矩轮廓(profile)。所讨论的电机10的实施例具有与三个相组件22a、22b、22c相对应的三个相和该三个相组件中的相应的线圈26。如此,通过线圈26以120度的电偏移来传输三个正弦ac信号。应当理解,虽然电机10一般作为电动马达来讨论,但是该电机10可以是发电机。
72.图2a是孤立地示出电机10的零部件的等距视图。图2b是定子14的等距视图。将一起讨论图2a和图2b。电机10包括转子12和定子14。示出了转子12的永磁体阵列20。永磁体阵列20包括磁体32和集中器34。定子14包括相组件22a、22b、22c。相组件22a包括磁通环24a、24b;线圈26和轴向返回件28。相组件22b包括磁通环24c、24d;线圈26和轴向返回件28。相组件22c包括磁通环24e、24f;线圈26和轴向返回件28。每个磁通环24a-24f包括环本体36、主干40、分支42和磁通突出部44。每个磁通突出部44包括保持件46和齿48。
73.电机10包括被转子12环绕的定子14。定子14被配置成驱动该转子12围绕马达轴线a-a旋转。转子12和定子14两者关于马达轴线a-a同轴地设置。空气间隙30径向地设置在转
子12与定子14之间,并且类似地具有与马达轴线a-a同轴的圆筒形轮廓。在所示示例中,转子12环绕定子14,以使得转子12围绕马达轴线a-a围绕定子14周向地旋转。电机10因此可以被认为是外旋转马达。然而,应当理解,一些示例包括径向地位于定子14的内侧的转子12。在这样的示例中,电机10可以被认为是内旋转马达。无论转子12是围绕定子14或者是在定子14内,电机10的操作原理以及转子12和定子14的结构可以是相似的。虽然下面的讨论涉及转子12围绕定子14旋转的实施例,但是应当理解,这些教导同样地适用于转子12在定子14内旋转的实施例。
74.在图示的实施例中,转子12包括永磁体阵列20。永磁体阵列20包括多个磁体32。所述多个磁体32围绕马达轴线a-a环形地排列。更具体地,所述多个磁体32的管状阵列与马达轴线a-a同轴。所述多个磁体32围绕定子14和马达轴线a-a周向地排列。
75.每个磁体32具有长轴线la,如图2a所指示的。长轴线la与马达轴线a-a平行地轴向地定向。每个磁体32还具有短轴线sa,如图2a所指示的。短轴线sa与长轴线正交并且与以马达轴线a-a为中心的圆相切地定向。每个磁体32具有沿周向定向的永久的极——北极n(图3d中所示)和南极s(图3d中所示)。更具体地,每个磁体32在短轴线sa的一端部处具有北极,并且在短轴线sa的相反端部处具有南极。北极和南极中的每个极沿着长轴线la的长度延伸,以使得北极和南极被沿着长轴线la的轴向界面划分开。每个磁体32的北极和南极不是以磁体通常在长轴线的相对端部处被划分成北极和南极的方式轴向地定向的。每个磁体32在相组件22a-22c之间是连续的,以使得每个磁体32平行于马达轴线a-a笔直地延伸,并且使得每个磁体32被定位成与每个相组件22磁性地相互作用。
76.在图示的实施例中,所述多个磁体32围绕定子14环形地排列,但如先前所提及的,对于电机10的内转子的示例,所述多个磁体32可以在定子14内径向地环形地排列。定子14和转子12磁性地对接,以驱动该转子12围绕定子14和马达轴线a-a旋转。定子14可以不包括任何永磁体,而是包括电磁体,当线圈26被通电时该电磁铁产生磁场,如本文进一步描述的。同样地,转子12可以仅包括永磁体,并且不包括任何电磁体。
77.转子12还包括多个集中器34。所述多个集中器34与所述多个磁体32交错,以使得磁体32和集中器34交替,并且每个磁体32被集中器34架住并且每个集中器34被磁体32架住。以这种方式,磁体32中没有一个磁体彼此物理地接触,但仍然被所述多个集中器34物理地固定。所述多个集中器34轴向地定向,以使得每个集中器34的长轴线平行于马达轴线a-a。每个集中器34的长轴线平行于每个磁体32的长轴线。每个集中器34可以由叠置的层压件形成。每个层压件的长轴线与马达轴线a-a平行地定向。如此,叠置的层压件的纹理是轴向定向的。
78.定子14包括相组件22a-22c的阵列。沿着马达轴线a-a排列相组件22a-22c。每个相组件22由一对成对的磁通环24形成。相组件22a由成对的磁通环24a、24b形成。相组件22b由成对的磁通环24c、24d形成。相组件22c由成对的磁通环24e、24f形成。线圈26被轴向地夹在每个相组件22的成对的磁通环24之间。所述多个线圈26沿着马达轴线a-a彼此不重叠。在沿着马达轴线a-a设置的每个线圈26之间存在沿着该马达轴线a-a的轴向间隙。相组件22a-22c沿着马达轴线a-a彼此不重叠。每个相组件22a-22c的磁通环24彼此不重叠或彼此不接触。例如,相组件22a的磁通环24a、24b沿着马达轴线a-a与磁通环24c、24d或磁通环24e、24f不重叠。与不同的相组件22的磁通环24不同,每个相组件22内的磁通环24(例如,相组件22a
的磁通环24a、24b)确实沿着马达轴线a-a轴向地重叠。具体地,形成每个相组件22的所述成对的磁通环24的齿48沿着马达轴线a-a轴向地重叠。
79.相组件22a、22b、22c中的每个相组件在结构上和功能上可以是相同的,仅有的不同之处是通过线圈26传输的信号相对于彼此异相。在一些示例中,每个磁通环24可以具有共同的基部构型,如下面更详细讨论的。例如,相组件22a的磁通环24a可以具有与相组件22a的磁通环24b相同的操作几何形状。磁通环24中的成对的磁通环组装在一起,以使得磁通环24中的第一个磁通环(例如,磁通环24a)具有在第一轴向方向ad1上突出的齿48,并且磁通环24中的第二个磁通环(例如,磁通环24b)具有在与第一轴向方向ad1相反的第二轴向方向ad2上延伸的齿48。第一磁通环24的齿48延伸到第二磁通环24的齿48之间的周向间隙中。第二磁通环24的齿48延伸到第二磁通环24的齿48之间的周向间隙中。
80.每个磁通环24a-24f包括分别由该磁通环24的磁通突出部44形成的环形磁通突出部阵列38a-38f。磁通突出部阵列38a-38f可以统称为“一个磁通突出部阵列38“或”多个磁通突出部阵列38”。所述多个磁通环24a-24f沿着马达轴线a-a排列。每个磁通环24a-24f与马达轴线a-a同轴。形成每个磁通环24的层压件还形成该磁通环24的磁通突出部44的部分。例如,保持件46可以由层压体形成。该实施例中的磁通突出部44还包括由齿48形成的粉末金属末端。然而应当理解,在各种不同的其他示例中,层压件可以完全形成磁通突出部44。
81.环形磁通突出部阵列38a-38f与马达轴线a-a同轴。每个磁通突出部阵列38由其磁通环24的磁通突出部44形成。每个磁通突出部44朝向转子12突出。例如,每个磁通突出部44可以相对于(正交于)马达轴线a-a朝向转子12径向地延伸。在该实施例中,每个磁通突出部44是朝向转子12变窄的结构,以便将所集中的磁通会聚到转子12的有限部分。在一些实施例中,磁通突出部44可以不朝向转子12变窄,但是仍然可以朝向转子12集中磁通。在所示示例中,因为转子12从定子14沿径向向外定位,因此磁通突出部44从马达轴线a-a向外突出。然而,在替代性的内转子实施例中,磁通突出部44朝向这样的转子12并且朝向马达轴线a-a向内突出。定子14的磁通突出部44被排列成具有管状轮廓。更具体地,磁通突出部44围绕马达轴线a-a环形地排列,并且沿着该马达轴线a-a轴向地排列。以这种方式,定子14包括多个圆形磁通突出部阵列38a-38f。
82.图2a至图2b示出了六个圆形磁通突出部阵列38a-38f,所述六个圆形磁通突出部阵列38a-38f沿着马达轴线a-a排列。所述多个圆形磁通突出部阵列38a-38f沿着马达轴线a-a排列。每个圆形磁通突出部阵列38与马达轴线a-a同轴。
83.圆形磁通突出部阵列38a-38f可以分别被形成为所述多个磁通环24a-24f的部分。每个磁通环24支撑该磁通环24的相应的圆形磁通突出部阵列38的所有的磁通突出部44。每个磁通环24可以是连续的层压件,或者由围绕马达轴线a-a排列的多个层压件形成。在该示例中,每个磁通环24a-24f包括环本体36、相对于环本体36径向地延伸的主干(trunk)40、和由主干40支撑的分支(branch)42。磁通突出部44从分支42延伸。无论是否由各自支撑圆形磁通突出部阵列38的多个磁通突出部但不是所有磁通突出部44的离散的层压件组装,或是由支撑圆形磁通突出部阵列38的所有磁通突出部44的连续的层压件形成,该圆形磁通突出部阵列38由磁通环24支撑,其允许磁通在相组件22的周向相邻的磁通突出部44之间流动。
84.在所示示例中,每个磁通突出部阵列38从其磁通环24的环本体36径向地延伸。每个环本体36与马达轴线a-a同轴。在所示示例中,主干40从环本体36径向地延伸。因为转子
12在所示示例中是外转子,因此每个主干40从环本体36径向地向外延伸。每个分支42由相关联的主干40支撑。在所示示例中,每个分支42从主干40中的一个相关联的主干朝向转子突出。每个分支42相对于主干40周向地延伸。在所示示例中,每个分支42沿第一周向方向cd1(在图2a的视图中为顺时针)和第二周向方向cd2(在图2a的视图中为逆时针)延伸。每个分支支撑磁通突出部44中的多个磁通突出部。磁通突出部44相对于分支42并且朝向转子12延伸。
85.然而应当理解,在一些示例中,磁通环24a-24f不包括环本体36和/或主干40,在这种情况下,分支42直接连接其他结构和/或由其他结构支撑,例如通过环氧树脂连接。在一些示例中,组装多个层压件以形成每个圆形磁通突出部阵列38a-38f,例如组装在一起的多个弧形部分。
86.在所示示例中,每个磁通突出部44的末端带有粉末金属齿48,由于粉末金属部件不像层压体那样缺乏定向的纹理,这在一些实施例中可能是理想的。然而应当理解,各种不同的实施例不限于此,并且每个磁通突出部44可以不包括粉末金属部件。每个磁通突出部44可以由层压件部分地或完全地形成。例如,每个磁通突出部44可以通过形成磁通环24的其他部分(并且在一些示例中,形成环本体36)的层压体来形成。
87.如图所示,单个磁通环24的磁通突出部44的多个周向相邻的部分由单个层压件形成。每个磁通突出部44可以与该磁通环24的分支42、主干40和/或环本体36连续。以这种方式,磁通突出部44、分支42、主干40和/或环本体36可以由单个层压件或多个层压件来形成。在所示的实施例中,层压件作为连续件形成磁通环24。磁通突出部44、分支42、主干40和/或环本体36可以具有相对于马达轴线a-a径向地(例如,正交)延伸的层压件纹理。在一些示例中,这种层压件纹理可以是仅径向定向的。
88.每个相组件22包括由该相组件22的成对的磁通环24的磁通突出部阵列38形成的一对圆形磁通突出部阵列38。例如,磁通突出部阵列38a、38b形成相组件22a的所述成对的磁通突出部阵列。如下面更详细讨论的,每个相组件22a-22c的磁通突出部阵列38a-38f中的成对的磁通突出部阵列分别由轴向返回件28连接。成对的磁通突出部阵列38的每个集合由所述成对的磁通环24的磁通突出部44形成(例如,用于相组件22a的所述成对的磁通突出部阵列38a、38b由磁通环24a的磁通突出部44和磁通环24b的磁通突出部44形成)。
89.每个相组件22的磁通环24a-24f中的成对的磁通环分别由轴向返回件28连接。每个轴向返回件28是具有轴向(即,平行于马达轴线a-a)的纹理定向的层压件的叠置件。在一些示例中,层压件相对于轴线a-a沿周向叠置。在一些示例中,轴向返回件28的层压件纹理可以仅是轴向的。轴向返回件28在形成相组件22的每对磁通环24之间传导电磁通量。同样地,轴向返回件28在相组件22的每对圆形磁通突出部阵列38之间传导电磁通量。同样地,轴向返回件28在成对的磁通环24的每个集合中的轴向相邻的分支42之间传导电磁通量。例如,轴向返回件28在用于相组件22a的磁通环24a和磁通环24b的轴向相邻的分支42之间传导电磁通量。如本文进一步解释的,磁通环24a-24f中的所述成对的磁通环的磁通突出部44和圆形磁通突出部阵列38a-38f中的所述成对的圆形磁通突出部阵列形成通过定子14的多个磁通回路,该定子14磁性地作用在转子12的磁体32上以使该转子12相对于定子14旋转。
90.线圈26轴向地设置在磁通环24中的成对的磁通环之间。每个线圈26是围绕马达轴线a-a的导线(典型地是铜的)的绕组。每个线圈26可以是围绕马达轴线的20个、30个、40个、
50个、100个,或更少或更多个环的连续绕组。这些环一起形成线圈26的线箍(hoop)。在一些实施例中,带可以替代导线缠绕。在所示示例中,每个线圈26具有代表每个线圈26的电路的端部的两个端接线圈连接器50a、50b。线圈26的线圈连接器50a、50b可以由形成线圈26的绕组的导线形成,并且被配置成用于使ac信号通过线圈26行进,这些导线可以与控制器16(图1)电连接。对于每个相组件22,线圈连接器50a、50b在轴向返回件28中的周向相邻的轴向返回件之间以及在该相组件22的所述成对的磁通环24的轴向间隔开的环本体36之间延伸。
91.由于磁通突出部44的齿48轴向地突出,因此每个线圈26与相关联的相组件22的磁通突出部44径向地重叠。然而应当理解,在一些示例中,磁通突出部44不轴向突出,并且替代地是仅径向地(朝向或远离马达轴线a-a)突出。每个线圈26轴向地直接位于其相组件22的所述成对的磁通环24之间。每个相组件22的每个线圈26完全位于该相组件22的所述对磁通环24之间。相组件22a的线圈26轴向地设置在磁通环24a、24b之间;相组件22b的线圈26轴向地设置在磁通环24c、24d之间;以及相组件22c的线圈26轴向地设置在磁通环24e、24f之间。
92.在所示示例中,每个磁通突出部44由保持件46和齿48形成,该保持件由层压体形成,该齿48由粉末金属形成。保持件46将齿48固持在磁通环24上。如下文更详细讨论的,齿48可以压配合到保持件46,并且保持件46可以将齿48夹持到磁通环24以形成磁通突出部44。齿48从保持件46并且相对于磁通环24的层压体部分轴向地突出。齿48从其磁通环24轴向地突出到形成该相组件22的所述对磁通环24的其他磁通环24。每个齿48的一部分径向地设置在相关联的线圈26与转子12的永磁体阵列20之间。
93.图3a是相组件22a的分解视图。图3b和图3c展示了如何通过磁通成对的磁通突出部44a、44b形成磁通回路。图3d示出了与转子12的集中器34和磁体32相互作用的相组件22a的磁通成对的磁通突出部44a、44b的详细视图。将一起讨论图3a至图3d。相组件22a包括磁通环24a、24b;线圈26;和轴向返回件28。磁通环24a包括环本体36a、主干40a、分支42a和磁通突出部44a。磁通环24b包括环本体36b、主干40b、分支42b和磁通突出部44b。磁通突出部44a、44b分别包括保持件46a、46b和齿48a、48b。
94.磁通环24a沿着马达轴线a-a在第一轴向方向ad1上定向,以使得齿48a在第一轴向方向ad1上轴向地突出。磁通环24b与磁通环24a相反。磁通环24b沿着马达轴线a-a在第二轴向方向ad2上定向,以使得齿48b在第二轴向方向ad2上轴向地突出。线圈26直接位于相组件22a的所述成对的磁通环24a、24b之间。线圈26轴向地设置在磁通环24a、24b之间。甚至更具体地,线圈26直接位于所述成对的磁通环24a、24b的相对的分支42a、42b之间。甚至更具体地,线圈26直接位于所述成对的磁通突出部阵列38a、38b的所述成对的磁通突出部44a、44b的部分之间(例如,直接位于磁通环24a的磁通突出部44a与磁通环24b的磁通突出部44a之间)。线圈26与轴向返回件28径向地重叠。在该特定示例中,由于每个磁通突出部44a、44b分别具有轴向地延伸的齿48a、48b,因此线圈26在径向上被夹在轴向返回件28与磁通突出部44a、44b之间。
95.轴向返回件28在所述成对的磁通环24a、24b之间延伸,并且电连接该成对的磁通环24a、24b。轴向返回件28延伸到每个磁通环24a、24b中的开口中。轴向返回件28可以直接接触分支42a、42b的与磁通突出部44a、44b相反的侧。轴向返回件28被配置成在磁通环24a、24b之间传导电磁通量。同样地,轴向返回件28在相组件22a的圆形磁通突出部阵列38a、38b
之间传导电磁通量。同样地,轴向返回件28在成对的磁通环24a、24b的轴向相邻的分支42a、42b之间传导电磁通量。
96.轴向返回件28延伸到在磁通环24a中径向地限定在分支42a与环本体36a之间的开口中。该开口周向地限定在主干40a之间。轴向返回件28进一步延伸到磁通环24b中的径向地限定在分支42b与环本体36b之间的开口中的成对的开口中。该开口周向地限定在主干40b之间。
97.磁通成对的磁通突出部44是指相组件22的相对的圆形磁通突出部阵列38的磁通突出部44中的相应的最接近的对(例如,磁通突出部阵列38a、38b的磁通突出部44是磁通成对的,磁通突出部阵列38c、38d(图2b)的磁通突出部44是磁通成对的,磁通突出部阵列38e、38f(图2b)的磁通突出部44是磁通成对的)。虽然磁通突出部44a、44b的集合在图3b和图3c中被突出显示为磁通成对的,但是这些是示例,并且所有的磁通突出部44可以类似地在圆形磁通突出部阵列38a、38b上磁通成对。每个磁通突出部44a是与其对应的磁通成对的磁通突出部44b相似的磁通回路的一部分。磁通成对的磁通突出部44a、44b与同一圆形磁通突出部阵列38的相邻的磁通突出部44大致轴向地成对,而不是周向地成对,这是因为成对的磁通突出部阵列38中的第一个磁通突出部阵列(例如,磁通突出部阵列38a和磁通突出部阵列38b中的第一个磁通突出部阵列)的所有磁通突出部44在任何给定时间将具有相同的极性,而同一相组件22的相对的圆形磁通突出部阵列38(例如,磁通突出部阵列38a和磁通突出部阵列38b中的另一个磁通突出部阵列)的所有磁通突出部44在任何给定时间将具有相反的极性。更具体地,每个磁通突出部44与线圈26的另一侧上的圆形磁通突出部阵列38的最接近的磁通突出部44磁通成对。如图3b和图3c所示,通过磁通成对的磁通突出部44a、44b形成磁通回路,以使得磁通突出部44a、44b分别被极化为北极和南极。相组件22的所有磁通突出部44被同时极化。
98.由线圈26产生磁通。具体地,ac信号行进通过线圈26,由于通过线圈26的ac信号的电流反向,所以该线圈26快速地构建和瓦解磁场。如图所示,磁通环24a、24b和轴向返回件28的磁通集中材料围绕线圈26的至少三侧包裹。在所示示例中,磁通成对的磁通突出部44a、44b;磁通环24a、24b的磁通集中材料;以及轴向返回件28围绕线圈26完全包裹。
99.在图3b和图3c中示出了磁通集中材料的层压件纹理。一般地,磁通沿着层压件的方向与纹理流动,这是因为磁通一般将遵循最高磁导率的路径,并且从一层层压件跳跃到另一层层压件存在很大的阻抗。分支42a、42b(包括除粉末金属齿48a、48b之外的磁通突出部44a、44b)的层压件纹理是径向定向的,而轴向返回件28的层压件纹理是轴向定向的。磁通环24a、24b的层压片由此可以与轴向返回件28的层压片正交地设置。
100.除了由粉末金属形成的齿48之外,磁通环24a、24b由叠置的层压片形成。磁通环24a可以由叠置的层压片形成,其中每个层状体覆盖整个磁通环24a。例如,叠置的层压片可以形成完整的线箍36a、每个主干40a、每个分支42a和每个保持件46a。如此,在磁通环24a的一个径向侧上的保持件46a可以由与设置在磁通环24a的相反径向侧上的保持件46a相同的层状体形成。磁通环24b可以类似于磁通环24a由轴向地叠置的并且径向地延伸的连续的层压片形成。如此,相组件22a可以包括径向地延伸的层压片的两个连续的叠置件(形成磁通环24a、24b),并且可以包括轴向地延伸的层压片的多个连续的叠置件(形成轴向返回件28)。
101.在所示示例中,形成磁通环24a、24b的层压片轴向地叠置并且具有径向纹理。磁通环24a、24b的叠置的层压片可以在与马达轴线a-a正交的平面上定向。形成每个磁通环24a、24b的层压件对于由层压体形成的磁通环24a、24b的整个部分可以是连续的。例如,磁通环24a可以通过从线箍36a到主干40a到分支42a和到保持件46a的连续层压体形成。形成磁通环24的层压体叠置件可以包括至少十层薄片。
102.轴向返回件28的层压片可以与以马达轴线a-a为中心的圆相切地叠置,并且具有轴向纹理。轴向返回件28的每个层压片可以接触直接相邻的分支42a、42b的每个层压片。在一些示例中,轴向返回件28可以直接接触磁通环24的每个层压片。在一些示例中,每个轴向返回件28直接接触相组件22a的每个层压片,以使得每个轴向返回件28直接接触磁通环24a的每个层压片,并且直接接触磁通环24b的每个层压片。形成轴向返回件28的层压件叠置件可以包括至少十层薄片。
103.磁通以围绕线圈26的u形并且朝向转子12轴向地流动通过轴向返回件28并且径向地流动通过分支42a、42b和磁通突出部44a、44b(图1a和图2a)。图3b和图3c表示ac信号的反向(信号在图3b中处于第一状态并且在图3c中处于第二状态)以及如何切换磁通成对的磁通突出部44a、44b的极。
104.磁通突出部44a不与磁通突出部44b轴向地对齐;而是磁通成对的磁通突出部44a、44b的每个磁通突出部44a、44b沿周向偏移。如此,磁通回路在成对的磁通突出部44a、44b之间行进至少有限的周向距离。因此,包括多个磁通成对的磁通突出部44a、44b的累积磁通回路可以以螺旋图案沿周向流动通过磁通突出部44a、44b和轴向返回件28。通过线圈26的ac信号快速地改变电流方向,并且由此快速地改变磁通成对的磁通突出部44a、44b的南北极性。
105.在图示的实例中,磁通突出部44a、44b与集中器122对齐。集中器122的层压体不具有固有极化,但是由于集中器34在磁体32的极之间的固定位置,该集中器34呈现与磁体32的相邻极相同的有效永久极化,如所指示的。磁体32被布置成使得对于磁体32中的相邻磁体,相同的极在周向上朝向彼此定向。单个集中器34由此在两个北极或两个南极之间交错并且呈现这些极的极化。集中器34在每个磁体32的相反侧呈现交替的北极和南极极化。如所指示的,每个磁体32沿着该磁体的短轴线sa(图2a)被永久地极化为北极和南极。磁体32和集中器34的交错布置产生相反极化的集中器34和磁体32的极的交替区域。
106.集中器34将磁通量从磁体32朝向定子14路由。磁通回路是完整的、横跨定子14与转子12之间的空气间隙30。来自转子12(特别是磁体32)的磁通和来自线圈26(通过磁通突出部44)的磁通在空气间隙30中相互作用,并且所产生的磁通剪切驱动该转子12的旋转。本电机10的磁通具有横向于马达轴线a-a的定向。这与传统的ac马达和dc无刷马达的径向磁通取向不同。
107.由于永磁体阵列20的位置变化(例如,磁体32和集中器34围绕轴线a-a的周向位置变化)和转子12的旋转、以及由于通过线圈26的ac信号的变化而引起的磁通突出部44a、44b的极化变化,因此由定子14产生并且作用在转子12上的磁通不断地变化。如此,通过线圈26路由的ac信号与集中器34接近和离开磁通突出部44a、44b在时间上同步,以产生通过磁通突出部44a、44b的磁场,从而同时地推和拉转子12的磁体32以提供使转子12旋转的力。更具体地,在对齐的接近和离开时,n-n和s-s界面排斥,而n-s界面吸引。
108.继续参考图2a至图3d,通过每个相组件22a、相组件22b(图2b)和相组件22c(图2b)的线圈26传输的相应的ac信号(例如,正弦或梯形)相对于彼此异相。以这种方式,与使正弦ac信号同步相比,磁体32(沿着磁体的长轴线la(图2b)的长度)更频繁地具有作用在该磁体上的磁通峰。异相信号提供了沿着转子12的旋转轴线作用在该转子12上的平滑转矩轮廓。图1至图2b所示的电机10的实施例具有与三个相组件22a、22b、22c相对应的三个相和相组件中的线圈26,其中通过线圈26以120度的电偏移来传输三个正弦ac信号。如果存在两个相组件22和两个线圈26,则两个正弦ac信号将是180度电偏移的,或者对于四个相组件22和四个线圈26的集合,则是90度电偏移。
109.由于磁体32是细长的并且与多个相组件22并且由此与多个线圈26径向地重叠,因此每个磁体32被多个线圈26电磁作用。更具体地,在所示的三个相的实施例中,每个磁体32可以被三个线圈26同时地沿着磁体32的长度电磁作用。取决于具体的电机10(图1和图2a)的相的数量,每个磁体32可以被更多或更少的线圈26作用。如此,多个不同的线圈26电磁作用于每个磁体32。此外,每个磁体32可以仅被三个线圈26(或在两相马达实施例中仅被两个线圈26,或者在四相马达实施例中仅被四个线圈26,等)电磁作用。这与传统的ac感应马达不同,在传统的ac感应马达中每个磁体都与围绕转子的旋转轴线的传统周向线圈阵列的许多个线圈中的所有线圈相互作用。每个磁体32可以被电机10的每个线圈26同时地作用,这与传统的ac感应马达不同,在传统的ac感应马达中每个磁体被各个线圈以逐步的方式作用。
110.传统的ac感应马达使用围绕转子的旋转轴线周向地排列的多个离散线圈。每个线圈代表用于作用在磁体上的电位极。在传统的ac感应马达中围绕旋转轴线周向地排列的离散线圈相对于彼此异相。这种马达中的极的数量受限于在马达内围绕旋转轴线周向地装配离散线圈的能力。线圈绕组可以被制造得更小,并且定子的直径可以被制造得更大,以便接收更多的线圈来支持更多的极,但这会增加马达的尺寸、重量和成本,并且仍然有其局限性。当转子以相对高的速率旋转时,还可能增加功率,从而每单位时间可以经历更多的线圈-磁体通过。但这将需要马达以相对高的速度操作,取决于应用这可能是不期望的。
111.根据本公开的马达10不同于传统的ac马达和dc无刷马达。电机10包含相对少的线圈26,在所讨论的示例中仅有三个线圈。与传统的ac马达和dc无刷马达不同,线圈26由完全围绕转子12的旋转轴线延伸的环形成,如图3a所示。所述多个环一起形成线圈26的线箍。转子12的旋转轴线延伸穿过每个环(例如,每个环的中心)。每个线圈26是环形的,并且每个线圈26的环是同样的环形的,并且线圈26和环的圆形平面轮廓与马达轴线a-a正交。每个线圈26的导线形成单个线箍,该单个线箍具有彼此重叠并接触的多个环,以形成单个线箍组件。
112.线圈26不包括马达轴线a-a不延伸穿过的用于产生使转子12旋转的磁通的任何环。取代在传统的ac感应马达中为每个极添加新的线圈,环绕单个线圈26的分支42和轴向返回件28将磁通引导到所述多个磁通突出部44,磁通横跨成对的分支42a、42b成对以从单个线圈26创建多个极。在所示示例中,磁通环24a、24b各自分别包括三十个磁通突出部44a、44b。如此,对于每个相组件22,一个线圈26支持三十个极,然而可以创建更少和更多的极,这取决于圆形磁通突出部阵列38的磁通突出部44的数量,。如此,激活一个线圈26会激活多个极,而在一些传统的ac马达和dc无刷马达中,激活一个线圈会激活一个极。电机10包括多个线圈26,所述多个线圈作为多个相组件22的一部分沿着并围绕转子12的旋转轴线排列。
提供所述多个线圈26的所述多个相组件22使极的数量加倍,这可以同时地作用于永磁体阵列20并由此驱动转子12的旋转。
113.图4a是磁通环24的第一端视图。图4b是从与图4a所示的磁通环24相反的一侧获取的磁通环24的第二端视图。图4c是磁通环24的第一端视图,其也示出了轴向返回件28。将一起讨论图4a至图4c。磁通环24包括环本体36、主干40、分支42、磁通突出部44、间隔间隙52和返回件开口54a、54b(在本文中统称为“一个返回件开口54”或“多个返回件开口54”)、定位器64a-64c(在本文中统称为“一个定位器64”或“多个定位器64”)和周向间隙66a、66b(在本文中统称为“一个周向间隙66”或“多个周向间隙66”)。每个分支42包括返回件对接表面58。每个磁通突出部44包括保持件46和齿48。本公开参考了分隔距离,除非另有规定,该分隔距离可以是两个结构之间的线性距离、两个结构之间的(如以围绕马达轴线的弧测量的)周向距离、或两个结构之间的(如以相对于马达轴线的径向角测量的)角距离。
114.围绕马达轴线a-a环形地设置环本体36。主干40从环本体36径向地延伸。在所示示例中,因为磁通环24用于外转子马达(例如,电机10(图1和图2a)),因此主干40径向地向外延伸。然而应当理解,在其他示例中,主干40可以朝向轴线a-a径向地向内延伸。每个分支42连接到相关联的主干40。在所示示例中,每个分支42相对于相关联的主干40在每个周向方向cd1和cd2上延伸。分支42关于轴线a-a不对称地设置。磁通突出部44相对于每个分支42径向地延伸且轴向地延伸。在所示示例中,每个分支42支撑五个单独的磁通突出部44,但应当理解,每个分支42可以支撑多于五个或少于五个的磁通突出部44。每个分支42和相关联的磁通突出部44可以被认为形成相对于环本体36径向地延伸的磁通单元。在所示示例中,磁通环24包括六个磁通单元。磁通单元关于轴线a-a不对称地设置。
115.每个磁通突出部44由保持件46和齿48形成,该保持件46从分支42延伸,该齿48由保持件46支撑并且从保持件46延伸。保持件46可以由形成分支42的层压体形成。保持件46从分支42径向地延伸,并且被构造成支撑从该保持件46轴向地延伸的相关联的齿48。保持件46可以在磁通环24的两个轴向端部之间延伸。间隔间隙52周向地设置在磁通突出部44中的相邻的磁通突出部之间。每个磁通突出部44的宽度在朝向空气间隙30(图1和图2a)的径向方向上变窄。磁通突出部44关于轴线a-a不对称地设置。
116.周向线cl1形成以轴线a-a为中心的圆。周向线cl1设置在磁通突出部44中的相邻的磁通突出部之间的每个间隔间隙52的谷处。周向线cl1设置在分支42与磁通突出部44之间的接合部位处。分支42可以由单个层压件形成,而磁通突出部44可以由层压体(例如,保持件46)和粉末金属(例如,齿48)形成。磁通突出部44的层压体部分可以与分支42的层压体一体地形成。
117.返回件开口54a、54b径向地限定在分支42与环本体36之间。返回件开口54a、54b形成围绕马达轴线a-a周向地设置的轴向开口的环。分支42的返回件对接表面58部分地限定每个返回件开口54a、54b。分支42的返回件对接表面58可以与以马达轴线a-a为中心的圆相切地延伸。每个分支42的每个返回件对接表面58被设置成与以马达轴线a-a为中心的同一圆相切。如此,从马达轴线a-a延伸的径向线可以正交于平面的返回件对接表面58。在所示示例中,每个分支42部分地限定返回件开口54a,并且部分地限定返回件开口54b。如此,每个分支42包括一对返回件对接表面58。返回件开口54a、54b被构造成接收轴向返回件28。轴向返回件28直接地接触返回件对接表面58,以促进该返回件对接表面之间的磁通传递并且
形成磁通环路。
118.也可以被称为返回件槽的返回件开口54a、54b被周向地限定在主干40中的相邻的主干之间。在所示示例中,每个主干40限定返回件开口54a的一端部和返回件开口54b的一端部。主干40关于马达轴线a-a不对称地设置,以使得返回件开口54a的构型与返回件开口54b的构型不同。相邻的主干40之间的分隔距离变化以导致可变尺寸的返回件开口54a、54b。
119.返回件开口54a、54b围绕轴线a-a周向地交替地设置。如此,每个返回件开口54a周向地设置在两个返回件开口54b之间,并且每个返回件开口54b周向地设置在两个返回件开口54a之间。返回件开口54a、54b一起限定围绕马达轴线a-a的环形环,轴向返回件28设置在该环形环内。返回件开口54a、54b关于马达轴线a-a不对称地设置。在所示示例中,返回件开口54a具有与返回件开口54b不同的构型。返回件开口54a比返回件开口54b围绕马达轴线a-a延伸得更远。如此,返回件开口54a具有比返回件开口54b更大的周向宽度。返回件开口54的周向宽度是沿着以轴线a-a为中心的圆的周向所取的长度。可以在周向地夹住返回件开口54的主干40之间取得每个返回件开口54的周向宽度。
120.返回件开口54a围绕马达轴线a-a相对于彼此不对称地设置,以使得返回件开口54a围绕马达轴线a-a不均匀地间隔开。返回件开口54b类似地关于马达轴线a-a相对于彼此不对称,以使得返回件开口54b围绕马达轴线a-a不均匀地间隔开。返回件开口54a、54b中的每个被构造成支撑一对轴向返回件28。主干40限定每个返回件开口54a、54b的周向端部。
121.每个返回件开口54a具有两个接收部分56a、56b,所述两个接收部分各自由限定该返回件开口54a的分支42中的不同分支部分地限定。更具体地,每个接收部分56a、56b由分支42的返回件对接表面58部分地限定。每个接收部分56a、56b被构造成接收轴向返回件28。在分支42中的限定返回件开口54a的相邻的分支的返回件对接表面58之间形成角度α。如此,接收部分56a、56b相对于彼此是横向的。角度α是钝角。
122.每个返回件开口54b具有两个接收部分56c、56d,所述两个接收部分各自由限定返回件开口54b的分支42中的不同分支部分地限定。更具体地,每个接收部分56a、56b由分支42的返回件对接表面58部分地限定。每个接收部分56c、56d被构造成接收轴向返回件28。在分支42中的限定返回件开口54b的相邻的分支的返回件对接表面58之间形成角度β。如此,接收部分56c、56d相对于彼此是横向的。角度β是钝角。角度β可以与角度α相同。
123.每个轴向返回件28可以具有与其他轴向返回件28共同的构型。返回件对接表面58具有朝向马达轴线a-a定向的平面,并且被构造成与轴向返回件28对接。每个返回件对接表面58被设置成与从轴线a-a延伸的径向线正交。轴向返回件28直接地接触返回件对接表面58以形成磁通环路。每个返回件对接表面58可以具有相同的构型。例如,每个返回件对接表面58可以在该返回件对接表面58的分支42的主干40与该返回件对接表面58的围绕轴线a-a周向地与主干40相反的端部之间具有相同的宽度。如此,每个接收部分56a-56d可以具有相同的宽度。
124.周向间隙66a、66b设置在磁通单元中的相邻的磁通单元之间。周向间隙66设置在每个分支42的相反的周向端部上。周向间隙66围绕马达轴线a-a交替地排列。在所示示例中,每个分支42在该分支42的第一周向端部处部分地限定周向间隙66a,并且在该分支42的相反的第二周向端部处部分地限定周向间隙66b。分支42可以具有不同的构型来定位周向
间隙66a、66b;返回件开口54a、54b;以及用于将磁通环24组装成相组件22的磁通突出部44,如下面更详细讨论的。在所示示例中,分支42以两种构型形成,所述两种构型归在一起以形成齿段对。分支42的第一构型具有分支端部60a、60b,并且分支的第二构型具有分支端部60c、60d。每个齿段对周向地架在周向间隙66a之间,并且包括在成对的分支42之间的周向间隙66b。齿段对可以关于轴线a-a旋转对称。如此,齿段对可以呈现出关于轴线a-a的三重旋转对称性。
125.分支端部60a和分支端部60c部分地限定周向间隙66a。随着分支端部60a远离磁通突出部44与分支42之间的接合部位并且朝向返回件开口54a延伸,该分支端部60a朝向支撑该分支42的相应主干40周向地延伸。类似地,随着分支端部60c远离磁通突出部44与分支42之间的接合部位并且朝向返回件开口54a延伸,该分支端部60c朝向支撑该分支42的相应主干40周向地延伸。
126.周向间隙66a具有第一径向部分,该第一径向部分沿着周向间隙66a的径向范围朝向马达轴线a-a变窄。每个周向间隙66a具有第二径向部分,该第二径向部分沿着该周向间隙66a的径向范围朝向马达轴线a-a变宽。第一径向部分被限定在周向间隙66a的周向侧上的磁通突出部44之间。第二径向部分被限定在相邻的分支端部60a、60c之间。周向间隙66a由此可以被认为具有沙漏构型。在沿着每个周向间隙66a的任何径向位置处的周向间隙66a的周向宽度大于在距轴线a-a相同径向距离处的间隔间隙52或周向间隙66b的周向宽度。
127.分支端部60b和分支端部60d部分地限定周向间隙66b。随着分支端部60b远离磁通突出部44与分支42之间的接合部位并且朝向返回件开口54b延伸,该分支端部60b可以朝向支撑该分支42的相应主干40周向地延伸。在一些示例中,分支端部60b仅径向地延伸,以使得分支端部60b不朝向该分支42的主干40倾斜。随着分支端部60d远离磁通突出部44与分支42之间的接合部位并且朝向返回件开口54b延伸,该分支端部60d朝向支撑该分支42的相应主干40周向地延伸。
128.周向间隙66b可以具有第一径向部分,该第一径向部分沿着周向间隙66b的径向范围远离空气间隙30(图1和图2a)朝向马达轴线a-a变窄。每个周向间隙66b包括第二径向部分,该第二径向部分沿着周向间隙66b的径向范围朝向马达轴线a-a变宽。第一径向部分被限定在周向间隙66b的周向侧上的磁通突出部44之间。第二径向部分被限定在相邻的分支端部60b、60d之间。周向间隙66b可以被认为具有沙漏构型。
129.分支端部60a-60d沿周向倾斜,以将轴向返回件28和磁通突出部44定位在围绕马达轴线a-a沿周向的所期望的位置处。轴向返回件28在形成相组件22的磁通环24中的相邻的磁通环之间延伸并且接触该相邻的磁通环。一对轴向返回件28设置在每个返回件开口54a中,并且一对轴向返回件28设置在每个返回件开口54b中。轴向返回件28包括平面表面,该平面表面接触分支42的返回件对接表面58的平面表面。周向间隙66a比周向间隙66b更宽,以使得返回件开口54a中的轴向返回件28比在返回件开口54b中的轴向返回件28相对于彼此偏移更大的距离。返回件开口54a中的轴向返回件28之间的周向间隔为电连接器提供了用于在这些轴向返回件28之间径向地延伸并且延伸到线圈26的路径(最佳地参见图3a)。
130.相对于马达轴线a-a在沿着周向间隙66a的每个径向位置处的每个周向间隙66a的宽度大于在相同径向位置处的周向间隙66b的宽度。相邻分支42与限定周向间隙66a的磁通突出部44之间的分隔距离大于分支42与限定周向间隙66b的磁通突出部44之间的分隔距
离。如下文更详细讨论的,周向间隙66a为线圈连接器50b(最佳地参见图5c和图5d)提供开口以从与轴向返回件28相反的径向侧线圈26、围绕线圈26延伸并且穿过在这些轴向返回件28之间的导线间隙67,以有利于与ac电源的电连接。
131.周向间隙66b设置在两个横向设置的轴向返回件28之间的接合部位的径向外侧。周向间隙66b将相邻的分支42分开,以使得那些相邻的分支42相对于彼此周向地间隔开。周向间隙66b从磁通环24去除材料,从而提供更轻重量的电机10。相邻分支42之间的周向间隙66a、66b抑制涡流的形成。周向间隙66a、66b由此也防止围绕马达轴线a-a形成连续电路。周向间隙66b比周向间隙66a在周向上更窄。如此,与周向间隙66b相关联的轴向返回件28之间的间隙69比与周向间隙66a相关联的轴向返回件28之间的间隙67更窄。轴向返回件28的围绕轴线a-a的尺寸变化和不对称间隔有利于紧凑布置中的较大的轴向返回件28,从而提供有效、紧凑的电机。轴向返回件28关于马达轴线a-a不对称地设置,并且在所示示例中,在相邻的轴向返回件28之间具有三个不同的分隔距离。与包括主干40和相关联的分支42的同一树形件相关联的轴向返回件28被该树形件的主干40间隔开,从而形成第一尺寸的间隙。相邻树形件的轴向返回件由间隙67、69中的一个间隙间隔开,该间隙67、69具有彼此不同的并且与由主干40产生的间隙的尺寸不同的尺寸。
132.轴向返回件28围绕马达轴线a-a周向地、不均匀地排列。形成轴向返回件28的层压件叠置件由此围绕马达轴线a-a周向地、不均匀地排列。形成轴向返回件28的层压件叠置件围绕马达轴线a-a周向地、不均匀地排列,以使得第一对相邻的层压件叠置件在其之间具有第一分隔距离,并且第二对相邻的层压件叠置件在其之间具有与第一分隔距离不同的第二分隔距离。形成轴向返回件28的层压件叠置件围绕马达轴线a-a周向地、不均匀地排列,以使得第三对相邻的层压件叠置件在其之间具有第三分隔距离,该第三分隔距离不同于第一分隔距离和第二分隔距离。
133.磁通环24围绕翻转轴线b-b以能够操作的方式对齐,以使得磁通环24可以形成相组件22的两个磁通环。翻转轴线b-b将磁通环24划分成第一侧向部分62a和第二侧向部分62b。磁通环24围绕翻转轴线b-b以能够操作的方式对齐,以使得相组件22可以由具有相同基础构型的磁通环24形成。例如,图3a中的相组件22a的图3a中的磁通环24a和图3a中的磁通环24b两者具有相同的基础构型。如果两个磁通环24a、24b以相同的轴向方向定向,则磁通环24a、24b将轴向地对齐。
134.磁通环24关于翻转轴线b-b以能够操作的方式对齐,以有利于形成相组件22。磁通环24被构造成使得单个磁通环24可以被用于形成相组件22的每个相的半部。每个磁通环24具有朝向相组件22的线圈26定向的面向侧。每个磁通环24具有远离相组件22的线圈26定向的远离侧。形成每个磁通环24的层压片轴向地叠置在面向侧与远离侧之间。线圈26因此被架在面向侧之间。面向侧朝向彼此定向,而远离侧远离彼此定向。齿48在面向侧上悬伸出,以使得线圈处于由磁通环24的面向侧、磁通环24的齿48和轴向返回件28限定的环形(toroidal)室中。
135.例如,第一磁通环24被定向成使得该第一磁通环的齿48在相对于马达轴线a-a的第一轴向方向上延伸,并且第二磁通环24被定向成使得该第二磁通环的齿48在相反的第二轴向方向上延伸。第二磁通环24围绕翻转轴线b-b旋转到与第一磁通环24的第一定向不同的第二定向。在磁通环24处于不同定向的情况下,每个磁通环24的返回件开口54轴向地对
齐,同时每个磁通环24的磁通突出部44轴向地错位。在两个磁通环24处于相反的定向的情况下,相组件22的第一磁通环24的返回件开口54a与相组件22的第二磁通环24的返回件开口54a轴向地对齐,以有利于安装轴向返回件28。成对的磁通环24的返回件开口54b类似地对齐。因为主干40和返回件对接表面58部分地限定了返回件开口54,因此主干40和返回件对接表面58轴向地对齐。返回件对接表面58对齐以有利于轴向返回件28电连接该成对的磁通环24。
136.对齐的返回件开口54有利于安装轴向返回件28。在一些示例中,设置在磁通环24的第一侧向部分62a上的返回件开口54是形成在磁通环24的第二侧向部分62b上的返回件开口54的关于翻转轴线b-b的镜像图像。在所示示例中,返回件开口54a中的一个围绕轴线b-b自对齐,并且返回件开口54b中的一个围绕轴线b-b自对齐。
137.与返回件开口54不同,磁通突出部44在形成相组件22的相对的磁通环24之间轴向地错位。第一磁通环24的磁通突出部44从第二磁通环24的磁通突出部44周向地偏移,以形成磁通突出部44的磁通成对的集合。
138.相组件22的第一磁通环24上的返回件开口54和磁通突出部44的位置是相组件22的第二磁通环24的返回件开口54和磁通突出部44的位置的翻转镜像。与第一磁通环24相关联的位置是与第二磁通环24相关联的位置的翻转镜像,以使得第一磁通环24的磁通突出部44的相对于该第一磁通环24的面向侧的位置与第二磁通环24的磁通突出部44的相对于该第二磁通环24的远离侧的位置相同。与第一磁通环24相关联的位置是与第二磁通环24相关联的位置的翻转镜像,以使得第一磁通环24的返回件开口54相对于该第一磁通环24的面向侧的位置与返回件开口54的相对于该第二磁通环24的面向侧和远离侧两者的位置相同。与第一磁通环24相关联的位置是与第二磁通环24相关联的位置的翻转镜像,以使得如果第一磁通环24和第二磁通环24轴向地对齐,并且第一磁通环和第二磁通环24中的每个磁通环的第一面向侧面向相同的轴向方向,并且第一磁通环24的磁通突出部44与第二磁通环24的磁通突出部44轴向地对齐,则第一磁通环24的返回件开口54与第二磁通环24的返回件开口54轴向地对齐。
139.在所示示例中,返回件开口54被设计为开口o1-o6。返回件开口o1、o3和o5由返回件开口54a形成。返回件开口o1被构造成围绕翻转轴线b-b与其自身以能够操作的方式对齐。当组装相组件22时,第一磁通环24中的返回件开口o1的接收部分56a与相对的第二磁通环24的返回件开口o1的接收部分56b对齐。如此,单个轴向返回件28延伸穿过第一磁通环24中的开口o1的接收部分56a并且穿过第二磁通环24中的开口o1的接收部分56b。返回件开口o3绕轴线b-b与返回件开口o5对齐,以使得返回件开口o3和o5在相组件22的磁通环24中轴向地对齐。如此,轴向返回件28可以延伸穿过第一磁通环24的返回件开口o3并且穿过第二磁通环24的开口o5。
140.返回件开口o2、o4和o6由返回件开口54b形成。返回件开口o4相对于其自身围绕轴线b-b以能够旋转的方式对齐。当组装相组件22时,第一磁通环24中的返回件开口o4的接收部分56a与相对的第二磁通环24的返回件开口o4的接收部分56b对齐。如此,单个轴向返回件28可以延伸穿过第一磁通环24中的开口o4的接收部分56a并且穿过第二磁通环24中的开口o4的接收部分56b。返回件开口o2与返回件开口o6围绕轴线b-b以能够操作的方式对齐,以使得返回件开口o2和o6在相组件22的磁通环24中轴向地对齐。如此,轴向返回件28可以
延伸穿过第一磁通环24的返回件开口o2并穿过第二磁通环24的开口o6。
141.虽然每个侧向部分62a、62b的返回件开口54a、54b围绕轴线b-b以能够旋转的方式对齐,但是磁通突出部44绕轴线b-b以能够旋转的方式错位。设置在第一侧向部分62a上的磁通突出部44的子集合与第二侧向部分62b上的磁通突出部44不成镜像。磁通环24的第一侧向部分62a上的磁通突出部44与第二侧向部分62b的相邻的磁通突出部44之间的间隙(例如,与间隔间隙52或周向间隙66a、66b中的一个间隙)轴向地对齐。磁通环24的第二侧向部分62b上的磁通突出部44与第一侧向部分62a的相邻的磁通突出部44之间的间隙轴向地对齐。
142.每个磁通环24因此关于翻转轴线b-b部分地成镜像。磁通环24的在马达轴线a-a与分支42的返回件对接表面58之间的沿径向的部分,包括该返回件对接表面58(例如,环本体36、主干40、返回件开口54和返回件对接表面58),关于轴线b-b成镜像。相反,磁通环24的在分支42的返回件对接表面58与空气间隙30(图1和图2a)之间的沿径向的部分(例如,分支42、磁通突出部44、间隔间隙52、周向间隙66a、66b)关于轴线b-b不成镜像,而是围绕轴线b-b错位。
143.在所示示例中,定位器64从环本体36径向地向内延伸。定位器64有利于将磁通环24中的两个磁通环组装成相组件22。定位器64还有利于将这些相组件22组装在一起以形成定子,例如定子14(最佳地参见图2b和图6a至图6c)。在所示示例中,磁通环24包括对应于电机10的三个相(图1和图2a)的三个定位器64a、64b、64c。然而应当理解,磁通环24可以包括任何期望数量的定位器64,以用于对齐磁通环24以组装成相组件22和/或定子14。
144.定位器64被形成为从环本体36延伸的突出部。在所示示例中,定位器64从环本体36朝向马达轴线a-a径向地延伸。定位器64由此远离空气间隙30径向地延伸。虽然定位器64被示出为正对齐特征,以使得定位器64由从磁通环24延伸的材料形成,但是应当理解,定位器64可以以任何期望的方式形成。例如,定位器64可以被形成为负对齐特征,例如通过凹口、凹槽或其他的材料去除来形成。
145.在所示示例中,定位器64a、64b、64c具有不同的构型,以便有利于每个定位器64a、64b、64c的视觉识别。定位器64a被形成为突片。定位器64b被形成为具有凹口的突片。定位器64c被形成为具有多个凹口的突片。然而应当理解,定位器64a-64c可以以任何期望的方式形成。
146.定位器64a设置在翻转轴线b-b上,并且关于该翻转轴线b-b成镜像。如此,在所示示例中,轴线b-b平分定位器64a。定位器64b和定位器64c绕马达轴线a-a相对于定位器64a周向地偏移。定位器64b可以与定位器64c位于沿着轴线b-b的相同轴向位置处,以使得定位器64b、64c的位置关于轴线b-b成镜像。
147.定位器64a绕马达轴线a-a与定位器64b间隔第一偏移,定位器64a绕马达轴线a-a与定位器64c间隔第二偏移,并且定位器64b绕马达轴线a-a与定位器64c间隔第三偏移。定位器64a-64c的位置绕马达轴线a-a不旋转对称。在一些示例中,第一偏移与第二偏移相同,而第三偏移不同于第一偏移和第二偏移。在一个示例中,第一偏移和第二偏移小于120度,而第三偏移大于120度。定位器64之间的不对称偏移有利于相组件22沿着轴线a-a的轴向对齐以形成定子14,如下文更详细讨论的。
148.磁通环24被构造成有利于轴向返回件28的大的总宽度,同时还为线圈连接器50b
提供从线圈26径向地向内延伸的位置。磁通环24包括关于马达轴线a-a不对称设置的部件,以有利于围绕轴线b-b的操作对齐以及轴向返回件28和磁通突出部44的期望定位。磁通突出部44和相关联的齿48需要位于某些周向位置处以便与相组件22中的相关联的磁通环24成磁通对。然而,轴向返回件28不受如此约束。轴向返回件28之间的间距总体上是自由的,只要在轴向返回件28与相组件22的每个磁通环24之间形成平面界面即可。
149.相对于周向间隙66a更窄的周向间隙66b,在不牺牲轴向返回件28的尺寸的情况下,提供了更小总体尺寸的磁通环24。例如,如果每个周向间隙66被构造为周向间隙66a,则磁通环24将需要具有更大的直径,并且因此包括更多的材料,以支撑如图所示的轴向返回件28的相同尺寸,从而增加了电机10的重量和尺寸。
150.在所示示例中,磁通环24包括三个周向间隙66a的集合。如下文更详细讨论的,磁通环24可以被用于形成定子14的每个磁通环24a-24f(图2b、图6a至图6c)。每个周向间隙66a为线圈连接器50b提供围绕其线圈26的轴向端部和朝向马达轴线a-a径向地向内延伸的位置。所述三个单独的周向间隙66a中的每个周向间隙被构造成为三相马达的所述三个相组件22中的每个相组件的线圈连接器50b提供延伸穿过的位置。
151.返回件开口54关于马达轴线a-a不对称地间隔开,以使得轴向返回件28关于马达轴线a-a不对称地设置。轴向返回件28的不对称间隔在该返回件开口54a内的轴向返回件28之间创建间隙67,从而允许线圈连接器50a、50b在轴向返回件28之间径向地向内延伸至定子14的芯部。主干40关于马达轴线a-a不对称,以为不同的返回件开口54a、54b设置尺寸。主干40围绕马达轴线a-a周向地不均匀地排列,以使得第一对相邻主干40在其之间具有第一分隔距离,并且第二对相邻主干40在其之间具有不同于第一分隔距离的第二分隔距离。在一些示例中,主干40围绕马达轴线a-a周向地、不均匀地排列,以使得第三对相邻主干40在其之间具有第三分隔距离,该第三分隔距离不同于第一分隔距离和第二分隔距离。
152.分支42围绕马达轴线a-a不对称地间隔开。分支42围绕马达轴线a-a周向地、不均匀地排列,以使得第一对相邻分支42或分支42的组在其之间具有第一分隔距离,并且第二对相邻分支42或分支42的组在其之间具有第二分隔距离,该第二分隔距离不同于第一分隔距离。在一些示例中,分支42围绕马达轴线a-a周向地、不均匀地排列,以使得第三对相邻分支42或分支42的组在其之间具有第三分隔距离,该第三分隔距离不同于第一分隔距离和第二分隔距离。
153.分支42的不对称间隔将形成相组件22的相对的磁通环24的返回件对接表面58定位在合适的位置处以与轴向返回件28形成平面界面。轴向返回件28与相组件22的磁通环24中的每个磁通环上的平面对接表面58对接。如此,轴向返回件28键接到返回件开口54,从而确保磁通环24之间的适当对齐。分支42的不对称间隔还将相组件22的磁通环24中的每个磁通环中的磁通突出部44在操作期间相对于彼此适当地定位。磁通突出部44关于马达轴线a-a不对称地间隔开。磁通突出部44的不对称间隔有利于围绕轴线b-b的翻转,以使得磁通突出部44在形成相组件22的成对的磁通环24上轴向地错位。
154.每个分支42的终端磁通突出部44可以相对于该磁通突出部44从其延伸的分支42的返回件对接表面58周向地延伸。终端磁通突出部44是与周向间隙66a、66b中的一个周向间隙相邻并且部分地限定该周向间隙的那些磁通突出部44。磁通突出部44被构造成使得沿着每个分支42在周向方向cd1上最远的磁通突出部44相对于该分支42的返回件对接表面58
周向地向外延伸。第一周向方向cd1在图4a的视图中为逆时针,并且在图4b的视图中为顺时针。终端磁通突出部44的相对于分支42的周向突出部定位磁通突出部44,以用于围绕轴线b-b操作地翻转并且形成磁通突出部44中的磁通成对的磁通突出部。在所示示例中,限定周向间隙66a并且相对于分支端部60a径向地延伸的磁通突出部44相对于相关联的返回件对接表面58周向地延伸最远。
155.径向线r1从马达轴线a-a延伸穿过分支端部60a与返回件对接表面58之间的接合部位。径向线r1延伸穿过磁通突出部44中的在周向方向cd1上最远的并且部分地限定周向间隙66a的终端磁通突出部。径向线r1周向地设置在该磁通突出部44的齿48与该分支42的其余的磁通突出部44的齿48之间。径向线r1可以部分地延伸穿过该齿48。该磁通突出部44的被划分的部分(即,相对于径向线r1在周向方向cd1上延伸的部分)可以包括高达整个齿48。在各种不同示例中,磁通突出部44的被划分的部分可以包括该磁通突出部44的齿48的体积的至少95%或更多和/或该磁通突出部44的齿48的轴向端部74a的面积的至少95%或更多。
156.从马达轴线a-a延伸穿过分支端部60d与返回件对接表面58之间的接合部位的径向线r2延伸穿过磁通突出部44中的在周向方向cd1上最远的并且部分地限定周向间隙66b的终端磁通突出部。径向线r2周向地设置在该磁通突出部44的齿48与该分支42的其余的磁通突出部44的齿48之间。径向线r2可以部分地延伸穿过该齿48。在一些示例中,该磁通突出部44的被划分的部分(即,相对于径向线r2在周向方向cd1上延伸的部分)可以不包括齿48的部分。磁通突出部44的被划分的部分可以包括该磁通突出部44的齿48的体积的高达1%、2%、5%或更多和/或该磁通突出部44的齿48的轴向端部74a的面积的高达1%、2%、5%或更多。
157.径向线r3延伸穿过支撑具有分支端部60c、60d的分支42的主干40的中心。径向线r4延伸穿过支撑具有分支端部60a、60b的分支42的主干40的中心。主干40可以设置在每个分支42的基部的中点处,以使得每个返回件对接表面58远离主干40延伸相同的距离。主干40可以由此平分每个分支42的基部。磁通突出部44在分支42上相对于径向线r3、r4周向地偏移,以使得该径向线r3、r4不延伸穿过该分支42上的磁通突出部44的中间的一个磁通突出部的径向中心线。每个分支42的磁通突出部44的集合由此从支撑该分支42的主干40周向地偏移。在所示示例中,具有分支端部60c、60d的分支42上的磁通突出部44比具有基部端部60a、60b的分支42上的磁通突出部44偏移更小的程度。磁通突出部44的周向偏移有利于定位返回件开口54a、54b和磁通突出部44,以用于围绕翻转轴线b-b操作翻转。
158.为了形成相组件22,第一磁通环24与第二磁通环24相对设置。第一磁通环24和第二磁通环24被定位成与马达轴线a-a同轴。磁通环24中的每个磁通环具有相同的基础构型,该基础构型限定了每个磁通环24的返回件开口54的径向位置和周向位置以及每个磁通环24的磁通突出部44的径向位置和周向位置。因此磁通环24可以被认为具有相同的操作几何形状。
159.第一磁通环24位于马达轴线a-a上的第一位置,并且第二磁通环24位于马达轴线a-a上的一位置,该位置相对于第一位置具有关于翻转轴线b-b的翻转定向。第一磁通环24的定位器64a与第二磁通环24的定位器64a轴向地对齐,以使两个磁通环24相对于彼此适当地定位。如此,第一磁通环24的翻转轴线b-b被设置成平行于相组件22的第二磁通环24的翻
转轴线b-b并且与该翻转轴线b-b在共同平面中。在定位器64a轴向地对齐的情况下,第一磁通环24的定位器64b与第二磁通环24的定位器64c轴向地对齐,并且第一磁通环24的定位器64c与第二磁通环24的定位器64b轴向地对齐。在定位器64a对齐的情况下,第一磁通环24的齿48延伸到第二磁通环24的齿48之间的周向空间中,并且第二磁通环24的齿48延伸到第一磁通环24的齿48之间的周向空间中。
160.定位器64围绕马达轴线a-a的不对称间隔有利于适当对齐并且提供防错。如果第一磁通环24的定位器64a与第二磁通环24的定位器64b、64c中的任一个轴向地对齐,则定位器64中的其他定位器将轴向地错位。成对的定位器64之间的轴向地错位将成对的磁通环24识别为错位。定位器64a、64b、64c之间的不对称间隔还有利于将由磁通环24的相同构型形成的相组件22组装到定子14中,如下文更详细讨论的。
161.线圈26定位于第一磁通环24与第二磁通环24之间,以使得每个磁通环的面向侧面向线圈26。第一磁通环24的磁通突出部44相对于第二磁通环44的磁通突出部44周向地偏移。每个磁通环24的返回件开口54轴向地对齐。第一磁通环24的返回件开口54和磁通突出部44相对于该第一磁通环24的面向侧的位置与返回件开口54和磁通突出部44相对于第二磁通环24的远离侧的位置相同。轴向返回件28插入到磁通环24的返回件开口54中,以使得轴向返回件28桥接在磁通环24之间,并且使得轴向返回件28围绕马达轴线a-a排列。
162.磁通环24提供了显著的优点。返回件开口54关于轴线a-a不对称,但是关于翻转轴线b-b对称。围绕轴线a-a的不对称间距为轴向返回件28提供安装位置,并且有利于在轴向返回件28之间形成间隙67,从而为线圈连接器50a、50b提供在这些轴向返回件28之间延伸的位置,而不会减小轴向返回件28的尺寸。保持轴向返回件28的较大尺寸有利于紧凑布置中的有效马达操作。磁通突出部44关于马达轴线a-a不对称,并且绕翻转轴线b-b不是旋转对称的。磁通突出部44的不对称有利于周向间隙66a、66b的尺寸设置、以及在相组件22的相对的磁通环24中磁通突出部44相对于彼此的适当定位。磁通环24关于翻转轴线b-b以能够操作的方式对齐,以使得磁通环24的单个基部构型可以被用于形成相组件22的两个磁通环24。此外,磁通环24能够围绕马达轴线a-a以能够旋转的方式定位,从而形成定子14的每个相组件22。这种构型减少了零部件的数量,并且允许使用单个零部件来形成每个磁通环24,从而简化了制造和组装。仅需要制造单个构型的磁通环24来生产相组件22和定子14中的每个磁通环。
163.图5a是相组件22a的等距视图。图5b是移除了磁通环24a的相组件22a的等距视图。图5c是相组件22a的一部分的放大等距视图。图5d是沿图5a中的线d-d截取的放大剖视图。将一起讨论图5a至图5d。相组件22a包括磁通环24a、24b;线圈26;和轴向返回件28。磁通环24a包括环本体36a、主干40a、分支42a和磁通突出部44a。磁通环24b包括环本体36b、主干40b、分支42b和磁通突出部44b。每个磁通突出部44a、44b分别包括保持件46a、46b和齿48a、48b。示出了线圈26的线圈连接器50a、50b。
164.磁通环24a、24b围绕马达轴线a-a环形地设置。线圈26轴向地设置在磁通环24a、24b之间。更具体地,线圈26轴向地设置在磁通环24a的分支42与磁通环24b的分支42之间。线圈26还径向地设置在每个磁通环24a、24b的齿48a、48b的部分与轴向返回件28之间。轴向返回件28相对于马达轴线a-a轴向地定向,并且设置在线圈26的与齿48a、48b相反的径向侧上。轴向返回件28延伸到形成在磁通环24a和磁通环24b的每个中的磁通环的返回件开口54
中,并且在平坦界面处直接地接触分支42a、42b。
165.磁通环24a处于第一取向,其中齿48a沿第一轴向方向ad1定向,并且磁通环24b处于第二取向,其中齿48b沿与第一轴向方向ad1相反的第二轴向方向ad2定向。磁通环24具有与磁通环24b相同的构型,除了磁通环24a围绕与马达轴线a-a正交的翻转轴线b-b(图4a和图4b)旋转。磁通环24a、24b都不围绕与马达轴线a-a正交的轴线旋转对称。与磁通环24a、24b不同,相组件22a围绕与马达轴线a-a正交的轴线旋转对称。更具体地,相组件22a围绕与马达轴线a-a正交的轴线具有双重旋转对称,该轴线与翻转轴线b-b在同一平面上并且轴向地设置在磁通环24a、24b之间。
166.磁通环24a、24b不是彼此的镜像图像,而是以能够操作的方式对齐,以使得在磁通环24a处于第一取向并且磁通环24b处于第二取向的情况下,磁通环24a的返回件开口54a、54b分别与磁通环24b的返回件开口54a、54b轴向地且周向地对齐。磁通环24a的齿48a与磁通环24b的齿48b轴向地错位,以在每个磁通环24a、24b的齿48a、48b中的成对的齿之间形成磁通回路。磁通环24a的齿48a围绕轴线a-a以环形的方式插入在磁通环24b的齿48b之间。
167.线圈连接器50a、50b从线圈26延伸并且为线圈26提供电连接。线圈连接器50a、50b可以是形成线圈的围绕马达轴线a-a缠绕的导线的终端。因为电机10是外转子马达,因此线圈连接器50a、50b中的每个线圈连接器都朝向马达轴线a-a径向地向内延伸。
168.线圈连接器50a从线圈26的径向内侧延伸。线圈连接器50a在返回件开口54a中的轴向返回件28中的相邻的轴向返回件之间延伸到相组件22的内部。如以上所讨论的,返回件开口54a的尺寸被设置为在该返回件开口54a中周向地间隔开轴向返回件28,并且为线圈连接器50a、50b提供间隙67以便在轴向返回件28之间延伸。因为线圈连接器50a从线圈26a的径向内侧延伸,因此该线圈连接器50a可以在不相对于线圈26的轴向侧轴向地突出的情况下,从线圈26直接径向地向内延伸到相组件22的内部。
169.与线圈连接器50a不同,线圈连接器50b从线圈26的径向外侧延伸到相组件22的内部。线圈连接器50b必须相对于线圈26轴向地突出以越过线圈26的轴向侧并且围绕线圈26到相组件22的内部。线圈连接器50a和线圈连接器50b中的每个线圈连接器延伸穿过环本体36a与环本体36b之间的轴向间隙。
170.磁通环24a的分支42中的相邻的分支之间的周向间隙66a有利于将线圈连接器50b路由到相组件22的内部。分支42之间的限定周向间隙66a的间距为线圈连接器50b提供了相对于线圈26轴向地突出并且径向地向内并围绕线圈26的轴向面延伸的位置。
171.如图5d中最佳看到的,线圈连接器50b相对于线圈26和轴线a-a轴向地突出,以使得线圈连接器50b相对于轴线a-a与磁通环24a的部分周向地重叠。线圈连接器50b可以轴向地延伸以在限定周向间隙66a的磁通突出部44a之间周向地设置,并且可以周向地设置在限定周向间隙66a的分支42a之间。在不从磁通环24去除层压材料的情况下,周向间隙66a为线圈连接器50b提供径向地向内延伸的位置。行进穿过周向间隙66a的线圈连接器50b有利于电机10的紧凑布置,这是因为每个相组件22的沿着马达轴线a-a的长度不需要扩大来提供用于在磁通环24a与线圈26之间路由线圈连接器50b的空间。线圈连接器50b不在磁通环24a、24b的分支42或磁通突出部44之间轴向地设置,而是在磁通环24a的层压体部分之间周向地设置。
172.磁通环24a、24b提供显著的优点。周向间隙66a形成在分支42中的相邻的分支之
间,并且定位轴向返回件28,以有利于将线圈连接器50a、50b路由到相组件22a的芯部。轴向返回件28关于轴线a-a不对称以为线圈连接器50a、50b提供在该轴向返回件之间延伸的间隙67。周向间隙66a为线圈连接器50b提供空间以用于相对于线圈26沿轴线a-a轴向地延伸以围绕线圈26的轴向面路由。线圈连接器50b轴向地延伸以与磁通环24a的部分周向地重叠。然而,相组件22a的长度和形成磁通环24a、24b的层压体相对于轴线a-a的轴向长度不受影响。周向间隙66a允许线圈连接器50b在线圈26的轴向侧周围延伸并且在限定周向间隙66a的相邻的分支42之间延伸。使线圈连接器50b路由穿过周向间隙66a有利于相组件22a的紧凑布置,并且允许磁通环24a、24b尽可能地沿轴线a-a轴向地靠近线圈26定位。此外,周向间隙66a有利于沿单个周向方向缠绕形成线圈26的导线,从而提供单个缠绕的线圈26。
173.图6a是定子14的立面端视图。图6b是沿图6a中的线b-b截取的剖视图。图6c是定子14的俯视图。将一起讨论图6a至图6c。定子14包括相组件22a、相组件22b和相组件22c。相组件22a包括磁通环24a、24b;线圈26和轴向返回件28;相组件22b包括磁通环24c、24d;线圈26和轴向返回件28;相组件22c包括磁通环24e、24f;线圈26和轴向返回件28。
174.定子14由相组件22a-22c形成,每个相组件具有共同的相构型。相组件22a设置在定子14的第一轴向端部处,相组件22c设置在定子14的第二轴向端部处,并且相组件22b轴向地设置在相组件22a与相组件22c之间。相组件22a-22c沿着马达轴线a-a轴向地叠置并且与该马达轴线a-a同轴地设置。
175.相组件22a由设置在线圈26的相反的轴向侧上的成对的磁通环24a、24b形成。相组件22a包括围绕周向轴线a-a的轴向返回件28的阵列。轴向返回件28在磁通环24a、24b中的每个磁通环之间延伸并且接触每个磁通环。轴向返回件28电连接磁通环24a、24b。相组件22b由设置在线圈26的轴向侧上的成对的磁通环24c、24d形成。相组件22b包括围绕周向轴线a-a的轴向返回件28的阵列。轴向返回件28在磁通环24c、24d中的每个磁通环之间延伸并且接触每个磁通环。轴向返回件28电连接磁通环24c、24d。相组件22c由设置在线圈26的轴向侧上的成对的磁通环24e、24f形成。相组件22c包括围绕周向轴线a-a的轴向返回件28c的阵列。轴向返回件28在磁通环24e、24f中的每个磁通环之间延伸并且接触每个磁通环。轴向返回件28电连接磁通环24e、24f。
176.如以上所讨论的,可以使用磁通环24的单个基础构型以形成相组件22中的每个磁通环24。由这种磁通环24形成的每个相组件22具有相同的基础相构型。在所示示例中,磁通环24a-24f中的每个磁通环都具有相同的基础构型,但是围绕马达轴线a-a和/或围绕它们的翻转轴线b-b(图4a和图4b)彼此相对偏移。例如,磁通环24b相对于磁通环24a在翻转轴线b-b上翻转,但不相对于磁通环24a围绕轴线a-a旋转。磁通环24c相对于磁通环24a围绕马达轴线a-a旋转。磁通环24d相对于磁通环24c在翻转轴线b-b上翻转,但不相对于磁通环24c围绕马达轴线a-a旋转。磁通环24e相对于磁通环24a和磁通环24c两者围绕马达轴线a-a旋转。磁通环24f相对于磁通环24e在翻转轴线b-b上翻转,但不相对于磁通环24e围绕马达轴线a-a旋转。
177.磁通环24a-24f具有相同的基础构型,以在形成相组件22a-22c的磁通环24a-24f中的成对的磁通环之间对齐返回件开口54并且使齿48错位。以共同的基础构型形成每个磁通环24a-24f简化了制造,因为只需要单一零部件类型来形成三相定子14的六个磁通环24a-24f中的每个磁通环。可以使用磁通环24的单一构型,以通过围绕马达轴线a-a旋转基
础磁通环24和/或围绕轴线b-b翻转基础磁通环24来形成定子14的所有六个磁通环。
178.每个相组件22a-22c由此具有相同的基础相构型。相组件22a-22c沿着马达轴线a-a轴向地叠置。相组件22a-22c围绕马达轴线a-a相对于彼此旋转偏移以适当地偏移相组件22a-22c,以产生用于驱动转子12的电磁通量。相组件22a-22c围绕轴线a-a相对于彼此旋转偏移以形成定子14。如以上所讨论的,用于所示的三相定子的ac信号被提供给120度电偏移的每个相组件22a-22c。然而,相组件22a-22c不是绕马达轴线a-a相对于彼此机械地偏移120度。在所示示例中,相组件22a相对于相组件22b绕马达轴线a-a在周向cd2上偏移小于120度。相组件22c相对于相组件22b绕马达轴线a-a在周向方向cd1上偏移小于120度。围绕马达轴线a-a的机械偏移将每个相组件22a-22c的磁通突出部44中的磁通成对的磁通突出部定位在相对于彼此的适当位置以及时地产生电磁通量,以作用在磁体32上并且驱动转子12的旋转。
179.每个相组件22a-22c的共同部件围绕马达轴线a-a沿周向相对于彼此偏移,以使得这些部件不沿着马达轴线a-a轴向地对齐。如图6b最佳看到的,相组件22a的轴向返回件28相对于相组件22b和相组件22c两者的轴向返回件28绕马达轴线a-a偏移。类似地,相组件22b的轴向返回件28相对于相组件22c的轴向返回件28绕马达轴线a-a偏移。如图6a所示,用于每个相组件22a-22c的线圈连接器50a、50b在围绕马达轴线a-a的不同周向位置处延伸到定子14的内部。
180.如图6c中最佳看到的,磁通环24a的齿48a沿着马达轴线a-a与齿48b-48f轴向地错位,以使得延伸穿过齿48a的周向中点的、与马达轴线a-a平行的线不延伸穿过齿48b-48f中的任何齿的周向中点;齿48b沿着马达轴线a-a与齿48c-48f轴向地错位;齿48c沿着马达轴线a-a与齿48d-48f轴向地错位;齿48d沿着马达轴线a-a与齿48e、48f轴向地错位;齿48d沿着马达轴线a-a与齿48f轴向地错位。如此,在每个相组件22中的磁通突出部44中的磁通成对的磁通突出部绕马达轴线a-a相对于其他相组件22中的磁通突出部44中的磁通成对的磁通突出部偏移。相组件22a-22c绕轴线a-a机械地偏移,以有利于通过传输通过相组件22a-22c的线圈26的异相ac信号来驱动转子12的旋转。
181.具体地参考图6b,利用定位器64以将相组件22a、22b、22c相对于彼此对齐以形成定子14。如以上所讨论的,定位器64a在形成每个相组件22a-22c的磁通环24a-24f中的成对的磁通环之间对齐。在定位器64a对齐的情况下,该成对的第一磁通环24(例如,用于相组件22a的磁通环24a)的定位器64b与该成对的第二磁通环24(例如,用于相组件22a的磁通环24b)的定位器64c对齐,并且该成对的第一磁通环24的定位器64c与该成对的第二磁通环的定位器64b对齐。
182.在所示示例中,定位器64在定子14内以三个轴向阵列设置。阵列中的一个阵列被认为是主对齐阵列,该主对齐阵列指示相组件22a、22b、22c沿着马达轴线a-a并且绕马达轴线a-a适当地对齐以形成定子14。该对齐阵列包括相对于马达轴线a-a轴向地对齐的三对定位器64。其他两个阵列包括相对于马达轴线a-a与该阵列的其他定位器64轴向地错位的至少一对定位器64。在所示示例中,对齐阵列的定位器64在第一轴向方向ad1上从磁通环24a到磁通环24f轴向地布置为定位器64b、定位器64c、定位器64a、定位器64a、定位器64c和定位器64b。
183.虽然将相组件22a-22c讨论为基于定位器64的各个不同的对来对齐以形成定子
14,但是应当理解,相组件22a-22c可以以任何期望的方式相对于彼此以能够操作的方式定位。例如,每个相组件22可以包括单个定位特征(例如,形成该相组件22的磁通环24的成对的定位器64a),该定位特征基于相组件22在定子14中的轴向位置而放置在相对于马达轴线a-a的期望的周向位置处。在定子14的组装期间,每个相组件22的定位特征可以定向在期望的位置处,以使每个相组件22相对于其他相组件22适当地定位。例如,一系列的三个槽可以围绕马达轴线a-a排列,并且可以通过将每个相组件22上的定位器64与槽对齐来定向相组件22。
184.相组件22a-22c被构造成使得定子14围绕定子翻转轴线c-c旋转对称。定子翻转轴线c-c正交于马达轴线a-a,并且沿着马达轴线a-a轴向地设置在沿轴向位于中间的相组件22的成对的定位器64a之间(例如,在相组件22b的磁通环24c、24d之间)。轴线c-c平行于磁通环24c的轴线b-b和磁通环24d的轴线b-b两者。轴线c-c设置在与延伸穿过磁通环24c的轴线b-b和磁通环24d的轴线b-b两者的平面相同的平面上。然而,相组件22a、22c绕马达轴线a-a相对于相组件22b的磁通环24c、24d旋转偏移。如此,轴线c-c横向于磁通环24a、24b的轴线b-b和磁通环24e、24f的轴线b-b定向。每个磁通环24a-24f围绕与马达轴线a-a正交的轴线不旋转对称。与磁通环24不同,定子14围绕与轴线a-a正交的轴线旋转对称。更具体地,定子14具有围绕定子翻转轴线c-c的双重旋转对称。
185.定子14提供了显著的优点。每个相组件22a、22b、22c可以具有相同的基础相构型。使相组件22a、22b、22c具有相同的基础构型减少了零部件的数量并且简化了制造。仅需要制造相组件22的单一构型来形成所示的三相定子14。具有相同构型的各个磁通环24a-24f围绕轴线a-a旋转并且关于轴线b-b翻转以形成磁通环24a-24f的六个不同取向,从而形成三相定子14。由此可以使用单一基础磁通环构型来形成定子14的六个不同零部件中的每个零部件,从而减少零部件的数量和材料成本,同时还简化了制造。定子14还围绕轴线c-c旋转对称,从而简化了定子14的安装和操作。
186.图7a是齿48的等距视图。图7b是图7a的齿48的立面侧视图。图7c是图7a的齿48的第一立面端视图。图7d是图7a的齿48的俯视图。图7e是图7a的齿48的第二立面端视图。将一起讨论图7a至图7e。齿48包括第一部分68、第二部分70、间隙面72和轴向端部74a、74b。第一部分68包括接触面76和夹持面78a、78b。接触面76包括侧向表面80a、80b和基部表面82。第二部分70包括轮廓部分(contoured portion)84。
187.齿48是粉末金属部件,该粉末金属部件包含具有期望的磁性能的压实的金属颗粒,诸如铁颗粒等。齿48在轴向端部74a与轴向端部74b之间轴向地伸长。轴向端部74a由第一部分68的轴向定向面形成。轴向端部74a是第一部分68的远端部。轴向端部74b由第二部分70的轴向定向面形成。轴向端部74b是第二部分70的远端部。
188.第一部分68可以在轴向端部74a与第一部分68和第二部分70之间的接合部位之间具有与马达轴线a-a正交的连续或几乎连续的截面轮廓。间隙面72可以被构造成在齿48与永磁体阵列20的磁体32之间产生在操作上一致的间隙。在一些示例中,间隙面72可以是平面的。从马达轴线a-a延伸的径向线可以正交于平面的间隙面72。间隙面72的形成在第一部分68上的部分可以是矩形的,并且沿着其相对于轴线a-a的轴向长度具有共同的周向宽度。间隙面72的形成在第二部分上的部分可以是矩形的,或者可以渐缩以朝向轴向端74b变窄,如下文更详细讨论的。虽然间隙面72被描述为平面的,但是应当理解,间隙面72可以具有使
得间隙面72是凸面(例如,用于外转子)和凹面(例如,用于内转子)中的一者的半径。齿48在间隙面72处的半径可以与设置有齿48的磁通突出部阵列38的径向外端部的半径相匹配。
189.夹持面78a相对于马达轴线a-a远离间隙面72的第一周向侧径向地且周向地延伸。夹持面78b相对于马达轴线a-a远离间隙面72的第二周向侧径向地且周向地延伸。如此,齿48在夹持面78a、78b之间沿着齿48的高度远离间隙面72径向地变宽。
190.接触面76在夹持面78a的与间隙面72相反的端部和夹持面78b的与间隙面72相反的端部之间延伸。侧向表面80a在夹持面78a的端部与基部表面82之间延伸。侧向表面80b在夹持面78b的端部与基部表面82之间延伸。侧向表面80a和侧向表面80b中的每个侧向表面可以是平面的。齿48的在侧向表面80a、80b之间的宽度沿着齿48的高度远离间隙面72变窄。
191.沿着侧向表面80a的平面横向于夹持面78a的平面和沿着侧向表面80b的平面。在一些示例中,侧向表面80a横向于夹持面78b的平面设置。在其他示例中,侧向表面80a的平面平行于沿着夹持面78b的平面。类似地,沿着侧向表面80b的平面横向于夹持面78b和侧向表面80aa的平面。在一些示例中,沿着侧向表面80b的平面横向于夹持面78a的平面。在其他示例中,侧向表面80b的平面平行于沿着夹持面78a的平面。基部表面82是形成齿48的与间隙面72相反的端部的弯曲表面。基部表面82限定在操作期间与空气间隙30间隔最远的齿48的端部。接触面76被构造成直接接触保持件46的层压体并且与保持件46的层压体对接,如下文更详细讨论的。
192.第二轴向部分70相对于马达轴线a-a从第一轴向部分68轴向地突出。第二部分70是渐缩的,以使得轴向端74b比轴向端部74a具有与马达轴线a-a正交的更小的截面面积。第二部分70在与第一部分68的接合部位与轴向端部74b之间渐缩。第二轴向端部74的沿与马达轴线a-a正交的平面截取的截面面积在第一部分68和第二部分70之间的接合部位与轴向端部74b之间减小。由间隙面72和外形部分84部分地限定第二部分70。外形部分84从间隙面72的第一周向侧延伸到间隙面72的第二周向侧。外形部分84由弯曲壁形成,该弯曲壁在第一部分68与轴向端部74b之间渐缩,以减小第二部分70的截面面积。当第二部分70的截面面积减小时,间隙面72在第一部分68和第二部分70上保持恒定的轮廓。然而应当理解,虽然间隙面72的宽度在第二部分70中可以变化,但是间隙面72的轮廓维持一致。例如,间隙面72可以在第一部分68和第二部分70两者上都是平面的。
193.外形部分84可以是平滑渐缩的,以使得外形部分84在轴向端部74b与第一部分68和第二部分70之间的接合部位之间提供恒定、平滑的过渡。第二部分70可以具有从轴向端部74b到由第一部分68形成的磁通传递部分的截面面积的轴向变化率,其是恒定的、线性的或弯曲的,在变化率上没有任何拐点或台阶。外形部分84从接触面76和夹持面78延伸并且与接触面76和夹持面78成一体。
194.在一些示例中,轴向端部74b包括对接表面,该对接表面由工具接合或以其他方式接合以在制造期间迫使齿48脱离模具。在所示示例中,突出部86b形成顶出特征,用于帮助在制造期间从模具顶出,并且防止在顶出过程期间在齿48上形成人造痕迹。突出部86b还有利于组装,并且提供在将齿48压配合到保持件46期间可以接合的表面。在所示示例中,突出部86b具有与轴线a-a正交的截面轮廓,其是与轴向端部74b的与轴线a-a正交的截面轮廓相同的形状,但是突出部86b的截面具有较小的面积。突出部86b包括轮廓边缘,用于提供到轴向端部74b的平滑过渡,这有助于在制造期间顶出并且防止形成人造痕迹。在所示示例中,
轴向端部74a还包括与突出部86b相似的突出部86a。突出部86a提供在齿48和保持件46的制造和/或组装期间可以被接触的对接表面。在所示示例中,突出部86a具有与轴线a-a正交的截面轮廓,其是与轴向端部74a的与轴线a-a正交的截面轮廓相同的形状,但是突出部86a的截面具有较小的面积。
195.图8是磁通环24的一部分的放大等距视图,示出了没有齿48的磁通突出部44的保持件46。保持件46包括保持件本体88;指状部90a、90b;径向端部92;接收室94和外侧96a、96b。指状部90a、90b分别包括远端部98a、98b;保持部分100a、100b;坐接部分102a、102b和过渡部分104a、104b。
196.保持件46从分支42延伸到径向端部92。保持件46从分支42突出,并且与相邻的保持件46周向地间隔开。保持件46由形成分支42的层压体形成。由此,保持件46可以是一体地形成的并且与分支42成一体。保持件46的轴向长度hl可以与分支42的轴向宽度相同。如此,保持件46可以在分支42的轴向侧之间完全延伸。保持件46的轴向长度hl在分支42与径向端部92之间沿着该保持件的相对于轴线a-a的径向高度保持恒定。
197.保持件本体88从分支42径向地延伸到接收室94。指状部90a、90b从保持件本体88延伸并且远离分支42延伸。指状部90a、90b限定保持件46的最接近空气间隙30(图1和图2a)和永磁体阵列20(图1和图2a)的部分。在图8中示出在保持件46中的相邻的保持件之间的间隔间隙52。如以上所讨论的,每个分支42上的终端保持件46与相邻的分支42上的相邻的保持件46间隔开周向间隙66a、66b(在图4a至4c中最佳看到)。保持件46在与分支42的接合部位和径向端部92之间变宽。径向端部92是保持件46的周向上最窄的部分。
198.指状部90a与指状部90b间隔开以在该指状部90a与指状部90b之间限定接收室94。指状部90a、90b分别从保持件本体88远离接收室94的基部110延伸到远端部98a、98b。接收室94包括轴向开口106a、106b和径向开口108。轴向开口106a、106b和径向开口108各自被限定在指状部90a、90b之间。径向开口108被限定在远端部98a、98b之间。如此,接收室94可以被认为是在接收室94的六侧中的三侧上是封闭的。接收室94在两个轴向端部处是敞开的,并且在径向地朝向空气间隙30的端部处是敞开的。接收室94在由指状部90a、90b形成的两个周向侧处是封闭的,并在基部110处是封闭的。
199.第一指状部90a和第二指状部90b的轮廓设置为将齿48架住并固持在固持腔内。保持部分100a、100b分别从远端部98a、98b并且相对于轴线a-a径向地且周向地延伸。保持部分100a、100b分别形成在指状部90a、90b的周向内壁上。每个保持部分100a、100b远离径向开口108周向地延伸,以使得接收室94的宽度随着该接收室94远离径向开口108延伸而增加。由此,远端部98a、98b突出超过接收室94的一部分。
200.保持部分100a、100b分别延伸到过渡部分104a、104b。过渡部分104a、104b分别是保持部分100a、100b与坐接部分102a、102b之间的拐点。坐接部分102a、102b从过渡部分104a、104b径向地且周向地延伸。坐接部分102a、102b周向地向内延伸并且朝向基部110会聚。如此,接收室94的宽度在过渡部分104a、104b和基部110之间变窄。坐接部分102a、102b分别包括坐接面112a、112b和基部面114a、114b。相应的基部面114a、114b朝向彼此延伸,以在基部110处相遇并且形成基部110。坐接面112a、112b可以是平面的。沿着坐接面112a的表面的平面横向于沿着保持部分100a的表面的平面,并且横向于沿着坐接面112b的表面的平面。沿着坐接面112a的表面的平面可以横向于或平行于沿着保持部分100b的表面的平面。
类似地,沿着坐接面112b的表面的平面横向于沿着保持部分100b的表面的平面,并且横向于沿着坐接面112a的表面的平面。沿着坐接面112b的表面的平面可以横向于或平行于沿着保持部分100a的表面的平面。
201.虽然接收室94从径向开口108到基部110径向地向内首先变宽并且然后变窄,但是保持件46的在外侧96a、96b之间的宽度从径向端部92到与分支42的接合部位增加。类似地,每个指状部90a、90b的宽度在远端部98a、98b与基部110之间增加。
202.图9a是沿图5b中的线9-9截取的磁通突出部44的放大剖视图。图9b是图9a所示的磁通突出部44的分解剖视图。将一起讨论图9a和图9b。磁通突出部44包括保持件46和齿48。保持件46包括保持件本体88和指状部90a、90b。保持件本体88包括外侧96a、96b。指状部90a、90b包括远端部98a、98b;保持部分100a、100b;坐接部分102a、102b;和过渡部分104a、104b。齿48包括第一部分68、第二部分70、间隙面72和轴向端部74a、74b。第一部分68包括接触面76和夹持面78a、78b。接触面76包括侧向表面80a、侧向表面80b和基部表面82。第二部分70包括轮廓部分84。
203.磁通突出部44包括由保持件46支撑的齿48。在一些示例中,保持件46由叠置的层压体形成,并且齿48由粉末金属形成。保持件46被构造成接合齿48并且将齿48夹持在接收室94内。更具体地,指状部90a、90b被构造为弹性爪,该弹性爪在齿48上施加朝向分支42的径向弹力,以将齿48坐接在接收室94内。指状部90a、90b与齿48对接,并且迫使齿48径向地进入基部110,以将齿48保持在适当位置并且维持齿48与保持件46之间的接触。
204.齿48的第一部分68设置在接收室94内,并且与保持件46的层压体叠置件直接对接。齿48被构造成尽可能多地直接接触保持件46的限定接收室94的部分,以最小化齿48与保持件46之间的间隙,并且有利于电磁通量的传递。磁通径向地流动通过磁通突出部44到轴向返回件28(在图3a中最佳看到)。磁通突出部44被构造成促进径向磁通流动通过保持件46到相关联的分支42的层压体(在图4a至4c中最佳看到)。
205.齿48的第一部分68包括齿的外部分116和齿的内部分118。间隙面72和夹持面78a、78b形成在齿的外部分116上。在所示示例中,齿的外部分116在与马达轴线a-a正交的平面中具有梯形的截面轮廓。在所示示例中,齿的内部分118具有在与马达轴线a-a正交的平面中截取的、三角形的截面轮廓,该轮廓具有由基部表面82形成的圆的基部特征。齿的内部分118可以被认为具有u形的截面轮廓。在所示示例中,齿的内部分118具有u形的截面轮廓,该u形的截面轮廓在u的腿部之间沿着齿48的高度并且朝向该齿的与间隙面72相反的端部在宽度方向上变窄。然而应当理解,并非所有示例都是如此构造的。
206.齿48的间隙面72设置在第一指状部90a的远端部98a与第二指状部90b的远端部98b之间。间隙面72通过接收室94的径向开口108而被暴露。间隙面72暴露于形成在定子14与转子12之间的空气间隙30(图1和图2a)。在一些示例中,间隙面72与远端部98a、98b成平面。如此,磁通突出部44的暴露于空气间隙30的径向端部可以由保持件46部分地形成以及由齿48部分地形成。
207.齿48分别在间隙面72处具有第一宽度tw1;在夹持面78a、78b与侧向表面80a、80b之间的接合部位处具有第二宽度tw2;并且在侧向表面80a、80b与基部表面82之间的接合部位附近具有第三宽度tw3。第一宽度tw1横跨间隙面72延伸,并且是齿48的朝向空气间隙30的最径向部分的宽度。随着夹持面78a、78b远离径向开口108周向地延伸,第二宽度tw2大于
第一宽度tw1。因为随着接触面76远离夹持面78a、78b延伸该接触面76变窄,所以第三宽度tw3比第二宽度tw2窄。在平面的侧向表面80a、80b过渡到弯曲的基部表面82的径向位置处示出第三宽度tw3。在所示示例中,第三宽度tw3比第二宽度tw2和第一宽度tw1两者窄。然而应当理解,在一些示例中,第三宽度tw3可以与第一宽度tw1相同或大于第一宽度tw1。
208.保持件46与齿48对接并且直接接触齿48,以将该齿48固持在接收室94中。保持件46包括外侧96a、96b,该外侧96a、96b分别包括第一表面120a、120b和第二表面122a、122。保持件46限定接收室94。接收室94的在径向开口108和过渡部分104a、104b之间延伸的外部分可以具有与轴线a-a正交的梯形的截面轮廓,以接收齿的外部分116的梯形的截面轮廓并且与该齿的外部分116的梯形的截面轮廓对接。接收室94的在过渡部分104a、104b和基部110之间的内部分可以具有与轴线a-a正交的截面轮廓,该截面轮廓是具有圆的尖端的三角形,以接收齿的内部分118并且与该齿的内部分118对接。接收室94的内部分可以被认为具有u形的截面轮廓。在所示示例中,接收室94的内部分具有u形的截面轮廓,该u形的截面轮廓在u的腿部之间沿着接收室94的高度从基部110朝向径向开口108变宽。
209.齿48和保持件46键接在一起,以使得齿48在该齿48的两个周向侧和该齿48的与径向开口108相反的径向端部与保持件46直接对接。
210.第一指状部90a在远端部98a和基部110之间径向地变宽。第一指状部90a在远端部98a处具有第一宽度fw1a。第一指状部90a在与过渡部分104a对齐的径向位置处具有第二宽度fw2a。第一指状部90a在外侧96a的第一表面120a与第二表面122a之间的接合部位附近具有第三宽度fw3a。第一指状部90a在坐接面112a与基部面114a之间的过渡的径向位置处具有第四宽度fw4a。第一指状部90a在基部110的径向位置附近具有第五宽度fw5a。第一宽度fw1a小于第二宽度fw2a,第二宽度fw2a小于第三宽度fw3a,第三宽度fw3a小于第四宽度fw4a,以及第四宽度fw4a小于第五宽度fw5a。
211.指状部90a在远端部98a与过渡部分104a的位置之间以第一速率变宽,以在第一宽度fw1a的位置与第二宽度fw2a的位置之间增加第一指状部90a的宽度。保持部分100a和第一表面120a各自相对于轴线a-a沿着与这些部分远离保持件46的径向端部92延伸相同的周向方向延伸。
212.第三宽度fw3a大于第二宽度fw2a和第一宽度fw1a两者。第三宽度fw3a取自外侧96a的第一表面120a与第二表面122a之间的接合部位附近的位置处。指状部90a在过渡部分104a的径向位置与第三宽度fw3a的径向位置之间以第二速率变宽。坐接部分102a和第一表面120a沿着与这些部分远离径向端92延伸相反的周向方向延伸。
213.第四宽度fw4a大于第三宽度fw3a、第二宽度fw2a和第一宽度fw1a中的每个。第四宽度fw4a取自坐接面112a与基部面114a之间的过渡的径向位置处。指状部90a在过渡部分104a的径向位置与第四宽度fw4a的径向位置之间以第三速率变宽。坐接部分102a和第一表面120a沿着与坐接部分102a和第二表面122a远离径向端部92延伸相反的周向方向延伸。
214.第五宽度fw5a大于第四宽度fw4a、第三宽度fw3a、第二宽度fw2a和第一宽度fw1a中的每个。第五宽度fw5a取自接收室94的基部110的径向位置附近。指状部90a在第四宽度fw4a的径向位置与第五宽度fw5a的径向位置之间以第四速率变宽。基部面114a和第二表面122a沿着这些部分远离径向端92径向地延伸相反的周向方向延伸。
215.指状部90a在远端部98a与该指状部90a的与保持件本体88的接合部位之间以各种
不同的速率变宽。第一速率可以是最慢的变宽速率。第二速率可以大于第一速率,以使得在具有第二速率的那些部分中比在具有第一速率的那些部分中,指状部90a的宽度沿着保持件46的径向高度的每单位距离增加得更多。第三速率可以小于第二速率。第三速率可以大于第一速率。第四速率可以大于第一速率、第二速率和第三速率中的任一个速率。
216.指状部90b被构造成类似于指状部90a,并且具有第一宽度fw1b、第二宽度fw2b、第三宽度fw3b、第四宽度fw4b和第五宽度fw5b。指状部90b的宽度取自与指状部90a的宽度相同的相对位置处,除了在外侧96b与指状部90b的限定接收室94的部分之间之外(例如,第三宽度fw3b取自第一表面120b与外侧96b的第二表面122b之间的接合部位附近)。指状部90b的宽度在远端部98b与基部110的径向位置之间径向地增加。虽然指状部90b类似于指状部90a,但是应当理解,指状部90b可以不同于指状部90a。在一些示例中,形成外侧96a的部分的斜率可以不同于形成外侧96b的部分的斜率。例如,磁通突出部44中的限定周向间隙66的终端磁通突出部可以不同于磁通突出部44中的其他磁通突出部,因为那些磁通突出部44沿周向延伸超过分支42。然而应当理解,所有磁通突出部44在径向端部92和基部110之间变宽。
217.形成在第一指状部90与第二指状部90之间的接收室94在保持件46的径向端部92处具有第一宽度rw1。接收室94在过渡部分104a、104b的径向位置处具有第二宽度rw2。接收室94在过渡部分104a、104b与基部110之间的径向位置处具有第三宽度rw3。第一宽度rw1在远端部98a、98b之间延伸,并且是在操作期间被暴露于空气间隙30的径向开口108的宽度。随着保持部分100a、100b远离径向开口108周向地延伸时,第二宽度rw2大于第一宽度rw1。随着接触面76沿着坐接部分102a、102b朝向分支42会聚,第三宽度rw3比第二宽度rw2窄。在坐接面112a、112b过渡到基部面114的径向位置处示出第三宽度rw3。在所示示例中,第三宽度rw3比第二宽度rw2和第一宽度rw1两者窄。
218.磁通突出部44的实际宽度是取自外侧96a、96b之间的宽度。磁通突出部44的层压体宽度是在分支42和保持件46的径向端部92之间的给定径向位置处磁通突出部44的由叠置的层压体形成的那些部分的组合宽度。层压体宽度不包括在给定径向位置处粉末金属的宽度。在一些径向位置处,磁通突出部44的实际宽度与磁通突出部44的层压体宽度相同。在其他径向位置(例如,在接收室94的径向开口108和基部110之间)处,磁通突出部44的实际宽度大于磁通突出部44的层压体宽度,这是因为磁通突出部44的那些部分包括粉末金属齿48。例如,层压体宽度是指状部90a和指状部90b在沿着包括接收室94的磁通突出部44的径向位置处的组合宽度,而这些位置处的实际宽度是保持件46在外侧96a和外侧96b之间的宽度。磁通突出部44的层压体宽度和实际宽度两者都从径向端部92朝向分支42增加。层压体宽度和实际宽度两者都可以在径向端92和分支42之间的所有径向位置处增加。在一些径向位置处,齿48的宽度大于磁通突出部44的层压体宽度。例如,沿着齿的外部分116的整个径向高度,齿的外部分116比磁通突出部44的层压体宽度宽。
219.在磁通突出部44的从径向开口108延伸到过渡部分104a、104b并且朝向分支42的部分中,层压体宽度、齿宽度和实际宽度中的每一者都增加。在磁通突出部分44的从过渡部分104a、104b朝向基部110的部分中,在齿宽减小的同时层压体宽度和实际宽度两者都增加。
220.齿48通过指状部90a、90b固定在接收室94内。在所示示例中,齿48在三个接触区中
与保持件46直接对接。第一接触区形成在指状部90a与齿48之间。更具体地,第一区形成在保持部分100a直接接触夹持面78a并且在齿48上施加具有朝向分支42的径向分量的力的位置。第二接触区形成在指状部90b与齿48之间。更具体地,第二区形成在保持部分100b直接接触夹持面78b并且在齿48上施加具有朝向分支42的径向分量的力的位置。夹持面78a设置在平面p1上,并且保持部分100a的表面设置在平面p2上。平面p1横向于平面p2设置,以使得夹持面78a和保持部分100的相对部分之间的接合部位的仅一部分包括保持件46与齿48之间的直接接触。夹持面78b和保持部分100b被构造成类似于夹持面78a和保持部分100a。
221.第三接触区形成在坐接部分102a、102b与接触面76之间。第三接触区设置在齿48的每个周向侧上,并且在两侧之间包裹齿48。在接触区中没有形成空气间隙,从而有利于通过磁通突出部44的有效磁通传递。
222.接收室94的第一宽度rwl(也是指状部90a、90b之间的距离)可以小于齿48的第一宽度twl。在一些示例中,齿48的第一宽度twl比接收室94的第一宽度rw1宽百分之一、百分之三或高达百分之五。宽度的差异有利于指状部90a、90b在齿48上施加弹力,以将齿48坐接在接收室94内。指状部90a、90b用作在齿48上施加力以将齿坐接在接收室94内的弹簧夹。每个指状部90a、90b施加具有径向分量和周向分量两者的力。周向分量可以抵消,以使得指状部90a、90b径向地驱动齿48进入接收室94并且远离空气间隙30,以最小化该齿48与保持件46之间的空气间隙。
223.齿48与保持件46之间的对接迫使齿向下进入接收室94中,以使得在第三接触区中以及在坐接部分102a、102b与接触面76之间形成直接接触。第一指状部90a和第二指状部90b形成弹性爪,该弹性爪在齿48上施加径向力以驱动在第三接触区内的接合。接收室94的弯曲部分的半径(例如,由基部面114a、114b限定的曲线的半径)可以略小于齿48的(由基部表面82形成的)弯曲部分的半径。接收室94比齿48小的半径提供了齿48与保持件46之间的紧密接触配合。指状部90a、90b的弹力向下推动齿48,以使间隙面72与该指状部90a、90b的远端部98a、98b径向地对齐。间隙面72直接地暴露于转子12与定子14之间的空气间隙30。
224.指状部90a、90b在该指状部90a、90b的远端部98a、98b附近收集磁通。在接收室94的周向侧上增加层压体宽度和指状部宽度为磁通流动通过磁通突出部44提供了附加区域,从而降低了这些区域中的磁通密度。远离径向端部92并朝向分支42扩展保持件46的宽度降低了磁通密度。从过渡部分104a、104b并朝向基部110减小齿的内部分118的宽度并且扩展层压体宽度进一步增强了磁通传递。降低的磁通密度促进了通过磁通突出部44的径向磁通流动,从而以轻重量、紧凑的方式提供有效操作。磁通突出部44不包括在齿的基部处沿周向变宽的齿。在一些示例中,齿48包括基部110附近的平滑、会聚的表面,并且不包括突然过渡。然而应当理解,齿48的实施例不一定如此构造。
225.第一齿间隙117a周向地设置在齿48与第一指状部90a之间,并且第二齿间隙117b周向地设置在齿48与第二指状部90b之间。第一齿间隙117a设置在第一接触区与第三接触区之间。第二齿间隙117b设置在第二接触区与第三接触区之间。在齿48与保持件46不直接接触的情况下的齿48与保持件46之间的间隙通常是不希望的,因为这样的间隙会抑制磁通流动。由齿的外部分116和指状部90a、90b的相邻部分所形成的磁通突出部44的径向部分收集径向地流动通过层压体并且朝向轴向返回件28流动的磁通。磁通突出部44的径向外端部富含径向地流动到该磁通突出部44的磁通。齿48与保持件46之间的对接被构造成使得第一
齿间隙117a和第二齿间隙117b分别周向地设置在磁通突出部44的富磁通区域中的保持部分100a、100b与夹持面78a、78b之间。在将齿48组装到保持件46之后,用灌封物(potting compound)填充该齿间隙117a、117b。在灌封期间保持件46维持该齿48的期望的位置和取向。
226.齿间隙117a、117b径向地设置成相比于接近基部110而言更接近空气间隙30。齿间隙117a、117a径向地设置在间隙面72和侧向表面80a、80b与夹持面78a、78b之间的接合部位之间。如此,齿间隙117a、117b径向地设置在齿48的最宽部分与远端部98a、98b之间。齿间隙117a、117b设置在磁通突出部44的富含磁通且具有高磁通密度的区域中。与低磁通密度区域中的间隙相比,将齿间隙117a、117b定位在该区域中使这些间隙的影响最小化。齿间隙117a、117b径向地设置在磁通突出部44的由齿的内部分118和指状部90a、90b的在周向上相邻部分所限定的径向部分的外部。由此,齿间隙117a、117b径向地设置在磁通突出部44的该部分的外部,在该部分中齿48周向地变窄并且每个指状部90a、90b具有沿每个周向方向延伸的壁。由变窄的齿48和对应的变宽的指状部90a、90b促使的层压体宽度的增加在马达操作期间提供了有效的磁通传递。
227.在磁通环24的组装期间,齿48可以轴向地插入到保持件46中。齿48压配合到接收室94中并且被指状部90a、90b固持。如图5d最佳看到的,在齿48安装到保持件46的情况下,齿48的每个轴向端部74a、74b可以突出到接收室94之外。齿48的轮廓与接收室94的轮廓对齐,并且齿48相对于轴线a-a轴向地偏移,以使得齿48通过接收室94的轴向开口106a、106b(图8)进入接收室94。例如,轴向端部74a可以与轴向开口106a对齐,以使得第一部分68是齿48的进入接收室94中并且与保持件46对接的第一部分。指状部90a、90b分别在夹持面78a、78b处在齿48上施加径向力,以将齿48坐接在接收室94内。将齿48轴向地插入到接收室94中可以迫使指状部90a、90b分开,以促使该指状部90a、90b在齿48上施加弹力以坐接该齿48。在一些示例中,可以通过在突出部86a、86b中的一个突出部处对齿48施加轴向力来插入齿48。指状部90a、90b与齿48之间的对接是压配合连接,该压配合连接具有高度的精度并且易于组装。通过制造过程的灌封步骤,指状部90a、90b将齿48相对于保持件46固持。
228.磁通突出部44提供显著的优点。指状部90a、90b将齿48固持在接收室94内。指状部90a、90b将齿48夹持到保持件46,以使得保持件46与齿48之间的齿间隙最小化,并且使得保留的任何齿间隙都设置在具有高磁通密度的有利位置处,从而不会抑制磁通流动。齿48与保持件46之间的接合部位有利于径向磁通流动通过磁通突出部44。指状部90a、90b用作弹性爪,该弹性爪将齿48在保持件46上牢固地保持就位。远离空气间隙30并且朝向分支42沿着磁通突出部44加宽层压体宽度和实际宽度减小了朝向分支42并远离空气间隙30的磁通密度。径向变宽有利于有效的磁通流动通过磁通突出部44,从而产生电磁场并且驱动转子12的旋转。齿48在接收室94内变窄,并且指状部90a、90b在每个周向方向上变宽,以平滑且快速地减小径向地远离永磁体阵列20的磁通密度并且促进径向磁通流动。
229.图10是相组件22a的侧视图。相组件22a的磁通环24a、24b和线圈26被示出为28。磁通环24a包括由保持件46a和齿48a形成的磁通突出部44a。磁通环24b包括磁通突出部组件22b,该磁通突出部组件22b具有由保持件46b和齿48b形成的磁通突出部44b。
230.如以上所讨论的,每个齿48a、48b的第二部分70在线圈26上轴向地延伸。齿48a、48b部分地横跨线圈26的轴向长度延伸。齿48a、48b不在线圈26的整个轴向长度上延伸,然
而应该理解,并非所有示例都被如此限制。渐缩的第二部分70具有渐缩的齿偏移距离od1、od2,该渐缩的齿偏移距离od1、od2在齿48a、48b周向地重叠的每个齿48a、48b的第二部分70的轴向长度上是均匀且恒定的。这种均匀且恒定的渐缩的齿偏移距离提供了更均匀的磁通量传递和减少的磁通泄露。
231.图11a是处于第一状态的具有灌封套筒128的定子14的第一等距视图。图11b是处于第二状态的具有灌封套筒128的定子14的第二等距视图。图11c是处于第二状态的具有灌封套筒128的定子14的第三等距视图,并且示出了插入件130。将一起讨论图11a至图11c。定子14包括相组件22、定子端部124a、124b和中心孔126。套筒128包括套筒内部132和套筒外部134。
232.相组件22沿着马达轴线a-a设置并且围绕该马达轴线a-a延伸。如以上所讨论的,相组件22被放置在相对于彼此的相对操作位置中,并且沿着马达轴线a-a排列。各个相组件22当处于它们的操作位置时围绕马达轴线a-a相对于彼此旋转偏移。
233.在相组件22处于相应的操作位置的情况下,将诸如环氧树脂等的灌封物添加到定子14。灌封物嵌入相组件22。灌封物将磁通环24嵌入在灌封物内。磁通环24的轴向侧完全嵌入灌封物中。如此,分支42和主干40中的每一者都完全嵌入在灌封物中。在一些示例中,线箍36完全嵌入在灌封物中。灌封物从定子12的圆柱形外周到定子12的圆柱形内周是连续的。在一些示例中,灌封物与马达轴线a-a连续(例如,在不包括插入件130的示例中)。
234.在灌封工艺期间使用套筒128和插入件130,以最小化所使用的灌封物,并且有利于定子14与转子12(图1和图2a)之间的空气间隙30(图1和图2a)的小尺寸。
235.套筒128是弹性的,并且具有小于定子14的直径d1的松弛直径(处于松弛状态的套筒128的直径)。例如,套筒128可以由弹性体等形成。套筒128最初处于卷起构型,其中套筒内部132面向外。将套筒128放置在定子端部124a上,并且沿着马达轴线a-a并在定子14的外部上轴向地展开。随着套筒128在定子14的外部上滚动,套筒128被外翻,以使得套筒内部132面向定子14并且该定子14对接,并且套筒外部134远离定子14。由于套筒128与定子14之间的不同直径,套筒内部132与定子14的外部直接对接。如此,套筒内部132与每个相组件22的磁通突出部44的径向端部直接对接。套筒内部132可以与齿48和保持件46中的一者或两者直接对接。套筒内部132可以与齿48的间隙面72直接对接。套筒128继续在定子14的长度上滚动,直到处于图11b和图11c所示的第二状态。在第二状态中,套筒128在定子端部124a、124b之间延伸并且径向地封围定子14。
236.插入件130设置在定子14的中心孔126中。插入件130被构造成与定子14的内侧对接,例如通过接触每个相组件22的磁通环24的环本体36的径向内侧。插入件130可以沿着马达轴线a-a轴向地插入到中心孔126中。插入件130可以是与定子14对接的塞。在一些示例中,插入件130可以被构造为囊状物,该囊状物填充有流体以径向地向外延伸该囊状物,从而填充中心孔126并且接触定子14。
237.定子14被套筒128和插入件130径向地架住。套筒128和插入件130形成用于灌封工艺的罐。可以将灌封物施加到套筒128与插入件130之间的定子14。如以上所讨论的,一些示例不包括插入件130,以使得套筒128形成用于灌封工艺的罐。
238.套筒128与定子14之间的在直径方面的差异促使套筒128的部分在设置在磁通突出部44之间的间隙中径向地向内收缩。由此在固化的灌封物的外径向表面中形成凹坑136
(图12a和图12b)。凹坑136可以形成在磁通突出部44中的相邻的磁通突出部之间的间隔间隙52(在图4a至图4c中最佳看到)中,形成在同一磁通环24的齿48之间沿周向形成在磁通突出部44中的相邻的磁通突出部之间的周向间隙66a、66b(在图4a至图4c中最佳看到)中,以及形成在磁通突出部44中的磁通成对的磁通突出部的齿48之间沿周向设置的间隙中。
239.凹坑136是在灌封工艺期间形成的,而不是在灌封物固化之后通过机加工形成的。如此,凹坑136可以不规则地形成在定子12的空气间隙表面(其是定子12的暴露于空气间隙30的表面)中。凹坑136可以具有不规则的深度,可以形成在齿48的一些齿对之间而不形成在齿48的其他齿对之间,可以形成在齿48的不同的齿对之间的不同位置处,等。套筒128的弹性致使凹坑136的不规则性。
240.套筒128与定子14之间的在直径方面的差异促使套筒128与齿48的间隙面72之间的直接接触。如此,从齿48的间隙面72和由套筒128部分地形成的罐之间去除间隙。套筒128由此可以防止灌封物在间隙面72上固化,以使得间隙面72直接暴露于定子14与转子12之间的空气间隙30。如此,粉末金属部件(例如,齿48)可以直接暴露于空气间隙30。一个或多个齿48的间隙面72可以直接暴露于空气间隙30,而无需对齿48机加工去除灌封物。应当理解,齿48中的一些齿可以在间隙面72上具有无关紧要的灌封物的层,这可能在套筒128与齿48之间存在泄漏。
241.去除定子14与罐之间的径向间隙防止了灌封物在间隙面72上固化,并且防止了灌封物径向地向外延伸超过齿48。不需要对定子14机加工去除灌封物以暴露齿48。防止灌封物径向地延伸超过齿48允许永磁体阵列20更接近定子14,而无需担心灌封物与转子12之间的接触。如此,可以减小空气间隙30的径向尺寸,从而提高马达效率,并且提供电机10的更紧凑的布置。
242.图12a是示出定子14的一部分和凹坑136的放大端视图。图12b是示出凹坑136的定子14的局部侧视图。将一起讨论图12a和图12b。示出了定子14的相组件22a-22c(图12b)。示出了磁通环24a(图12a)的环本体36(图12a)、主干40(图12a)、分支42(图12a)和磁通突出部44。磁通突出部44包括保持件46和齿48。示出了齿48的间隙面72。
243.由于在齿48之间的灌封物中形成凹坑136,因此定子14的外部表面是不规则的和有轮廓的。凹坑136形成在定子12的在操作期间暴露于空气间隙30的表面中。在所示示例中,凹坑136形成在定子14的径向外部处。凹坑136远离磁通突出部44的径向端部径向地延伸。如此,直接在灌封工艺完成之后,磁通突出部44可以形成定子14的径向最外(或在其他示例中为最内)部分。更具体地,齿48的被暴露的间隙面72形成定子14的径向最外部分。如图12b最佳看到的,凹坑136可以在同一磁通环24的齿48之间沿周向形成在磁通突出部44中的相邻的磁通突出部之间的间隙中,形成在磁通突出部44中的磁通成对的磁通突出部的齿48之间的周向地设置的间隙中,以及形成在相邻的相组件22之间的轴向间隙中(例如,图6c中所示的在磁通突出部44b与磁通突出部44c之间沿着轴线a-a)。
244.凹坑136减少了在灌封工艺期间所使用的灌封物的量,从而节省了成本和材料。凹坑136还提供了定子14的暴露于空气间隙30的可变表面。凹坑136由此减轻了电机10的重量。另外,凹坑136提供了可以收集进入定子14与转子之间的空气间隙30的任何碎屑的位置。凹坑136可以收集和捕获进入空气间隙30的污染物,从而防止这些污染物干扰转子12。与光滑的周向表面不同,碎屑可以收集在凹坑136中,并且由此从空气间隙30去除,从而防
止由碎屑引起的潜在接触损坏。凹坑136提供了定子14的在操作期间暴露于空气间隙30的空气间隙表面的变化。如此,定子14与转子12之间的机械空气间隙30的尺寸变化。机械空气间隙30的尺寸的变化使得电机10不易于在转子12与定子14之间的对接处损坏。
245.如图所示,凹坑136不规则地形成在定子12的暴露于空气间隙30的空气间隙表面中。凹坑136可以具有不规则的深度,一些凹坑136可以形成在相邻的齿48之间的第一区域中,而其他凹坑136可以形成在与齿48的其他相邻齿对之间的第一区域不同的区域中。在一些示例中,凹坑136可以形成在齿48的一些齿对之间,而凹坑136不形成在齿48的其他齿对之间。因此,凹坑轮廓可以在齿48的不同的齿对之间变化。
246.图13是定子14的立体端视图,示出了定子14的空气间隙表面中的凹坑136。定子14嵌入在灌封物146中。灌封物146嵌入定子14中,以使得磁通环24的轴向侧完全嵌入在灌封物146内。齿48的部分(例如,间隙面72)和保持件46的部分(例如,每个指状部90a、90b的远端部98a、98b)从灌封物146暴露到形成在定子14与转子12之间的空气间隙30。如图所示,灌封物146可以将定子14的整个径向范围延伸到其上安装有定子14的毂148。
247.凹坑136形成在齿48之间。凹坑136在灌封工艺期间形成。凹坑136不规则地形成在定子14的空气间隙表面上。凹坑136的轮廓可以相对于凹坑136中的其他凹坑变化。如图所示,定子14的空气间隙表面在定子端部124b附近具有相对平滑的轮廓,并且在定子端部124a附近具有更多限定的凹坑136。凹坑136被形成为使得定子14具有暴露于空气间隙30的不规则的且有轮廓的表面。凹坑136可以在齿48之间轴向地延伸并且在齿48之间周向地延伸。
248.凹坑136还提供了定子14的暴露于空气间隙30的可变表面。凹坑136由此减轻了电机10的重量。另外,凹坑136提供了可以收集进入定子14与转子12之间的空气间隙30的任何碎屑的位置。在凹坑136中捕获污染物防止这些污染物对转子12的操作产生不利影响。
249.图14a是磁通环24'和插入件130'的一部分的端视图。图14b是类似于图14a的端视图,示出了在灌封物已经固化并且插入件130'被移除之后的磁通环24'。磁通环24'包括环本体36'、主干40'、分支42'和磁通突出部44'。
250.在所示示例中,磁通环24'用于内转子马达中的定子,其中转子径向地设置在定子14'内。如此,环本体36'形成磁通环24'的相对于转子的旋转轴线的径向外部分。主干40'从环本体36'径向地向内延伸。分支42'由主干40'支撑。磁通突出部44'从分支42'径向地向内延伸。在所示示例中,磁通突出部44'是层压体零部件,但应当理解,磁通突出部44'的一些示例包括粉末金属部件,例如齿48(在图7a至图7e中最佳看到)。周向间隙66'类似于间隙66a、66b(在图4a至图4c中最佳看到)并且在分支之间径向地延伸。间隔间隙52'类似于间隙52(在图4a至图4c中最佳看到)并在磁通突出部44中的相邻的磁通突出部之间周向地延伸。
251.插入件130'形成在灌封工艺期间所使用的罐的径向内部分。类似于套筒128(图11a至图11c)的套筒可以围绕定子的外部设置以形成罐的外部分。在一些示例中,因为磁通环24'用于内转子马达,所以定子的径向外侧不暴露于机械空气间隙,因此刚性外套筒、金属管或其他容器可以用于磁通环24'的定子的径向外侧。插入件130'可以是弹性的并且延伸穿过定子的中心孔。插入件130'被插入定子中,并且径向地向外膨胀到磁通突出部44'之间的周向间隙66'和间隔间隙52'中。例如,插入件130可以是被构造成填充有流体的囊状物,或者可以是压缩组件等。如图14b所示,凹坑136形成在磁通突出部44之间的灌封物中。
252.凹坑136在定子的空气间隙表面中形成变化。如图所示,凹坑136不规则地形成在定子12的暴露于空气间隙的空气间隙表面中。凹坑136可以具有不规则的深度,一些凹坑136可以形成在相邻的齿48之间的第一区域中,而其他凹坑136可以形成在与齿48中的其他相邻齿对之间的第一区域不同的区域中。在一些示例中,凹坑136可以形成在齿48的一些齿对之间,而凹坑136不形成在齿48的其他齿对之间。凹坑轮廓因此可以在齿48的不同的齿对之间变化。凹坑136减少了内转子马达的重量和马达的材料成本。此外,凹坑136提供了可以收集进入定子与转子之间的空气间隙(类似于空气间隙30(图1和图2a))的任何碎屑的位置。机械空气间隙的尺寸的变化使得马达不易于在转子与定子之间的对接处损坏。
253.图15是内转子马达的定子14'内的插入件130”的示意图。定子14'包括相组件22a'、相组件22b'和相组件22c'。插入件130”与插入件130'(图14a)基本上类似,并且被构造成接触每个相组件22a'-22c'中的磁通突出部44'(图14a和图14b),以使得在灌封物中形成凹坑136。
254.膨胀组件138延伸穿过插入件130”的内部。膨胀组件138包括延伸部140、板142和调节器144。膨胀组件138延伸穿过插入件130”,并且被构造成促使插入件130”径向地膨胀以接触相组件22a'-22c'。板142设置在定子14'的相反轴向端部上。延伸部140延伸穿过插入件130”,并且以能够操作的方式连接到板142。例如,延伸部140可以是延伸穿过插入件130”和穿过板142的杆。可以是连接到延伸部140的螺纹端部的螺母的调节器144被用于使板142轴向地移动更靠近在一起,从而在插入件130”上提供压缩力。压缩力促使插入件130”在定子14'内径向地膨胀以与相组件22a'-22c'对接。
255.虽然已经参考(一个或多个)示例性实施例描述了本发明,但是本领域技术人员将理解,在不远离本发明范围的情况下,可以进行各种不同的改变并且可以用等效物代替其元件。此外,在不远离本发明范围的情况下,可以进行许多修改以使特定情况或材料适应于本发明的教导。因此,旨在本发明不限于所公开的(一个或多个)特定实施例,而是本发明将包括落入所附权利要求的范围内的所有实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1