一种伺服电机动态参数适配方法与流程
1.本发明涉及伺服驱动器技术领域,具体涉及一种伺服电机动态参数适配方法。
背景技术:
2.伺服驱动器被广泛应用于工业机器人及数控加工中心等自动化设备中,属于设备的最核心部件,直接制约了设备的总体性能。
3.目前市面上主流的伺服驱动器都适配了专用的电机,伺服电机作为一套系统存在。用户在使用过程中不需要关注电机相关的参数和编码器配置,仅需要关注应用的参数,调整整体系统到最佳状态即可。
4.现有技术的主要问题:
5.1、大多伺服驱动器对电机的内参和编码器配置都进行了隐藏,在伺服驱动器内部进行了设置,或者在出厂的时候根据用户需要,进行设置;
6.2、伺服驱动器本身的性能不足,导致开放参数后,自定义电机的性能下降明显,甚至无法良好使用;
7.3、从根本上只能配套自家的电机,不支持其他的电机。
技术实现要素:
8.本发明的目的在于克服现有技术的不足,提供一种伺服电机动态参数适配方法,主要针对直线电机,动态增加伺服驱动参数的计算方法和参数适配。
9.本发明的技术方案如下:
10.一种伺服电机动态参数适配方法,该方法基于在伺服驱动器内置一自定义电机拓展系统,包括以下步骤:
11.s1、伺服驱动器启动;
12.s2、通过自定义电机拓展系统从eeprom中读取适配伺服电机所设定的参数;
13.s3、进入初始化;
14.s4、对适配伺服电机的各个参数进行有效性检查;
15.s5、检查通过后根据算法计算参数;
16.s6、设置伺服驱动器运行时参数;
17.s7、伺服驱动器正常运行。
18.步骤s4中,若检查有不通过的,则立刻报错,需要修正参数,重新启动伺服驱动器。
19.步骤s5中,所述参数包括编码器参数、电流参数和增益参数。
20.其中,所述电流参数根据适配伺服电机的相关参数设置程序算法计算得到。
21.其中,所述增益参数根据数字化伺服控制算法计算得到。
22.其中,所述增益参数包括增益参数k1、增益参数k2和增益参数k3。
23.所述增益参数k1的计算公式如下:
24.k1=laδω
re
δi
1a
/δνa;
25.所述增益参数k2的计算公式如下:
26.k2=φ
fa
δω
re
/δνa;
27.所述增益参数k3的计算公式如下:
28.k3=k
iq
δi
1a
/δνa;
29.其中,la是伺服电机的相电感,δω
re
是电气角速度的量子化分辨率,δi
1a
是三相电流的量子化分辨率,δνa是一次电压指令量子换分辨率的1.732倍,φ
fa
是伺服电机的感应电压常数,k
iq
和控制系统的剪切角频率ωc满足如下关系:
[0030][0031]
其中,r是电阻。
[0032]
相对于现有技术,本发明的有益效果在于:本发明通过在伺服驱动器内置一自定义电机拓展系统,该系统支持用户根据现有的电机参数,动态的对伺服驱动器进行配置,使其能快速适应用户的多种应用场景,可以让用户尽可能的利用现有的设备与伺服驱动器进行高性能结合,达到快速、有效、高效、低成本的实施现场方案。
附图说明
[0033]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0034]
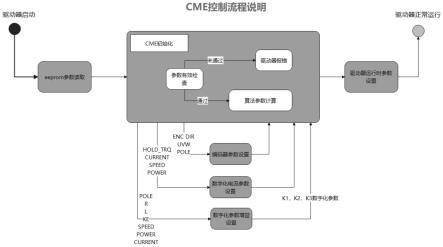
图1为本发明的方法流程示意图。
具体实施方式
[0035]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0036]
为了说明本发明所述的技术方案,下面通过具体实施例来进行说明。
[0037]
实施例
[0038]
本实施例提供一种伺服电机动态参数适配方法,该方法通过在伺服驱动器内置一自定义电机拓展系统(cme),其支持用户根据现有的电机参数,动态的对伺服驱动器进行配置,使其能快速适应用户的多种应用场景,可以让用户尽可能的利用现有的设备与伺服驱动器进行高性能结合。当伺服驱动器需要使用cme的功能时,需要在软件上将其配置成cme模式,这时伺服驱动器在初始化阶段会执行cme系统的逻辑。如图1所示,伺服驱动器启动后,首先通过自定义电机拓展系统从eeprom中读取适配伺服电机所设定的参数;然后进行cme初始化;接着对适配伺服电机的各个参数进行有效性检查,若检查有不通过的,则立刻报错,需要修正参数,重新启动伺服驱动器,检查通过后需要对参数进行三方面的处理,其一是编码器参数的设置,其二是根据外部适配电机的相关参数设置程序算法的电流参数,其三是计算数字化伺服控制算法的增益参数k1、增益参数k2和增益参数k3;最后设置伺服
驱动器运行时参数,伺服驱动器即可正常运行。
[0039]
增益参数k1的计算公式如下:
[0040]
k1=laδω
re
δi
1a
/δνa;
[0041]
增益参数k2的计算公式如下:
[0042]
k2=φ
fa
δω
re
/δνa;
[0043]
增益参数k3的计算公式如下:
[0044]
k3=k
iq
δi
1a
/δνa;
[0045]
其中,la是伺服电机的相电感,δω
re
是电气角速度的量子化分辨率,δi
1a
是三相电流的量子化分辨率,δνa是一次电压指令量子换分辨率的1.732倍,φ
fa
是伺服电机的感应电压常数,k
iq
和控制系统的剪切角频率ωc满足如下关系:
[0046][0047]
其中,r是电阻。
[0048]
尝试驱动新电机时,必须在驱动器中输入该电机的cme参数。在这种情况下,必须提前准备要驱动的电机的规格/信息。将根据这些信息输入cme参数。
[0049]
下表列出了所需的电机信息和相应的cme参数。
[0050]
cme相关的long参数:
[0051][0052][0053]
cme相关的参数:
[0054]
[0055][0056]
设置示例1:750w等效电机,带uvw传感器。
[0057]
假定电机信息如下表(左)所示。此信息将cme参数显示在下表(右)中。在cme参数设置屏幕中输入它们。
[0058]
[0059][0060]
设置示例2:直线电机
[0061]
电机信息见下表(左侧)。前两个参数(电机的n-n距离和编码器的分辨率)必须转换成编码器每转一圈的脉冲数。
[0062]
假设电机的n-n距离(n)=50mm,编码器的分辨率(ε)=2.0μm。
[0063]
由于可以设置的极数是4,6,8,将一圈的极数确定为4(p)。使用下面的公式计算每转的脉冲数。
[0064][0065]
编码器的脉冲数为50000[脉冲/旋转]。
[0066]
将电机的最大速度设定为4[m/s]。编码器的分辨率=2μm,换算后为4
×
10 6/2=2
×
106[pulse/sec]=40[rev/sec]=2400[rpm],并指定24。
[0067]
驱动程序可以输入的最大脉冲速度为6144[kpulse/sec]。驱动程序的最大速度为6.144x10 6脉冲/秒/50000脉冲/旋转x60秒=约7300rpm。
[0068]
如果电机的最大速度(现在是2400rpm)超过驱动器的最大速度,请将驱动器的最大速度指定为7300rpm(参数值73)。
[0069]
如上所述,在cme设置画面中设置的参数值如下表(右侧)所示。
[0070][0071]
以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1