一种分段式永磁直线同步电机的无传感器控制方法与流程
本发明涉及直线电机,尤其涉及一种分段式永磁直线同步电机的无传感器控制方法。
背景技术:
1、由于无人机直线电机助推发射系统具有较长行程的特点,目前多采用初级分段式永磁直线同步电机。永磁直线同步电机需要实时检测电机动子的位置,以实现交轴和直轴电流的解耦,从而作为重要控制量。由于该类电机长行程的特点,加装常规的皮带位置传感器经常出现脱齿的情况,进而造成位置测量不准,导致推力损失;又由于该类电机应用于特殊工况,使得位置传感器容易受外界电磁辐射等环境因素的影响,而无法达到精度要求甚至不能正常工作,从而降低了系统的可靠性。
2、初级分段直线电机的每段定子之间绕组不连续,使得段间区域电磁参数会随着动子和定子间的耦合面积变化呈现非周期性的变化,从而增加了无传感器位置及速度估算的难度;同时,分段电机两段定子绕组的电流需同步控制,动子位置估算的准确性将影响电机在过渡区域的运行性能;并且,由于位置估算非常依赖电机电流波形质量,电流质量差会导致位置估算不准,从而进一步降低电机电流质量,该问题在动子与相邻定子之间切换运行时尤为突出。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种分段式永磁直线同步电机的无传感器控制方法,用以解决现有电流质量差会导致位置估算不准,从而降低电机电流质量的问题。
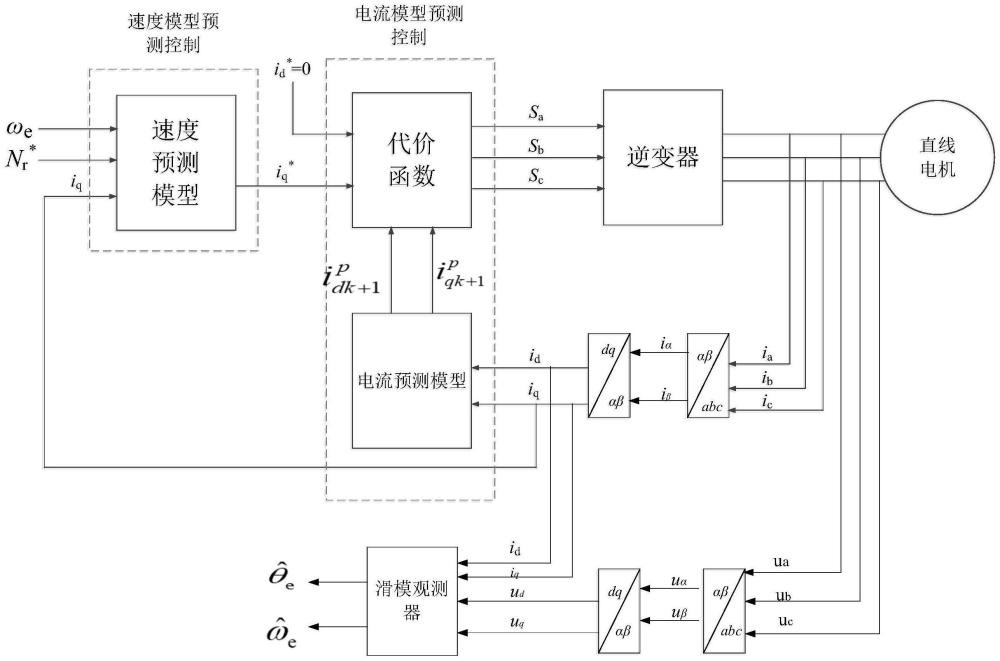
2、一方面,本发明实施例提供了一种分段式永磁直线同步电机的无传感器控制方法,具体包括:
3、分别获取所述直线同步电机在dq坐标系下的电压和电流;
4、在动子助推过程中,基于获取的所述dq坐标系下的电流,采用电流模型预测控制算法预测下一时刻的dq轴电流值;
5、基于获取的所述dq坐标系下的电压和电流解算得到电机电角度;
6、在动子匀速返回过程中,基于获取的所述dq坐标系下的电流和所述电机电角度,采用速度预测模型算法作为外环、电流模型预测控制算法作为内环,使动子快速回位;
7、在动子助推及匀速返回过程中,分别基于预测的所述dq轴电流值得到开关量以控制所述同步电机;
8、其中,电流模型预测控制算法在电机定子离散模型中引入动子运动过程中相应位置定子的反电动势及出力系数k获得。
9、进一步地,所述动子运动过程中相应位置定子的反电动势及出力系数k为动子和所述相应位置定子重叠长度与动子长度的比值,其中,0≤k≤1。
10、进一步地,采用两个逆变器为所述分段式永磁直线同步电机的定子进行供电控制;
11、若逆变器1为定子供电,且动子在该定子长度范围内运动,则该定子的反电动势及出力系数为k1=1,其余定子的反电动势及出力系数为k2=0;
12、若逆变器2为定子供电,且动子在该定子长度范围内运动,则此时该定子的反电动势及出力系数为k2=1,其余不供电定子的反电动势及出力系数为k1=0;
13、若动子运动到由逆变器1和逆变器2分别供电的定子1和定子2之间,此时由两个定子共同供电,则两个供电定子的反电动势及出力系数分别为k2=1-k1;
14、其中,l为第一个供电的定子的长度,lm为动子的长度,x为以动子的初端为基准动子沿该第一个供电的定子移动的位移。
15、进一步地,所述基于获取的所述dq坐标系下的电压和电流解算得到电机电角度,包括:
16、基于获取的所述dq坐标系下的电压和电流采用滑模观测器算法得到扩展反电动势估算值;
17、基于所述扩展反电动势估算值,采用锁相环解算得到电机电角度。
18、进一步地,所述采用滑模观测器算法得到扩展反电动势估算值,包括:基于电机电压方程,得到关于扩展反电动势的电流状态方程;基于所述电流状态方程根据滑模观测器计算方程,得到扩展反电动势的估算值;其中,
19、所述电机电压方程为:
20、
21、其中,rs为定子电阻,ld为定子电感ls的d轴分量、lq为定子电感ls的q轴分量,ωe为动子角速度,p为微分算子,为定子电流,为扩展反电动势;
22、得到的关于扩展电动势的电流状态方程为:
23、其中,
24、所述滑模观测器计算方程为:
25、
26、其中,为定子电流的观测值,vα、vβ为反电动势的估算值;
27、根据滑模观测器算法中的等效控制原理,所述扩展反电动势与反电动势估算值[vα vβ]在dq轴电压和电流下的计算值等效,基于所述等效得到所述扩展反电动势估算值,具体为:
28、
29、其中,为计算得到的扩展反电动势的估算值,k为系数,为电流观测误差。
30、进一步地,所述采用锁相环解算电机电角度,具体包括:
31、
32、为估算的电机电角度,为扩展反电动势估算值eα、eβ经过低通滤波器得到的扩展反电动势的估算值,为积分算子,kp为锁相环的比例系数,ki为锁相环的积分系数。
33、进一步地,所述分别获取所述直线同步电机在dq坐标系下的电压和电流,包括:
34、获取直线电机的三相交流电流ia、ib、ic,经过clark和park变换为id和iq;
35、获取直线电机的直流电源电压udc,经过clark和park变换为ud、uq。
36、进一步地,所述动子助推过程包括:
37、基于所述电流预测算法在电机定子离散模型中引入动子运动过程中相应位置定子的反电动势及出力系数k,根据电流模型预测控制算法,预测未来k+1时刻的dq轴定子的电流预测值。
38、进一步地,所述动子匀速返回过程包括:
39、基于给定的基准转速结合获得的dq坐标系下的电压和电流,以及动子的角速度ωe,经过速度预测模型算法预测得到动子的位置以及电流在dq坐标系下的基准值iq*;
40、根据电流模型预测控制算法,基于第k个采样时刻得到的dq轴定子电流值预测任意输入电压作用下未来k+1时刻的dq轴定子电流预测值。
41、进一步地,所述基于第k个采样时刻得到的dq轴定子电流值预测任意输入电压作用下未来k+1时刻的dq轴定子电流预测值,包括:
42、根据所述直线电机在dq坐标系下的电压和电流,基于所述电机定子电压状态方程,以及定子产生的反电动势及出力系数的不同,得到电流模型预测控制算法预测的下一时刻dq轴的电流值方程为:
43、
44、是表征反电动势的量,ts为采样周期,ωe为动子角速度,ψf为动子永磁体磁链,lq为定子电感ls的dq轴分量,i(k)表示第k个采样时刻状态变量i的值;右上角p代表预测值,预测值用于判断电流误差;所述k根据供电逆变器确定为k1或k2。
45、另一方面,与现有技术相比,本发明至少可实现如下有益效果之一:
46、1、通过在电流模型预测控制算法中引入动子运动过程中相应位置定子的反电动势及出力系数k,进而提高了电流预测的准确性,从而使动子在相邻两段定子间跨段运行时推力波动降低约30%,并提高了无传感器控制策略位置估算的准确性,使得估算角度误差控制在10°以内,有助于系统快速并稳定地实现加速助推和匀速返回过程,提高了系统的动态性能。
47、2、基于获取的所述dq坐标系下的电流,采用电流模型预测控制算法预测下一时刻的dq轴电流值,使电流误差减小,从而通过误差最小来选取开关量,从而控制逆变器各个开关管(sa、sb、sc)的通断情况,最终达到控制直线电机进行工作,保证无人机系统能够快速并稳定地完成全发射过程。
48、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!