双输入双输出阻尼控制器构建方法、阻尼控制器及装置与流程
本技术涉及低频振荡抑制,尤其涉及双输入双输出阻尼控制器构建方法、阻尼控制器及装置。
背景技术:
1、随着风力发电逐渐替代传统火电机组成为主力发电机组,电力系统惯性常数极具下降,随之带来的系统频率稳定问题需得到重视。事实上,风电机组转子的惯性常数与火电机组类似,其具备支撑电力系统频率的能力。然而,由于风电机组的转子与电网解耦,其不能像火电机组一样对系统出现频率跌落问题进行响应。因此,可通过设计附加频率响应控制器使风电机组参与电网频率响应。
2、频率响应控制器输入为风机通过锁相环测量得到的并网点频率。当电网频率波动时,频率响应控制器可通过改变风机有功功率来参与电网调频。研究发现风电经锁相环测量电网频率后会有产生低频振荡的风险。
3、目前,现有研究通过单独设计单输入单输出阻尼控制器来抑制风机参与调频引入的新的低频振荡。单输入单输出阻尼控制器选取频率偏差为输入,用于阻尼控制的有用功率为输出来抑制低频振荡。现有阻尼控制器设计时忽略了运用锁相环测量风机并网点频率产生低频振荡的影响。
技术实现思路
1、鉴于此,本技术实施例提供了双输入双输出阻尼控制器构建方法、阻尼控制器及装置,以消除或改善现有技术中存在的一个或更多个缺陷。
2、本技术的第一个方面提供了一种双输入双输出阻尼控制器构建方法,包括:
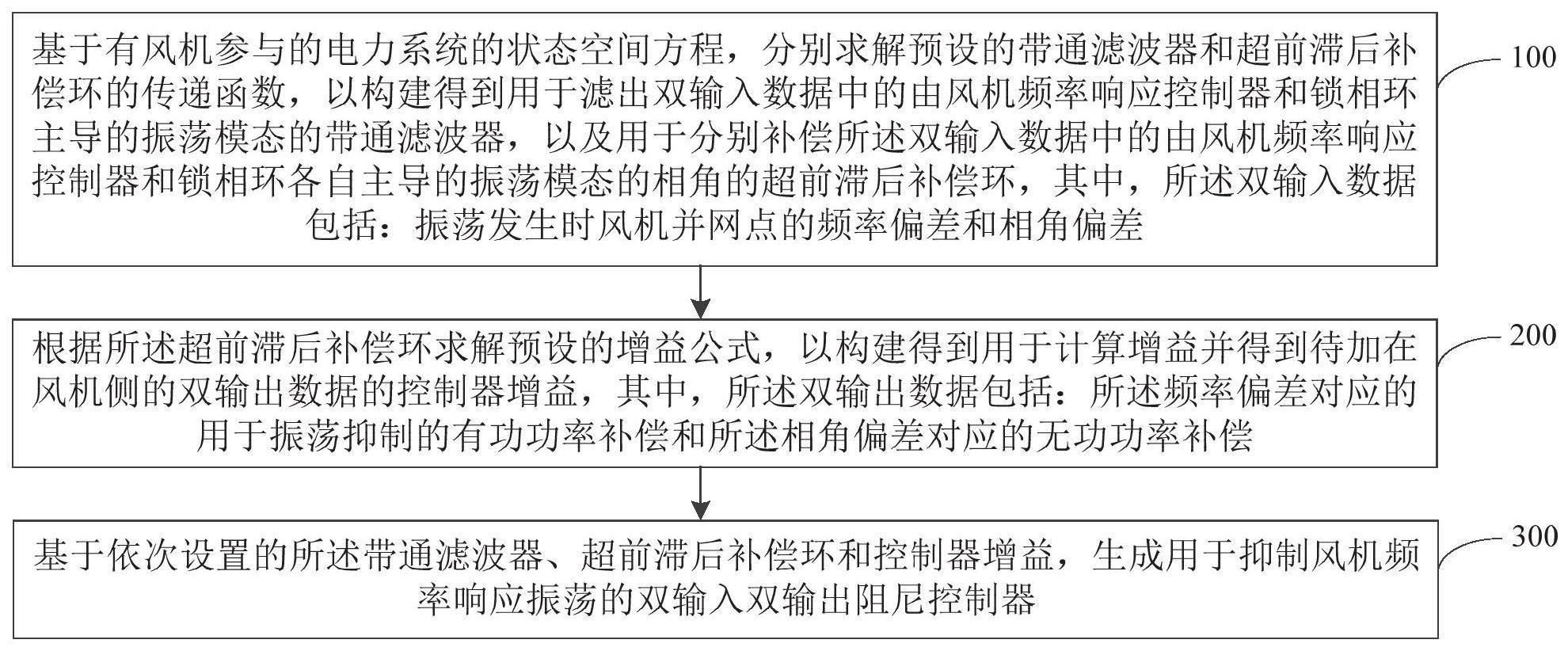
3、基于有风机参与的电力系统的状态空间方程,分别求解预设的带通滤波器和超前滞后补偿环的传递函数,以构建得到用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器,以及用于分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环,其中,所述双输入数据包括:振荡发生时风机并网点的频率偏差和相角偏差;
4、根据所述超前滞后补偿环求解预设的增益公式,以构建得到用于计算增益并得到待加在风机侧的双输出数据的控制器增益,其中,所述双输出数据包括:所述频率偏差对应的用于振荡抑制的有功功率补偿和所述相角偏差对应的无功功率补偿;
5、基于依次设置的所述带通滤波器、超前滞后补偿环和控制器增益,生成用于抑制风机频率响应振荡的双输入双输出阻尼控制器。
6、在本技术的一些实施例中,所述基于有风机参与的电力系统的状态空间方程,分别求解预设的带通滤波器和超前滞后补偿环的传递函数,以构建得到用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器,以及用于分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环,包括:
7、以振荡发生时风机并网点的电网频率和相角作为输出,构建有风机参与的电力系统的状态空间方程;
8、基于有风机参与的电力系统的状态空间方程求解预设的带通滤波器的传递函数,以构建用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器;
9、根据所述状态空间方程确定所述风机频率响应控制器和锁相环各自主导的振荡模态的留数,以采用该留数分别确定所述风机频率响应控制器和锁相环各自对应的时间常数,并基于该时间常数求解预设的超前滞后补偿环的传递函数,以构建用于分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环。
10、在本技术的一些实施例中,所述以振荡发生时风机并网点的电网频率和相角作为输出,构建有风机参与的电力系统的状态空间方程,包括:
11、建立有风机参与的电力系统对应的系统调频模型;
12、将所述系统调频模型上的一运行点对应的有功功率点和无功功率点作为输入,并将振荡发生时风机并网点的电网频率和相角作为输出进行线性化处理,以得到所述电力系统的状态空间方程。
13、在本技术的一些实施例中,所述基于有风机参与的电力系统的状态空间方程求解预设的带通滤波器的传递函数,以构建用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器,包括:
14、根据所述状态空间方程中的状态空间矩阵,确定所述电力系统中用于反映低频震荡模态的各个特征根,并获取各个所述特征根分别对应的频率和阻尼比;
15、自各个所述特征根中查找由风机频率响应控制器和锁相环分别主导的低频振荡模态的特征根作为目标特征根;
16、基于各个所述目标特征根各自对应的频率和阻尼比,分别求解预设的带通滤波器的传递函数,以得到用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器。
17、在本技术的一些实施例中,所述根据所述状态空间方程确定所述风机频率响应控制器和锁相环各自主导的振荡模态的留数,以采用该留数分别确定所述风机频率响应控制器和锁相环各自对应的时间常数,并基于该时间常数求解预设的超前滞后补偿环的传递函数,以构建用于分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环,包括:
18、根据所述状态空间矩阵中的输入矩阵和直接传递矩阵,确定所述目标特征根对应的左特征向量和右特征向量;
19、基于所述左特征向量和右特征向量,以及所述状态空间矩阵中的输入矩阵和输出矩阵,分别确定所述风机频率响应控制器和锁相环各自主导的振荡模态的留数;
20、基于所述风机频率响应控制器和锁相环各自主导的振荡模态的留数,以及预设的所述风机频率相应控制器的振荡模态对应的留数的权重因子和所述锁相环的振荡模态对应的留数的权重因子,确定对应的超前滞后环节相移;
21、根据所述超前滞后环节相移确定第一时间常数和第二时间常数的比例;
22、基于所述第一时间常数和第二时间常数的比例,以及所述风机频率响应控制器和锁相环分别各自对应的目标特征根的频率,分别确定所述风机频率响应控制器对应的第一时间常数和第二时间常数,以及所述锁相环对应的第一时间常数和第二时间常数;
23、应用所述风机频率响应控制器和所述锁相环分别对应的所述第一时间常数和第二时间常数,分别求解预设的超前滞后补偿环的传递函数,以得到用于分别补偿双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环。
24、在本技术的一些实施例中,所述根据所述超前滞后补偿环求解预设的增益公式,以构建得到用于计算增益并得到待加在风机侧的双输出数据的控制器增益,包括:
25、根据预设的所述电力系统对低频振荡最低阻尼比的要求数据,确定符合阻尼比要求的理想特征根位置;
26、基于所述理想特征根位置、所述目标特征根、所述超前滞后补偿环、所述风机频率响应控制器和锁相环各自主导的振荡模态的留数、以及预设的所述风机频率相应控制器的振荡模态对应的留数的权重因子和所述锁相环的振荡模态对应的留数的权重因子,求解预设的增益公式,以构建得到用于计算增益并输出待加在风机侧的用于振荡抑制的有功功率补偿和无功功率补偿的控制器增益。
27、本技术的第二个方面提供了一种双输入双输出阻尼控制器,包括:依次连接的带通滤波器、超前滞后补偿环和控制器增益;
28、所述带通滤波器,用于基于对应的传递函数滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态,其中,所述双输入数据包括:振荡发生时风机并网点的频率偏差和相角偏差;
29、所述超前滞后补偿环,用于基于对应的传递函数分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角;
30、所述控制器增益,用于基于增益公式计算增益并得到待加在风机侧的双输出数据,其中,所述双输出数据包括:所述频率偏差对应的用于振荡抑制的有功功率补偿和所述相角偏差对应的无功功率补偿。
31、本技术的第三个方面提供了一种双输入双输出阻尼控制器构建装置,包括:
32、第一构建模块,用于基于有风机参与的电力系统的状态空间方程,分别求解预设的带通滤波器和超前滞后补偿环的传递函数,以构建得到用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器,以及用于分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环,其中,所述双输入数据包括:振荡发生时风机并网点的频率偏差和相角偏差;
33、第二构建模块,用于根据所述超前滞后补偿环求解预设的增益公式,以构建得到用于计算增益并得到待加在风机侧的双输出数据的控制器增益,其中,所述双输出数据包括:所述频率偏差对应的用于振荡抑制的有功功率补偿和所述相角偏差对应的无功功率补偿;
34、控制器生成模块,用于基于依次设置的所述带通滤波器、超前滞后补偿环和控制器增益,生成用于抑制风机频率响应振荡的双输入双输出阻尼控制器。
35、本技术的第四个方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的双输入双输出阻尼控制器构建方法。
36、本技术的第五个方面提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现所述的双输入双输出阻尼控制器构建方法。
37、本技术提供的双输入双输出阻尼控制器构建方法,通过基于有风机参与的电力系统的状态空间方程,分别求解预设的带通滤波器和超前滞后补偿环的传递函数,以构建得到用于滤出双输入数据中的由风机频率响应控制器和锁相环主导的振荡模态的带通滤波器,以及用于分别补偿所述双输入数据中的由风机频率响应控制器和锁相环各自主导的振荡模态的相角的超前滞后补偿环,其中,所述双输入数据包括:振荡发生时风机并网点的频率偏差和相角偏差;根据所述超前滞后补偿环求解预设的增益公式,以构建得到用于计算增益并得到待加在风机侧的双输出数据的控制器增益,其中,所述双输出数据包括:所述频率偏差对应的用于振荡抑制的有功功率补偿和所述相角偏差对应的无功功率补偿;充分考虑风机参与电网调频时频率响应控制器和锁相环对系统稳定性的影响,能够有效抑制系统在频率跌落时可能出现的低频振荡,在风机连接弱电网时也能构保证电力系统的运行稳定性和可靠性。
38、本技术的附加优点、目的,以及特征将在下面的描述中将部分地加以阐述,且将对于本领域普通技术人员在研究下文后部分地变得明显,或者可以根据本技术的实践而获知。本技术的目的和其它优点可以通过在说明书以及附图中具体指出的结构实现到并获得。
39、本领域技术人员将会理解的是,能够用本技术实现的目的和优点不限于以上具体所述,并且根据以下详细说明将更清楚地理解本技术能够实现的上述和其他目的。
- 还没有人留言评论。精彩留言会获得点赞!