一种基于负载检测的智能预充控制电路的制作方法
1.本实用新型属于预充电技术领域,具体是涉及一种基于负载检测的智能预充控制电路。
背景技术:
2.随着新能源技术的发展和应用推广,隧道施工工程车辆中,用以运输土方、管片和相关工具与材料的牵引电机车也越来越多在使用锂电池动力系统,用以替代原铅酸电瓶动力系统或超级电容动力系统。隧道牵引电机车在使用铅酸电瓶或超级电容动力系统时,为稳定动力电压通常在负载端并联安装有超大容量的电解电容,以45吨规格的牵引电机车为例,负载电容通常会采用20只6800uf的电解电容进行串并联,使负载端的电容量高达34000uf。当采用锂电池动力系统时,尤其是采用锂电池动力系统替代原原铅酸电瓶或超级电容动力系统时,如果没有合理的预充控制设计,在动力系统上电的瞬间,由于超大容量的负载电容短路效应,将在锂电池动力系统的母线主接触器触点上形成高达数千安培甚至上万安培的峰值合闸电流,这将使锂电池动力系统的主触点烧毁,使隧道牵引电机车失去动力并不能再次启动,从而会严重影响车辆正常运行以及工程进度。
3.同时,这类隧道施工工程车辆在运行中,因驾驶人员的操作习惯问题,可能存在先上电,后合闸(用户侧断路器qf)的情况。在这种情况下,用户合闸前,预充电路会极快完成,主接触器安全闭合,因用户侧断路器未闭合,负载电容未接入,因此,这将形成假预充,等用户合闸时,因负载电容的投入形成的短路效应,将不可避免损坏主接触器。因此,预充电路应有负载接入检测,当负载未接入时,不应执行预充,动力系统不上电,以保证系统安全。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型的目的在于提出一种由预充电阻网络、预充电感网络、负载检测网络共同构成的可检测负载状况的智能预充控制电路。
5.为了实现上述目的,本实用新型的技术方案如下:
6.一种基于负载检测的智能预充控制电路,包含:
7.锂电池组bats、电池管理系统bms、预充电阻网络、预充电感网络、负载检测网络、接触器km1~km2、母线电流传感器ct、启动输入信号st以及动力母线连接器xs1~xs2;
8.其中,所述预充电阻网络包含预充电阻r及与预充电阻r相连接的预充接触器km3;所述预充电感网络包含预充电感l及与预充电感l相连接的预充接触器km4;所述负载检测网络包含绝缘检测仪imd及其检测信号线by0~by2,所述预充电阻网络与预充电感网络均分别并联在接触器km1两端;所述检测信号线by0与接触器km2的前端相连接,检测信号线by1、检测信号线by2分别与接触器km1的前端和后端相连接;所述绝缘检测仪imd与电池管理系统bms通过can线相连接并进行数据交互;所述母线电流传感器ct与启动输入信号st均与电池管理系统bms相连接;所述动力母线连接器xs1与接触器km1后端相连接,所述动力母线连接器xs2与接触器km2后端相连接;所述接触器km1~km4均由电池管理系统bms根据软
件策略进行控制连接。
9.进一步的,在所述动力母线连接器xs1与动力母线连接器xs2之间连接有并联的电容器c、负载rl。
10.更进一步的,在所述动力母线连接器xs1与电容器c之间设有断路器qf。
11.本实用新型的有益效果:
12.本实用新型的智能预充控制电路具有预充速度快、零合闸电流及无负载不启动的特点和优点,可以有效解决市场上普通的预充电路普遍存在的预充速度慢、合闸电流大及不能应对假预充、不能兼容用户侧可能存在二级预充问题。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
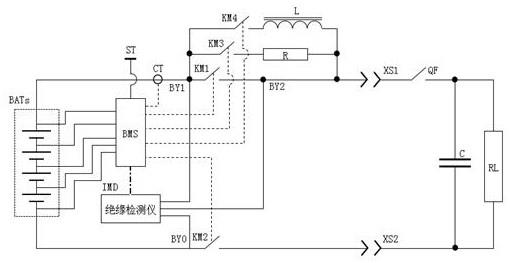
14.图1是实施例1控制电路的电路图。
具体实施方式
15.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
16.实施例1
17.本实施例1提出了一种基于负载检测的智能预充控制电路,如图1所示,包含:
18.锂电池组bats、电池管理系统bms、预充电阻网络、预充电感网络、负载检测网络、接触器km1~km2、母线电流传感器ct、动力母线连接器xs1~xs2以及启动输入信号st,其中,预充电阻网络包含预充电阻r及与预充电阻r相连接的预充接触器km3;预充电感网络包含预充电感l及与预充电感l相连接的预充接触器km4;负载检测网络包含绝缘检测仪imd及其检测信号线by0~by2,预充电阻网络与预充电感网络均分别并联在接触器km1两端。
19.本实施例中,检测信号线by0与接触器km2的前端相连接,检测信号线by1、检测信号线by2分别与接触器km1的前端和后端相连接;绝缘检测仪imd与电池管理系统bms通过can线相连接并进行数据交互,接触器km1~km4均由电池管理系统bms根据软件策略进行控制,母线电流传感器ct与启动输入信号st均与电池管理系统bms相连接。
20.动力母线连接器xs1与接触器km1后端相连接,动力母线连接器xs2与接触器km2后端相连接,在动力母线连接器xs1与动力母线连接器xs2之间连接有并联的电容器c、负载rl,且在动力母线连接器xs1与电容器c之间设有断路器qf。
21.基于上述,结合图1所示,本实施例的智能预充控制电路的控制方法,包括有以下步骤:
22.当用户通过启动输入信号st启动系统时,电池管理系统bms完成自检及系统检测后,闭合接触器km2,并闭合预充接触器km3,电池管理系统bms分别采集并分析母线电流和接触器km1的前后端电压。
23.当电流传感器ct的值为0且电阻预充网络的预充完成的时间小于1秒(此值可根据调试进行调整),则说明动力母线连接器xs1~xs2后端未连接负载,或负载未接通,此时,系统停止启动,并发出告警提示。
24.当电流传感器ct的值不为0且电阻预充网络的预充完成的时间大于1秒(此值可根据调试进行调整)且不大于rc*ln(vbats/
△
v)时,则判定负载连接良好,继续预充,并在电阻预充网络完成后,闭合预充接触器km4,开启电感预充网络,当负载检测网络检测到接触器km1的后端电压与其前端电压的差值不大于1v时,判定预充成功,此时闭合主接触器km1,并依次断开接触器km3、km4,完成系统的正常启动。
25.当电流传感器ct的值不为0且电阻预充网络的预充完成的时间大于rc*ln(vbats/
△
v)的125%时(此值可根据调试进行调整),则判定负载连接异常或负载端有不匹配的预充同时存在,此时,系统停止启动,并发出告警提示。
26.在本实用新型的描述中,需要说明的是,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“顶部”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。另外还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电路连接;可以是直接相连,也可以是通过中间媒介间接相连。对于本领域的普通技术人员而言,可视具体情况理解上述术语在本实用新型中的具体含义。
27.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1