本发明属于混合动力汽车能量管理,具体涉及基于驾驶行为的车速预测方法、装置、设备及存储介质。
背景技术:
1、能量管理策略通过协调动力需求在多种能源之间的分配方式,能在不牺牲动力需求的前提下提升整车的燃油经济性和排放性能,在混合动力汽车的控制中具有举足轻重的地位。模型预测控制策略通过进行局部的车速预测及优化控制,既考虑了未来的行程信息,又极大地缩短了优化的时间,有助于实现能量管理策略的在线应用。
2、对未来工况的预测是模型预测控制策略的一个主要组成部分,真实驾驶场景下驾驶员的驾驶行为随着时间不断地在变化,而车速的变化与驾驶员行为息息相关。传统的模型训练方法为基于整体历史驾驶数据或按照工况分类进行离线训练,忽略了驾驶员的行为对车速的影响,使用该方法预测的车速与驾驶员实际行为所对应的车速存在一定偏差。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了基于驾驶行为的车速预测方法、装置、设备及存储介质,其目的在于提高车速预测的准确性。
2、为了解决上述技术问题,本发明通过以下技术方案予以实现:
3、一种基于驾驶行为的车速预测方法,包括:
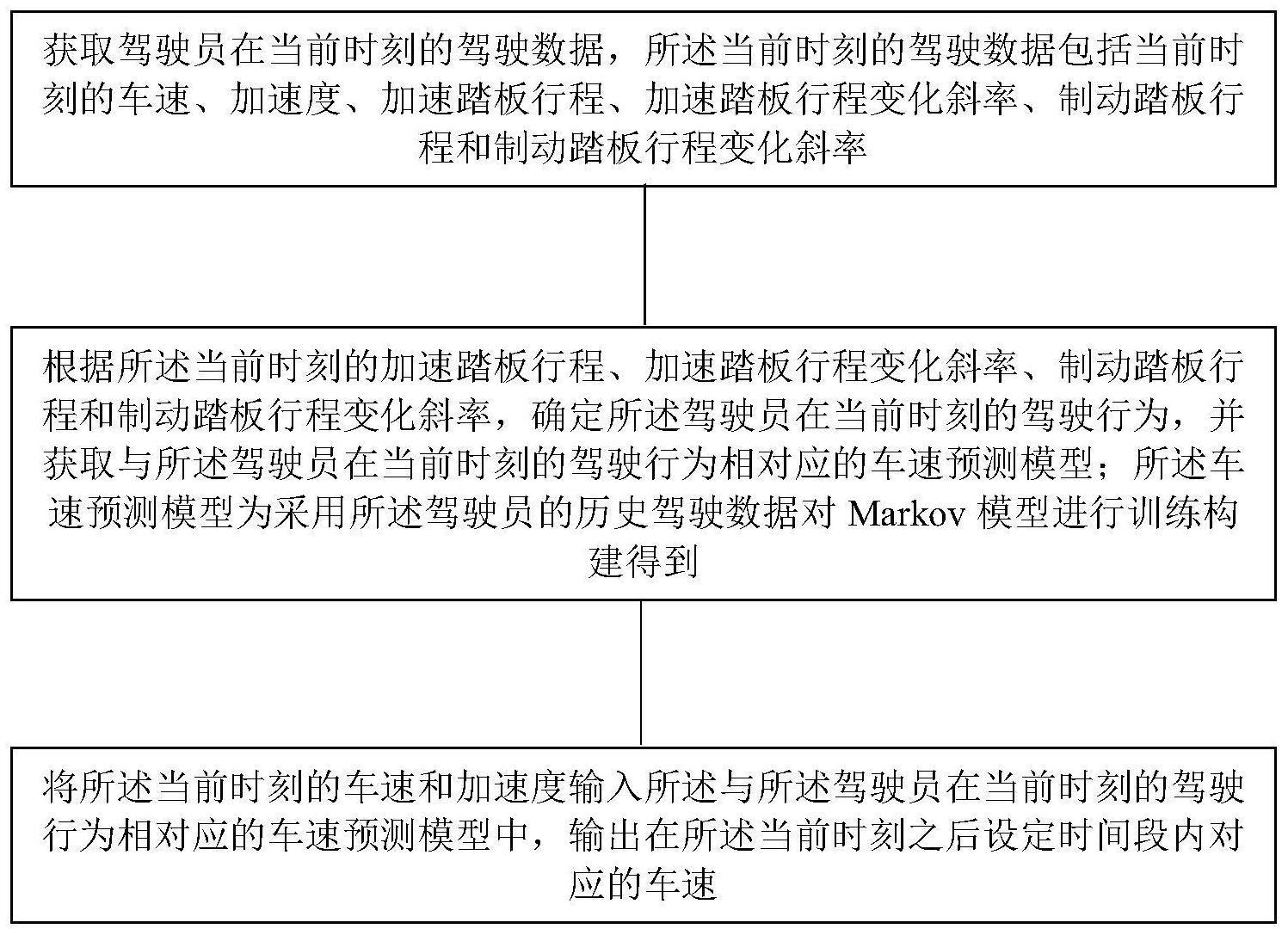
4、获取驾驶员在当前时刻的驾驶数据,所述当前时刻的驾驶数据包括当前时刻的车速、加速度、加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率;
5、根据所述当前时刻的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,确定所述驾驶员在当前时刻的驾驶行为,并获取与所述驾驶员在当前时刻的驾驶行为相对应的车速预测模型;所述车速预测模型为采用所述驾驶员的历史驾驶数据对markov模型进行训练构建得到;
6、将所述当前时刻的车速和加速度输入所述与所述驾驶员在当前时刻的驾驶行为相对应的车速预测模型中,输出在所述当前时刻之后设定时间段内对应的车速。
7、进一步地,所述采用所述驾驶员的历史驾驶数据对markov模型进行训练构建车速预测模型,包括:
8、获取所述驾驶员的历史驾驶数据,所述历史驾驶数据包括历史驾驶时间以及所述历史驾驶时间对应的车速、加速度、加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率;
9、根据所述历史驾驶时间以及所述历史驾驶时间对应的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,确定所述驾驶员在所述历史驾驶时间对应的驾驶行为,所述驾驶行为包括加速行为和制动行为;
10、根据所述历史驾驶时间对应的驾驶行为,将所述历史驾驶时间以及所述历史驾驶时间对应的车速和加速度划分到所述历史驾驶时间对应的驾驶行为中,得到不同驾驶行为对应的训练数据集;
11、根据所述不同驾驶行为对应的训练数据集对markov模型进行训练,得到不同驾驶行为对应的车速预测模型。
12、进一步地,所述markov模型包括状态空间、状态转移频数矩阵、状态转移频率矩阵和车速预测公式;
13、所述状态空间包括加速度序列as0和速度序列vs0;其中,所述加速度序列as0为长度为la的amin到amax的等间距序列,la为离散加速度状态数,amin为预设的最小加速度阈值,amax为预设的最大加速度阈值;所述速度序列vs0为长度为lv的0到vmax的等间距序列,lv为离散速度状态数,vmax为预设的最大速度阈值;
14、所述状态转移频数矩阵采用最邻近法则对训练数据集中的连续变量进行处理并统计每个状态转移发生的次数,表示如下:
15、
16、其中,v(k)、a(k)和a(k+m)为训练数据集中的连续变量值,vn、ai和aj为采用最邻近法则后上述连续变量值对应在状态空间中的离散变量值,k以时间间隔δt=1遍历训练数据集,lp为预设的预测步长;
17、所述状态转移频率矩阵依据统计的所述状态转移频数矩阵得到,表示如下:
18、
19、所述车速预测公式采用期望预测法,表示如下:
20、
21、其中,ae(m)为预测的第m预测步长的期望加速度,ajj和分别为第m预测步长的加速度状态及对应的概率。
22、进一步地,所述根据所述历史驾驶时间以及所述历史驾驶时间对应的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,确定所述驾驶员在所述历史驾驶时间对应的驾驶行为,具体为:
23、基于模糊逻辑,根据所述历史驾驶时间以及所述历史驾驶时间对应的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,得到所述驾驶员在所述历史驾驶时间对应的驾驶行为。
24、进一步地,所述加速行为包括紧急加速行为、一般加速行为和缓慢加速行为;
25、在加速行为的前提下,当获取的加速度大于预设的最大加速度时的行为定义为所述紧急加速行为,当获取的加速度小于预设的最小加速度时的行为定义为所述缓慢加速行为,当获取的加速度不大于所述预设的最大加速度且不小于所述预设的最小加速度时的行为定义为一般加速行为。
26、进一步地,所述制动行为包括紧急制动行为、一般制动行为和缓慢制动行为;
27、在制动行为的前提下,当获取的加速度的绝对值大于预设的最大加速度的绝对值时的行为定义为所述紧急制动行为,当获取的加速度的绝对值小于预设的最小加速度的绝对值时的行为定义为所述缓慢制动行为,当获取的加速度的绝对值不大于所述预设的最大加速度的绝对值且不小于所述预设的最小加速度的绝对值时的行为定义为一般加速行为。
28、进一步地,所述根据所述当前时刻的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,确定所述驾驶员在当前时刻的驾驶行为,具体为:
29、基于模糊逻辑,根据所述当前时刻的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,得到所述驾驶员在当前时刻的驾驶行为。
30、一种基于驾驶行为的车速预测装置,包括:
31、驾驶数据获取模块,用于获取驾驶员在当前时刻的驾驶数据,所述当前时刻的驾驶数据包括当前时刻的车速、加速度、加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率;
32、车速预测模型获取模块,用于根据所述当前时刻的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,确定所述驾驶员在当前时刻的驾驶行为,并获取与所述驾驶员在当前时刻的驾驶行为相对应的车速预测模型;所述车速预测模型为采用所述驾驶员的历史驾驶数据对markov模型进行训练构建得到;
33、预测车速输出模块,用于将所述当前时刻的车速和加速度输入所述与所述驾驶员在当前时刻的驾驶行为相对应的车速预测模型中,输出在所述当前时刻之后设定时间段内对应的车速。
34、一种设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的一种基于驾驶行为的车速预测方法的步骤。
35、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述的一种基于驾驶行为的车速预测方法的步骤。
36、与现有技术相比,本发明至少具有以下有益效果:
37、本发明提供的一种基于驾驶行为的车速预测方法,获取驾驶员在当前时刻的驾驶数据,当前时刻的驾驶数据包括当前时刻的车速、加速度、加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率;根据当前时刻的加速踏板行程、加速踏板行程变化斜率、制动踏板行程和制动踏板行程变化斜率,确定驾驶员在当前时刻的驾驶行为,并获取与驾驶员在当前时刻的驾驶行为相对应的车速预测模型;车速预测模型为采用驾驶员的历史驾驶数据对markov模型进行训练构建得到;将当前时刻的车速和加速度输入与驾驶员在当前时刻的驾驶行为相对应的车速预测模型中,输出在当前时刻之后设定时间段内对应的车速。也就是说,通过预先对驾驶员的历史驾驶数据按驾驶行为进行分类,再按照分类后的驾驶行为对应的训练数据分别训练markov模型,得到多个不同驾驶行为对应的车速预测模型,实际使用过程中通过驾驶员的当前时刻操作对驾驶行为进行识别,再调用该驾驶行为对应的车速预测模型进行车速预测,通过上述方式预测的车速能更接近驾驶员实际行为所对应的车速,达成提升车速预测精度的目的。
38、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。