一种直线电机编码器在磁场缺失情况下的位置检测方法与流程
本发明属于直线电机驱动的环形路径运输,尤其涉及一种直线电机编码器在磁场缺失情况下的位置检测方法。
背景技术:
1、由直线电机驱动的环形路径运输系统广泛应用于物流、食品、机械等行业,随着这些行业的发展,对环形路径上运输工件的定位精度也提出了更高的要求。
2、专利cn201911242449.8中一种交叉带环形路径分拣系统,公开了传统的工件定位的方案,通过包括若干辆分拣小车、环形输送轨道、plc和光电传感器的交叉带环形路径分拣系统,其中光电传感器与plc电连接,将该光电传感器设置在环形输送轨道上以检测分拣小车的移动位置,光电传感器来检测分拣小车的位置,从而实现对小车上运输工件的位置检测,该方法虽然定位简单,但是定位精度差,特别是在高速运行过程中定位容易出现偏差,造成误检以及漏检,为了防止这样的情况发生,只能够让环形路径缓慢运行,但是这样会影响环形路径的运行效率,使运输时间被延长。
3、专利cn201922382786.9中一种叉车轮胎输送系统,公开了基于扫码器的视觉定位的方案,相比于光电传感器,基于扫码器的视觉定位方案在一定程度上提高了环形路径工件的定位精度和可靠性,其主要包括控制系统、转运物流车、装车扫码器、抓取扫码器、机械手和输送装置,输送装置包括依次对接的地面辊道线、上升输送机、空中辊道线和下降输送机,该方案通过扫码器来扫描物流车上的整车码的方式进行工件位置检测,但是该方案的装配成本较高,且会使得环形路径装置的复杂性提升,造成维护与更换的成本变高。
4、同时环形路径工件定位系统与直线传输的不同点在于环形路径结构的限制,会导致其在转弯处出现缺磁铁的情况,进而导致数据缺失,无法判断直线电机定子和动子的相对位置,造成定位不准确的情况发生。因此需要一种方案来解决上述问题。
5、需要说明的是,上述内容属于发明人的技术认知范畴,并不必然构成现有技术。
技术实现思路
1、为了解决上述问题,本发明的目的是提供一种在环形路径转弯处缺少磁铁导致编码器数据缺失时,根据缺少的磁铁的极性以及数量,设置对应数量的开关霍尔传感器,通过特定算法完成数据补偿,达到对环形路径上各个工件的精确定位的检测的方法。
2、为实现上述目的,本发明提出了一种直线电机编码器在磁场缺失情况下的位置检测方法,其特征在于,包括以下步骤:
3、s1:在电机次级上交替布置s极磁铁和n极磁铁,形成一条直线磁铁阵列,相邻s极磁铁和n极磁铁中心之间的距离为τ/2;
4、s2:在直线编码器上,沿环形路径运动方向布置若干开关霍尔传感器形成阵列,单个阵列的长度为s=τ,任意相邻的两个开关霍尔传感器之间的距离为τ/n,定位分辨率δ=τ/2n;
5、s3:通过测量开关霍尔传感器所在位置的磁感应强度的矢量方向,可以得到传感器输出的高低电平;
6、s4:开关霍尔传感器在空间上呈120°电气角度排列在直线电机编码器上,按照一个极距的三分之一排列,三个开关霍尔传感器的输出相位相差120°,占空比为50%;
7、s5:三个开关霍尔传感器为一组,三个开关霍尔传感器输出三个霍尔信号,可以将一个电周期划分为六个区间,每个区间60°;
8、s6:每个开关霍尔传感器会产生开关信号,处理芯片采集信号后记录其变化,高电平为1,低电平为0,将每个扇区根据高低电平编码,信号处理芯片通过读取编码器数据即可知道次级所处的电角度区间,从而实现了对环形路径的位置检测;
9、s7:位于环形路径转弯处出现磁铁不连续,导致信号处理芯片无法获取到完整的编码信息,无法实现对环形路径的位置检测时,需要对现有数据进行合成,得到完整数据后,再使用信号处理芯片读取编码信息,最终确定环形路径的位置。
10、在一个示例中,步骤s1中,τ是直线磁铁阵列形成的周期性空间磁场的极距,初级位于直线磁铁阵列产生的磁场中。
11、在一个示例中,步骤s2中,n为开关霍尔传感器阵列中包含传感器的数量,将单个阵列上的霍尔元件沿着运行方向按照编号1、2、3…依次排列。
12、在一个示例中,步骤s3中,输出的高电平以及低电平根据所使用的开关霍尔传感器的型号不同而变化。
13、在一个示例中,步骤s5中,被划分的电周期区间为霍尔扇区,三个开关霍尔传感器1、2、3的输出信号分别作为信号a、b、c依次排列输入给信号处理芯片。
14、在一个示例中,步骤s7中,当环形路径内缺失n块磁铁时,需要n+1组开关霍尔传感器进行数据补偿。
15、在一个示例中,在环形路径内缺失磁铁的情况下,需要判断缺失的极性以及数目。
16、在一个示例中,在磁铁缺失情况下,数据补偿方法如下:
17、①缺失s极磁铁
18、开关霍尔传感器为s型时:
19、缺失1块磁铁,则需要2组开关霍尔传感器,第一组开关霍尔传感器编号依次为1、2、3,第二组开关霍尔传感器编号依次为4,5,6,开关霍尔传感器4的数据滞后开关霍尔传感器1的时间与直线电机运行两块磁铁距离所需的时间相等,将开关霍尔传感器1与开关霍尔传感器4的数据相或,合成后的数据作为信号a输出,同理将开关霍尔传感器2和开关霍尔传感器5的数据相或合成后作为信号b输出,开关霍尔传感器3和开关霍尔传感器6的数据相或合成后作为信号c输出;
20、开关霍尔传感器为n型时:
21、缺失1块磁铁,则需要2组开关霍尔传感器,第一组开关霍尔传感器编号依次为1、2、3,第二组开关霍尔传感器编号依次为4,5,6,开关霍尔传感器4的数据滞后开关霍尔传感器1的时间与直线电机运行两块磁铁距离所需的时间相等,将开关霍尔传感器1与开关霍尔传感器4的数据相与,合成后的数据作为信号a输出,同理将开关霍尔传感器2和开关霍尔传感器5的数据相与合成后作为信号b输出,开关霍尔传感器3和开关霍尔传感器6的数据相与合成后作为信号c输出;
22、②缺失n极磁铁
23、开关霍尔传感器为s型时:
24、缺失1块磁铁,则需要2组开关霍尔传感器,第一组开关霍尔传感器编号依次为1、2、3,第二组开关霍尔传感器编号依次为4,5,6,开关霍尔传感器4的数据滞后开关霍尔传感器1的时间与直线电机运行两块磁铁距离所需的时间相等,将开关霍尔传感器1与开关霍尔传感器4的数据相与,合成后的数据作为信号a输出,同理将开关霍尔传感器2和开关霍尔传感器5的数据相与合成后作为信号b输出,开关霍尔传感器3和开关霍尔传感器6的数据相与合成后作为信号c输出;
25、开关霍尔传感器为n型时:
26、缺失1块磁铁,则需要2组开关霍尔传感器,第一组开关霍尔传感器编号依次为1、2、3,第二组开关霍尔传感器编号依次为4,5,6,开关霍尔传感器4的数据滞后开关霍尔传感器1的时间与直线电机运行两块磁铁距离所需的时间相等,将开关霍尔传感器1与开关霍尔传感器4的数据相或,合成后的数据作为信号a输出,同理将开关霍尔传感器2和开关霍尔传感器5的数据相或合成后作为信号b输出,开关霍尔传感器3和开关霍尔传感器6的数据相或合成后作为信号c输出;
27、③缺失snx极磁铁且缺失的磁铁为相邻磁铁(表示在直线电机在运行过程中,依次缺s极磁铁和n极磁铁,x为正整数,表示缺sn极磁铁重复的次数)
28、开关霍尔传感器为s型或n型处理方式相同:
29、当x=1时,为缺失2块磁铁,则需要3组开关霍传感器,第一组开关霍尔传感器编号依次为1、2、3,第二组开关霍尔传感器编号依次为4,5,6,第三组开关霍尔传感器编号依次为7,8,9,需要对每个时序对应的开关霍尔传感器1、4、7的高低电平值首尾相连,形成一个环形,对相邻数据进行相与,然后对所有数据进行相或处理,通过这样的方式对开关霍尔传感器1、4、7的数据合成后作为信号a输出;同理将开关霍尔传感器2、5、8的数据合成后作为信号b输出,开关霍尔传感器3、6、9的数据合成后作为信号c输出;
30、当x=2时,为缺少4块磁铁,则需要5组开关霍尔传感器,同样将开关霍尔传感器1、4、7、10、13每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、7、10、13的数据合成后作为信号a输出,将开关霍尔传感器2、5、8、11、14的数据合成后作为信号b输出,将开关霍尔传感器3、6、9、12、15的数据合成后作为信号c输出;
31、当x=n时,表示缺n块磁铁,则需要n+1组开关霍尔传感器;即开关霍尔传感器1、4、……、3n+1每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与n/2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、……、3n+1的数据合成后作为信号a输出,开关霍尔传感器2、5、……、3n+2的数据合成后作为信号b输出,将开关霍尔传感器3、6、……、3n+3的数据合成后作为信号c输出;
32、④缺失nsx极磁铁且缺失的磁铁为相邻磁铁(表示在直线电机在运行过程中,依次缺n极和s极,x为正整数,表示缺ns极磁铁重复的次数)
33、开关霍尔传感器为s型或n型处理方式相同:
34、当x=1时,为缺失2块磁铁,则需要3组开关霍传感器,第一组开关霍尔传感器编号依次为1、2、3,第二组开关霍尔传感器编号依次为4,5,6,第三组开关霍尔传感器编号依次为7,8,9,需要对每个时序对应的开关霍尔传感器1、4、7的高低电平值首尾相连,形成一个环形,对相邻数据进行相与,然后对所有数据进行相或处理,通过这样的方式对开关霍尔传感器1、4、7的数据合成后作为信号a输出;同理将开关霍尔传感器2、5、8的数据合成后作为信号b输出,开关霍尔传感器3、6、9的数据合成后作为信号c输出;
35、当x=2时,为缺少4块磁铁,则需要5组开关霍尔传感器,同样将开关霍尔传感器1、4、7、10、13每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、7、10、13的数据合成后作为信号a输出,将开关霍尔传感器2、5、8、11、14的数据合成后作为信号b输出,将开关霍尔传感器3、6、9、12、15的数据合成后作为信号c输出;
36、当x=n时,表示缺n块磁铁,则需要n+1组开关霍尔传感器;即开关霍尔传感器1、4、……、3n+1每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与n/2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、……、3n+1的数据合成后作为信号a输出,开关霍尔传感器2、5、……、3n+2的数据合成后作为信号b输出,将开关霍尔传感器3、6、……、3n+3的数据合成后作为信号c输出;
37、⑤缺失snsx极磁铁且缺失的磁铁为相邻磁铁(表示在直线电机在运行过程中,依次缺s极、n极、s极,x为正整数,表示缺sns极磁铁重复的次数)
38、开关霍尔传感器为s型时:
39、当x=n时,表示缺n块磁铁,则需要n+1组开关霍尔传感器;即开关霍尔传感器1、4、……、3n+1每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与(n-1)/2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、……、3n+1的数据合成后作为信号a输出,开关霍尔传感器2、5、……、3n+2的数据合成后作为信号b输出,将开关霍尔传感器3、6、……、3n+3的数据合成后作为信号c输出;
40、开关霍尔传感器为n型:
41、当x=n时,表示缺n块磁铁,则需要n+1组开关霍尔传感器;即开关霍尔传感器1、4、……、3n+1每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与(n+1)/2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、……、3n+1的数据合成后作为信号a输出,开关霍尔传感器2、5、……、3n+2的数据合成后作为信号b输出,将开关霍尔传感器3、6、……、3n+3的数据合成后作为信号c输出;
42、⑥缺失nsnx极磁铁且缺失的磁铁为相邻磁铁(表示在直线电机在运行过程中,依次缺n极、s极、n极,x为正整数,表示缺nsn极磁铁重复的次数)
43、开关霍尔传感器为s型:
44、当x=n时,表示缺n块磁铁,则需要n+1组开关霍尔传感器;关霍尔传感器1、4、……、3n+1每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与(n+1)/2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、……、3n+1的数据合成后作为信号a输出,开关霍尔传感器2、5、……、3n+2的数据合成后作为信号b输出,将开关霍尔传感器3、6、……、3n+3的数据合成后作为信号c输出,信号处理芯片通过读取信号a、b、c的编码信息就能判断环形路径上直线电机初级和电机次级的相对位置;
45、开关霍尔传感器为n型时:
46、当x=n时,表示缺n块磁铁,则需要n+1组开关霍尔传感器;即开关霍尔传感器1、4、……、3n+1每个时序对应的高低电平值首尾相连,形成一个环形,对相邻数据进行相与(n-1)/2次,然后对所有数据进行或运算,最终将开关霍尔传感器1、4、……、3n+1的数据合成后作为信号a输出,开关霍尔传感器2、5、……、3n+2的数据合成后作为信号b输出,将开关霍尔传感器3、6、……、3n+3的数据合成后作为信号c输出,信号处理芯片通过读取信号a、b、c的编码信息就能判断环形路径上直线电机初级和电机次级的相对位置;
47、⑦缺失磁铁不连续
48、在这种情况下可以使用上述六种磁铁缺失方式组合实现;其中,数据合成采用与之前相同的方法,仅对缺失磁铁处前后至少需要连续磁铁的数量进行限制,设某一处缺失磁铁数为n,则在该缺口前后都要至少有n+2个连续的磁铁,使数据合成提供更多的有效数据。
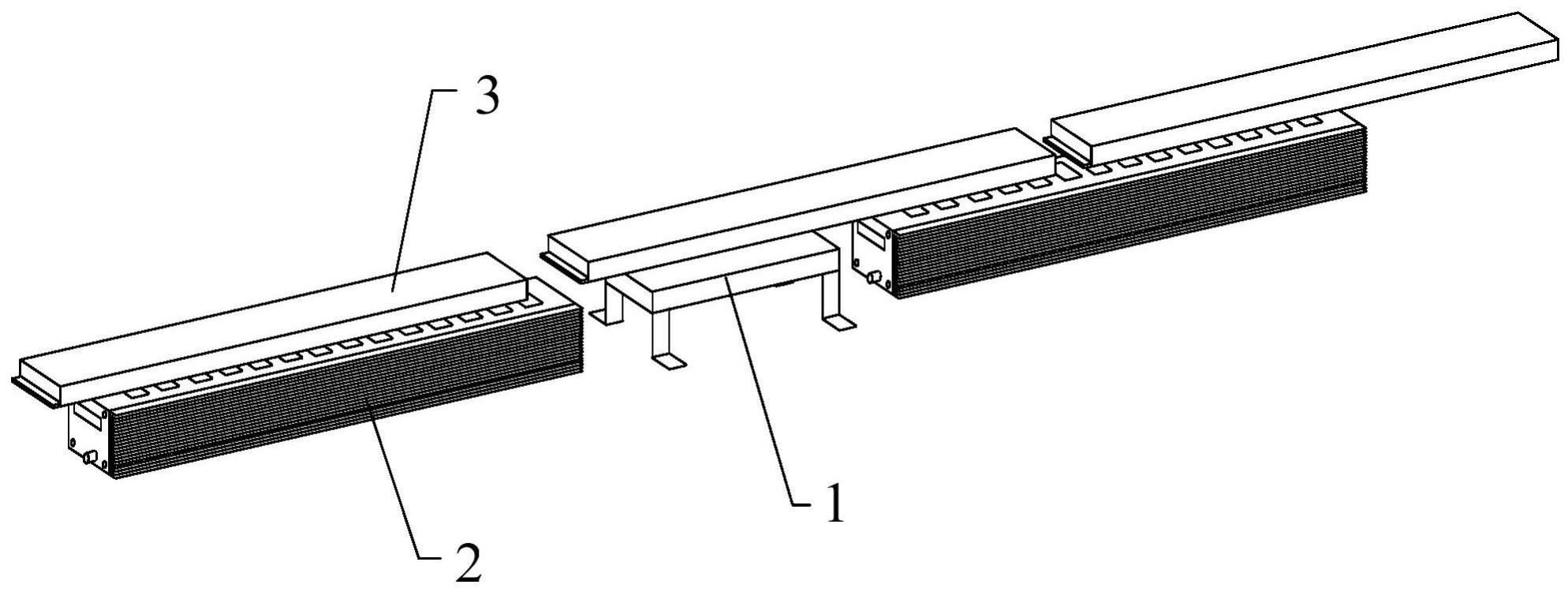
49、在一个示例中,所述直线编码器与电机初级间隔排列,所述电机次级架设在所述直线编码器与所述电机初级正上方。
50、在一个示例中,所述电机次级内间隔排列s极磁铁、n极磁铁,所述直线编码器内设置有开关霍尔传感器。
51、通过本发明提出的一种直线电机编码器在磁场缺失情况下的位置检测方法能够带来如下有益效果:
52、1.将开关霍尔编码器应用于环形路径的位置检测,依靠磁感应的霍尔元件,相较于光电开关,能够提高位置检测上的精度,相较于视觉定位系统,减少环形路径定位所需要的配套设备,能够节约成本;
53、2.在环形路劲转弯处缺少磁铁导致数据缺失的情况下,利用数据间的特定的运算方法,以及在对应磁铁缺失情况下配备对应数量的开关霍尔传感器来进行数据补偿,获得完整且正确的数据,解决了环形路径非直线段磁铁缺失带来的数据缺失问题。
- 还没有人留言评论。精彩留言会获得点赞!