机器人的安全充电方法、装置、设备、介质和程序与流程
本技术实施例涉及电子设备,尤其涉及一种机器人的安全充电方法、装置、设备、介质和程序。
背景技术:
1、机器人的发展十分迅速,其功能也在日益增加,部分机器人具有自主充电功能,在部署机器人时相应的会部署充电桩,机器人可以在电量较低或者空闲时自动与充电桩连接进行充电。
2、机器人充电过程中的安全问题是一个不可忽视的问题,机器人在充电过程中,可能会由于充电触片或者充电线路过热引起火灾。
技术实现思路
1、本技术实施例提供一种机器人的安全充电方法、装置、设备、介质和程序,能够避免由于机器人电池不健康、充电过程中充电线路过热和充电触片过热引发的充电安全问题,提高了机器人的充电安全性。
2、第一方面,本技术实施例提供一种机器人的安全充电方法,应用于充电桩,所述方法包括:
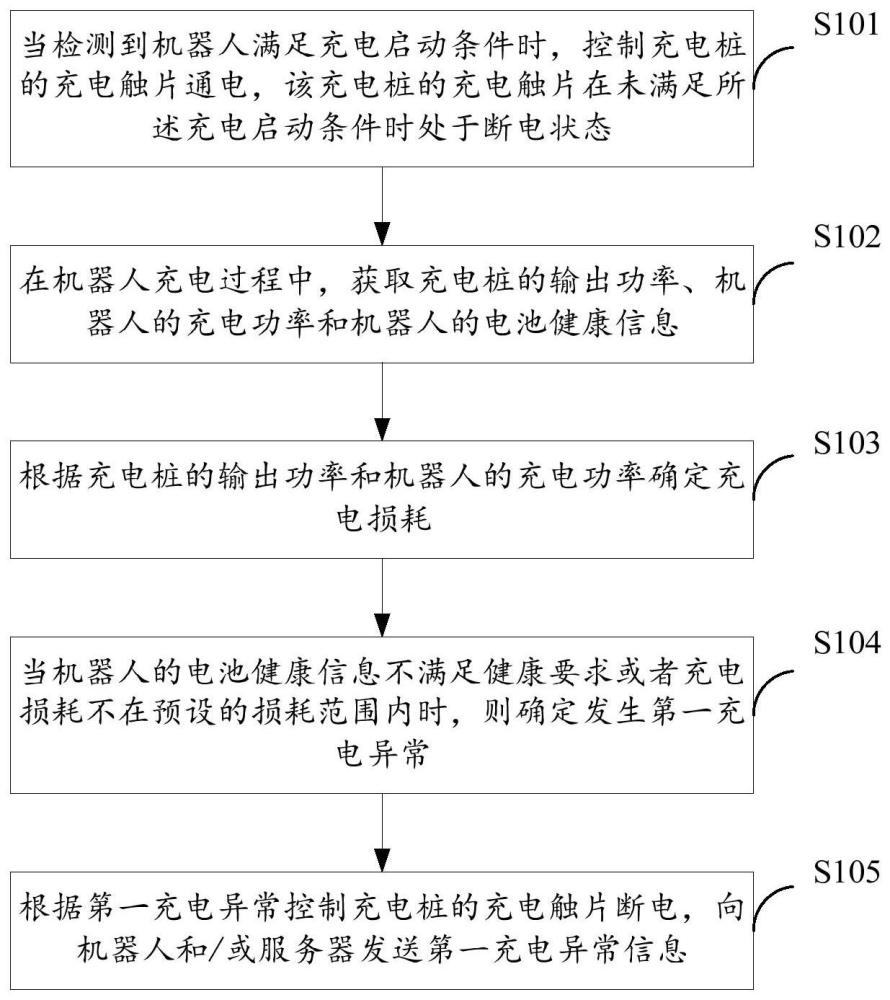
3、当检测到机器人满足充电启动条件时,控制所述充电桩的充电触片通电,所述充电桩的充电触片在未满足所述充电启动条件时处于断电状态;
4、在所述机器人充电过程中,获取所述充电桩的输出功率、所述机器人的充电功率和所述机器人的电池健康信息;
5、根据所述充电桩的输出功率和所述机器人的充电功率确定充电损耗;
6、当所述机器人的电池健康信息不满足健康要求或者所述充电损耗不在预设的损耗范围内时,则确定发生第一充电异常;
7、根据所述第一充电异常控制所述充电桩的充电触片断电,向所述机器人和/或服务器发送第一充电异常信息。
8、在一些实施例中,所述方法还包括:
9、当检测到所述充电桩的充电触片与所述机器人的充电触片完全接触时,检测所述机器人的输入电阻的阻值,其中,所述输入电阻为所述机器人的充电触片的正极和负极之间设置的一个电阻;
10、当所述输入电阻的阻值在预设的阻值范围内时,确定所述机器人满足充电启动条件。
11、在一些实施例中,所述方法还包括:
12、向所述机器人或者所述服务器发送所述充电桩的状态信息,所述充电桩的状态信息包括所述充电桩的输出电压和输出电流。
13、在一些实施例中,所述获取所述机器人的充电功率和所述机器人的电池健康信息,包括:
14、接收所述机器人发送的所述机器人的状态信息,所述机器人的状态信息中包括所述机器人的充电电压、充电电流和所述机器人的电池健康信息;
15、根据所述机器人的充电电压和充电电流计算所述机器人的充电功率。
16、在一些实施例中,所述根据所述充电桩的输出功率和所述机器人的充电功率确定充电损耗,包括:
17、计算所述充电桩的输出功率和所述机器人的充电功率的功率差值,确定所述功率差值为所述充电损耗;
18、或者,计算所述机器人的充电功率与所述充电桩的输出功率的功率比值,确定所述功率比值为所述充电损耗。
19、第二方面,本技术实施例提供一种机器人的安全充电方法,应用于机器人,所述方法包括:
20、在所述机器人使用充电桩充电过程中,获取所述充电桩的输出功率、所述机器人的充电功率和所述机器人的电池健康信息;
21、根据所述充电桩的输出功率和所述机器人的充电功率确定充电损耗;
22、当所述机器人的电池健康信息不满足健康要求或者充电损耗不在预设的损耗范围内时,则确定发生第二充电异常;
23、根据所述第二充电异常控制所述机器人移动,使得所述充电桩的充电触片与所述机器人的充电触片分离,向服务器发送第二充电异常信息。
24、在一些实施例中,所述方法还包括:
25、接收所述服务器发送的充电调度信息,所述充电调度信息中包括充电指令以及可用的所述充电桩的以下至少一个信息:充电桩的标识,充电桩的位置信息;
26、根据所述充电调度信息和预先获取的环境地图移动至所述充电桩的位置,控制所述机器人的充电触片与所述充电桩的充电触片接触。
27、在一些实施例中,所述方法还包括:
28、接收部署指令,根据部署指令开始构建所述机器人部署的物理环境的所述环境地图;
29、在构建所述环境地图的过程中,当检测到所述机器人与所述物理环境中充电桩连接充电时,将所述机器人当前所在的位置作为所述充电桩的位置,在所述环境地图中标记所述充电桩的位置;
30、在所述环境地图构建完成后,将所述环境地图发送给所述服务器,所述环境地图中包括所述物理环境内的各充电桩的位置信息。
31、在一些实施例中,所述方法还包括:
32、接收所述充电桩发送的状态信息,向所述服务器发送所述充电桩的状态信息,所述充电桩的状态信息包括所述充电桩的输出电压和输出电流;
33、和/或,向所述服务器发送所述机器人的状态信息,所述机器人的状态信息中包括所述机器人的充电电压、充电电流和所述机器人的电池健康信息。
34、在一些实施例中,所述根据所述充电桩的输出功率和所述机器人的充电功率确定充电损耗,包括:
35、计算所述充电桩的输出功率和所述机器人的充电功率的功率差值,确定所述功率差值为所述充电损耗;
36、或者,计算所述机器人的充电功率与所述充电桩的输出功率的功率比值,确定所述功率比值为所述充电损耗。
37、第三方面,本技术实施例提供一种机器人的安全充电方法,应用于服务器,所述方法包括:
38、接收机器人发送的第一充电异常信息,和/或,接收充电桩发送的第二充电异常信息,所述第一充电异常信息和第二充电异常信息用于指示所述机器人与所述充电桩之间发生充电异常;
39、根据所述第一充电异常信息和/或所述第二充电异常信息,向预设的告警用户发送告警信息。
40、在一些实施例中,所述方法还包括:
41、获取物理环境内部署的充电桩的占用信息和故障信息;
42、当确定所述机器人需要充电时,根据所述物理环境内部署的充电桩的占用信息和故障信息,从所述物理环境内部署的充电桩中确定可用的充电桩,所述可用的充电桩为没有被机器人占用且没有发生故障的充电桩;
43、向所述机器人发送充电调度信息,所述充电调度信息中包括充电指令以及可用的充电桩的以下至少一个信息:充电桩的标识,充电桩的位置信息。
44、在一些实施例中,所述方法还包括:
45、接收所述机器人的状态信息和所述充电桩的状态信息,所述机器人的状态信息包括所述机器人的充电电压、充电电流和所述机器人的电池健康信息,所述充电桩的状态信息包括所述充电桩的输出电压和输出电流。
46、第四方面,本技术实施例提供一种机器人的安全充电装置,所述装置包括:
47、控制模块,用于当检测到机器人满足充电启动条件时,控制充电桩的充电触片通电,所述充电桩的充电触片在未满足所述充电启动条件时处于断电状态;
48、获取模块,用于在所述机器人充电过程中,获取所述充电桩的输出功率、所述机器人的充电功率和所述机器人的电池健康信息;
49、损耗确定模块,用于根据所述充电桩的输出功率和所述机器人的充电功率确定充电损耗;
50、异常确定模块,用于当所述机器人的电池健康信息不满足健康要求或者所述充电损耗不在预设的损耗范围内时,则确定发生第一充电异常;
51、异常处理模块,用于根据所述第一充电异常控制所述充电桩的充电触片断电,向所述机器人和/或服务器发送第一充电异常信息。
52、第五方面,本技术实施例提供一种机器人的安全充电装置,所述装置包括:
53、获取模块,用于在所述机器人使用充电桩充电过程中,获取所述充电桩的输出功率、所述机器人的充电功率和所述机器人的电池健康信息;
54、损耗确定模块,用于根据所述充电桩的输出功率和所述机器人的充电功率确定充电损耗;
55、异常确定模块,用于当所述机器人的电池健康信息不满足健康要求或者充电损耗不在预设的损耗范围内时,则确定发生第二充电异常;
56、异常处理模块,用于根据所述第二充电异常控制所述机器人移动,使得所述充电桩的充电触片与所述机器人的充电触片分离,向服务器发送第二充电异常信息。
57、第六方面,本技术实施例提供一种机器人的安全充电装置,所述装置包括:
58、接收模块,用于接收机器人发送的第一充电异常信息,和/或,接收充电桩发送的第二充电异常信息,所述第一充电异常信息和第二充电异常信息用于指示所述机器人与所述充电桩之间发生充电异常;
59、告警模块,用于根据所述第一充电异常信息和/或所述第二充电异常信息,向预设的告警用户发送告警信息。
60、第七方面,本技术实施例提供一种电子设备,所述电子设备包括:处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序,以执行如上述第一方面至第三方面任一项所述的方法。
61、第八方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序使得计算机执行如上述第一方面至第三方面任一项所述的方法。
62、第九方面,本技术实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面至第三方面任一项所述的方法。
63、本技术实施例提供的机器人的安全充电方法、装置、设备、介质和程序,当充电桩检测到机器人满足充电启动条件时,控制充电桩的充电触片通电,充电桩的充电触片在未满足充电启动条件时处于断电状态,在机器人充电过程中,获取充电桩的输出功率、机器人的充电功率和机器人的电池健康信息;根据充电桩的输出功率和机器人的充电功率确定充电损耗,当机器人的电池健康信息不满足健康要求或者充电损耗不在预设的损耗范围内时,则确定发生第一充电异常,控制充电桩的充电触片断电,向机器人和/或服务器发送第一充电异常信息。从而能够避免由于机器人电池不健康、充电过程中充电线路过热和充电触片过热引发的充电安全问题,提高了机器人的充电安全性。
- 还没有人留言评论。精彩留言会获得点赞!