ADC静态参数测试方法及其在ADC测试中的应用与流程
adc静态参数测试方法及其在adc测试中的应用
技术领域
1.本发明涉及模数转换器技术领域,具体为一种adc静态参数测试方法及其在adc测试中的应用。
背景技术:
2.模数转换器(adc)是一种将模拟信号转换成数字信号的电子元件,在现代集成电路工业中占有重要地位。随着电子技术的不断发展以及adc精度要求的不断提高,对其进行准确的静态参数测试也面临着更大的挑战。测试高精度adc需要更高精度的仪器和更长的测试时间,不仅增加了adc芯片测试的成本,而且使芯片的整体成本变高。目前,用于表征adc性能的参数主要为静态参数、动态参数,在adc设计以及制造过程中,需对adc的静态参数、动态参数进行测试,以满足adc的高精度性能要求。
3.静态参数是描述adc输入为直流或低频信号时的性能指标,目前业界常用的静态参数测试方法包括:伺服回路法、码密度直方图法等。码密度直方图法的测试原理相对简单,该方法使用信号源向adc输入低频测试信号:斜坡信号或正弦信号,并采集adc的输出数据,通过概率密度函数计算每个码仓内的点数从而得到adc的dnl、inl等静态参数,然而,为降低adc测试误差,不利于内建自测试的实现。此外,对于内建自测试而言,有限的片上面积难以集成高精度的信号源,使adc输出的静态参数中掺杂较多的噪声,大大影响了adc的测试精度。
技术实现要素:
4.针对现有技术中存在的现有高精度adc输出数据中易掺杂较多噪声,影响了adc的测试精度的问题,本发明提供了一种adc静态参数测试方法,其可减少adc输出的静态参数中的噪声,可提升adc的测试精度。
5.为实现上述目的,本发明采用如下技术方案:
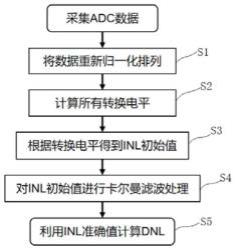
6.一种adc静态参数测试方法,处理前,采集adc的输出数据,其特征在于,该方法为:s1、对所述输出数据预处理,获得预处理数据,所述输出数据预处理包括归一化;
7.s2、基于所述预处理数据,计算获得实际转换电平;
8.s3、基于所述实际转换电平,计算所述输出数据中的静态参数inl的初始估计值;
9.s4、采用卡尔曼滤波模型对所述静态参数inl的初始估计值进行滤波,滤波指:基于所述静态参数inl的初始估计值,采用卡尔曼滤波模型对系统状态进行最优估计,获得所述静态参数inl的最优估计值;
10.s5、基于所述静态参数inl的最优估计值,计算所述输出数据中的静态参数dnl。
11.其进一步特征在于,
12.步骤s1中,对所述输出数据预处理指:首先对所述输出数据进行归一化处理,获得归一化数据,其次,对所述归一化数据按单调递增方式进行排序,排序后的数据即为所述预处理数据;
13.步骤s2中,所述实际转换电平t[k]的计算公式为:
[0014][0015]
其中,a表示正弦信号幅度,hc[k-1]表示前k-1个码仓内的采样点数和,m表示总采样点数,k=0,1,2,
……2n-2;
[0016]
步骤s3中,静态参数inl的初始估计值的计算公式为:
[0017][0018]
步骤s4中,滤波过程中,计算获得所述静态参数inl的最优估计值的公式包括:
[0019]
x
p
=f
·
x
[0020]sp
=f
·s·ft
+q
[0021]
k=s
p
·ht
/(h
·sp
·ht
+r)
[0022]
x=x
p
+k
·
(z(k)-h
·
x
p
)
[0023]
s=(1-k
·
h)
·sp
[0024]
inl(k)=x
[0025]
其中,z(k)表示静态参数inl的初始估计值,x为状态向量,s为状态协方差矩阵,初值设为零。h为量测矩阵,h
t
为量测矩阵的转置,f为系统转移矩阵,初值设为单位矩阵。q和r分别为系统噪声和量测噪声的协方差,初值设为0。k为卡尔曼增益,与状态向量x和协方差q、r在每次循环中更新,inl(k)为计算获得的静态参数inl的最优估计值;
[0026]
步骤s5中,所述静态参数dnl的计算公式为:
[0027]
dnl[k]=inl[k+1]-inl[k];
[0028]
inl[k+1]表示第k+1个采样点的静态参数inl的最优估计值,inl[k]表示第k个采样点的静态参数inl的最优估计值;
[0029]
将上述方法应用于高精度adc的测试,其特征在于,测试步骤包括:
[0030]
a1、采用码密度直方图法,在所述adc的输入端输入正弦信号;
[0031]
a2、采集adc的输出数据,平均每个码仓内采集64个点;
[0032]
a3、采用上述adc静态参数测试方法对所述输出数据进行处理,获得静态参数inl的最优估计值、静态参数dnl;
[0033]
a4、将所述静态参数inl的最优估计值、静态参数dnl分别与相应的实际静态参数inl、实际静态参数dnl进行对比,根据对比结果判断测量精度。
[0034]
其进一步特征在于,
[0035]
所述adc的精度为14位;
[0036]
步骤s4中,根据对比结果判断测量精度的方式为:所述静态参数inl的最优估计值与相应的实际静态参数inl的差值越小,并且所述静态参数dnl与实际静态参数dnl的差值越小,表明测量精度越高。
[0037]
采用本发明上述方法可以达到如下有益效果:本技术方法在静态参数处理过程中,首先计算了静态参数inl,再基于静态参数inl计算静态参数dnl,静态参数inl计算过程中采用了卡尔曼滤波模型对静态参数inl的初始估计值进行了滤波处理,将因信号源精度低而引入的噪声滤除,从而获得静态参数inl的最优估计值,基于该静态参数inl的最优估
计值计算获得的静态参数dnl为滤除噪声后的值,将该adc静态参数测试方法应用于adc测试中,有效避免了噪声对adc静态参数测量精度的影响,提升了高精度adc的测量精度。
附图说明
[0038]
图1为采用目前常用码密度直方图法中码宽计算方式获得的码宽与采样点数的关系曲线图;
[0039]
图2为采用目前常用码密度直方图法中码宽计算方式获得的码宽与采样点数不严格相等的放大的关系曲线图(即图1中局部a的放大图);
[0040]
图3为本发明adc静态参数处理的方法流程图;
[0041]
图4为本发明adc测试的方法流程图;
[0042]
图5为将本发明adc静态参数测试方法应用于adc测试中获得的静态参数dnl以及采用传统方法获得的静态参数dnl与实际静态参数dnl的仿真图;
[0043]
图6为将本发明adc静态参数测试方法应用于adc测试中获得的静态参数inl的最优估计值以及采用传统方法获得的静态参数inl与实际静态参数inl、的仿真图。
具体实施方式
[0044]
以下提供了不同的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
[0045]
目前常用的adc静态参数测试方法为码密度直方图法,其主要利用码密度函数得到各个码仓内的理想点数与实际点数比较,从而得到adc每个码仓的码宽、转换电平、静态参数dnl和静态参数inl等参数。传统方法中,码宽的获取采用了公式:
[0046][0047]
其中,h(k)表示实际采样点数,h
ideal(k)
表示理想采样点数,w(k)表示实际码宽,w
ideal(k)
表示理想码宽,将adc输出数据按大小排列后,可以得到如图1所示的曲线,图1中横轴表示采样点数,纵轴表示转化电平,t(i)表示第i个转换电平,h(i)表示第i个码仓,由于adc输入端输入的正弦信号是非线性信号,因此,上述公式中的实际采样点数与理想采样点数之比和实际码宽与理想码宽之比并不完全相等,而是近似,图1中局部a放大后的曲线图见图2,从图2中2a以及2b可以看出,传统方法中利用了相似三角形原理,实际采样点数与理想采样点数之比和实际码宽与理想码宽之比之间存在一定误差,该误差由正弦信号的非线性以及采样点求码宽过程中的计算误差引起,因此通过码宽计算出的静态参数dnl会带有一定误差,因此采用目前常用的静态参数dnl累加计算获得静态参数inl时,误差将会累积,导致最终获得的静态参数inl的误差增大。
[0048]
可见,目前常用的adc静态参数inl计算方法的误差主要来自于信号的非线性、adc
的量化误差等。另外,有限的片上面积难以集成高精度的信号源,使adc输出的静态参数中掺杂较多的噪声,也会引起最终获得的静态参数inl的误差增大。针对现有技术中存在的adc静态参数inl易受信号非线性、量化误差以及输出数据中掺杂噪声影响,导致最终获得的静态参数inl的误差增大的问题,以及目前常用高精度adc测试方法测试效率低,获得的adc静态参数误差较大,降低了adc的测试精度的问题,本发明提供了一种adc静态参数处理方法的具体实施例,并提供了其在adc测试中的具体应用。
[0049]
见图3,一种adc静态参数测试方法,处理前,采集adc的输出数据,该方法为:s1、对输出数据预处理,获得预处理数据。对输出数据预处理指:首先对输出数据进行归一化处理,获得归一化数据,其次,对归一化数据按单调递增方式进行排序,排序后的数据即为预处理数据,对输出数据进行预处理后,将采集的输出数据统一在0~1的单调区间内,转化为了单调信号,有利于后续计算,在计算静态参数inl的初始估计值、最优估计值前,对adc的输出数据进行了归一化预处理,将输出数据限定在0~1范围内,利于提升后续数据处理速度,从而提升测试效率。
[0050]
s2、基于预处理数据,计算获得实际转换电平。实际转换电平t[k]的计算公式为:
[0051][0052]
其中,a表示正弦信号幅度,hc[k-1]表示前k-1个码仓内的采样点数和,m表示总采样点数,k=0,1,2,
……2n-2。
[0053]
s3、基于实际转换电平,计算输出数据中的静态参数inl的初始估计值。静态参数inl的初始估计值的计算公式为:
[0054][0055]
s4、采用卡尔曼滤波模型对静态参数inl的初始估计值进行滤波,滤波指:基于静态参数inl的初始估计值,采用卡尔曼滤波模型对系统状态进行最优估计,获得静态参数inl的最优估计值。滤波过程中,计算获得静态参数inl的最优估计值的公式包括:
[0056]
x
p
=f
·
x
[0057]sp
=f
·s·ft
+o
[0058]
k=s
p
·ht
/(h
·sp
·ht
+r)
[0059]
x=x
p
+k
·
(z(k)-h
·
x
p
)
[0060]
s=(1-k
·
h)
·sp
[0061]
inl(k)=x
[0062]
其中,z(k)表示静态参数inl的初始估计值,x为状态向量,s为状态协方差矩阵,初值设为零。h为量测矩阵,h
t
为量测矩阵的转置,f为系统转移矩阵,初值设为单位矩阵。q和r分别为系统噪声和量测噪声的协方差,初值设为0。k为卡尔曼增益,与状态向量x和协方差q、r在每次循环中更新,inl(k)为计算获得的静态参数inl的最优估计值,通过卡尔曼增益的加权计算保证协方差始终最小。
[0063]
s5、基于静态参数inl的最优估计值,计算输出数据中的静态参数dnl。静态参数dnl的计算公式为:
[0064]
dnl[k]=inl[k+1]-inl[k];
[0065]
其中,inl[k+1]表示码仓内第k+1个采样点的静态参数inl的最优估计值,inl[k]表示第k个采样点的静态参数inl的最优估计值。
[0066]
本技术方法在静态参数处理过程中,首先计算了静态参数inl,再基于静态参数inl计算静态参数dnl,静态参数inl计算过程中采用了卡尔曼滤波模型对静态参数inl的初始估计值进行了滤波处理,将因信号源精度低而引入的噪声滤除,从而获得静态参数inl的最优估计值,基于该静态参数inl的最优估计值计算获得的静态参数dnl为滤除噪声后的值。
[0067]
见图4,将上述方法应用于高精度adc的测试,adc的精度为14位,测试步骤包括:
[0068]
a1、采用码密度直方图法,在adc的输入端输入正弦信号;
[0069]
a2、采集adc的输出数据,平均每个码仓内采集64个点;
[0070]
a3、采用上述adc静态参数测试方法对输出数据进行处理,获得静态参数inl的最优估计值、静态参数dnl;
[0071]
a4、将静态参数inl的最优估计值、静态参数dnl分别与相应的实际静态参数inl、实际静态参数dnl进行对比,根据对比结果判断测量精度,判断方式为:静态参数inl的最优估计值与相应的实际静态参数inl的差值越小,并且静态参数dnl与实际静态参数dnl的差值越小,表明测量精度越高。
[0072]
图5给出了本技术上述adc测试中获得的静态参数inl的最优估计值、静态参数dnl以及采用传统方法获得的静态参数inl、静态参数dnl与实际静态参数inl、静态参数dnl的仿真图,图5表示采用本技术方法获得的静态参数dnl、传统码密度直方图法获得的静态参数dnl与实际静态参数dnl的仿真效果图,图5中曲线a1表示传统码密度直方图法获得的静态参数dnl,曲线a2表示实际静态参数dnl,曲线a3表示采用本技术方法获得的静态参数dnl,该图5中,与曲线a2越接近,表明与实际静态参数dnl的值越接近,测量精度越高,从图5可以看出,采用本技术方法获得的曲线a3与曲线a2的距离较近,而曲线a1与曲线a2的距离较远,距离越近,测量精度越高,因此,采用本技术方法能够提高adc静态参数dnl的测量精度。同理,图6表示采用本技术方法获得的静态参数inl、传统码密度直方图法获得的静态参数inl与实际静态参数inl的仿真效果图,图6中曲线b1表示传统码密度直方图法获得的静态参数inl,曲线b2表示实际静态参数inl,曲线b3表示采用本技术方法获得的静态参数inl,该图6中,与曲线b2越接近,表明与实际静态参数inl的值越接近,测量精度越高,从图6可以看出,采用本技术方法获得的曲线b3与曲线b2的距离较近,而曲线b1与曲线b2的距离较远,因此,采用本技术方法能够提高adc静态参数inl的测量精度。
[0073]
以上的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1