一种仿生隐蔽水声通信探测一体化方法
本发明涉及水声通信和目标探测一体化,特别涉及一种仿生隐蔽水声通信探测一体化方法。
背景技术:
1、现代军事和民用平台需要同时实现通信和探测功能。按照传统方式进行分立式设计会增加系统的体积、功耗和成本,同时也会降低系统的兼容性能。采用通信探测一体化的设计方法可以让通信和探测模块共享硬件资源,从而解决上述问题。
2、为了防止用于军事目的水声通信信号在传输过程中被识别和破译,通信必须秘密进行。与传统的降低传输功率或增加调制带宽的方法不同,仿生隐蔽水声通信通过模仿鲸目动物的声音,诱导非通信合作方将鲸目动物的声音与仿生通信信号混淆,从而排除接收到的信号,实现隐蔽效果。由于仿生通信信号不需要降低传输能量,因此,仿生隐蔽水声通信可以获得比现有的隐蔽水下通信方法更好的传输距离和误码率性能。而主动声呐为了探测水下噪声环境中的远程目标,需要发射高功率探测信号以获得所需的信噪比。因此,主动声呐也具有安全性和隐蔽性需求。综合考虑水声通信隐蔽性和水声探测隐蔽性,对于水下作战平台等应用场景具有十分重要的意义。
3、目前已有的仿生隐蔽通信方法,如:申请号为202110111520.x的中国发明专利申请,公开了一种基于分段时频轮廓时延调制的仿鲸目哨声通信方法,该方法对哨声信号进行分段调制,局限在于调制后生成的仿生哨声信号时频轮廓产生不连续性,影响了仿生伪装性能。目前已有的水下通信探测一体化方法,如:申请号为201910909461.3的中国发明专利申请,公开了一种水下通信探测一体化方法,该方法将通信信息调制在相邻的pattern码之间的时延差值中,选用广义正弦调频信号作为pattern码,实现通信的同时,可以估计目标距离和速度,但是没有考虑对目标方位的估计。
4、综上可知,目前公开的专利中还没有关于仿生隐蔽水声通信探测一体化的方法。在仿生水声隐蔽通信方法中,需要考虑通信速率和隐蔽性的矛盾问题,使之既能提高通信速率,又不影响隐蔽性。在水下通信探测一体化方法中,需要提高对目标位置的估计准确度。
技术实现思路
1、本发明针对水声通信与目标主动探测皆存在隐蔽性问题,设计了一种仿生隐蔽水声通信与目标探测一体化方法,实现较高速率的水声通信,以及目标探测。
2、本发明方法具体是:
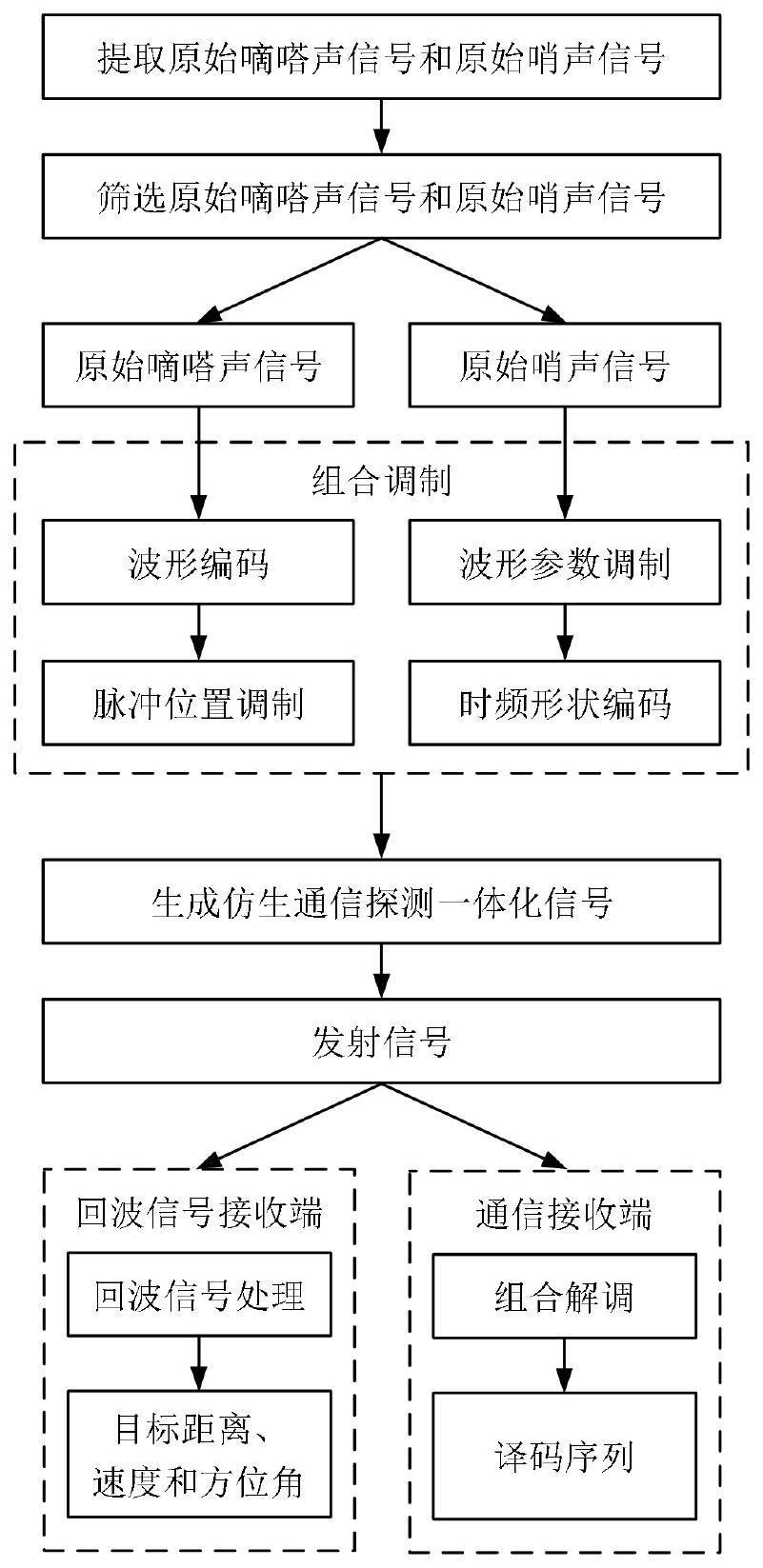
3、步骤(1)提取原始叫声信号:采用频带方差端点检测方法,提取原始嘀嗒声信号;采用双门限端点检测方法,提取原始哨声信号。
4、步骤(2)根据功率与相关性,筛选原始嘀嗒声信号和哨声信号:保留大于设定功率阈值,且大于自相关阈值、小于互相关阈值的原始嘀嗒声信号和原始哨声信号。
5、步骤(3)对筛选出的原始嘀嗒声信号和哨声信号进行组合信息编码和调制,具体如下:
6、(3-1)对筛选出的原始嘀嗒声信号进行波形编码,将2n1个嘀嗒声与2n1组n1位二进制比特信息构成编码映射关系,即每个原始嘀嗒声信号携带n1位比特信息,完成n1位比特信息的携带;
7、(3-2)对筛选出的原始嘀嗒声信号进行脉冲位置调制,将调制信息调制在相邻原始嘀嗒声信号之间的脉冲时间差,将调制信息q与2n2组n2位二进制比特信息构成编码映射关系,完成n2位比特信息的携带;其中,第i个和第i+1个原始嘀嗒声之间的时间差调制信息q=1,2,…,2n2,tc为每个嘀嗒声组合中相邻嘀嗒声之间的最大时间间隔,即调制时长,tc占据2n2个最小时间差,即调制间隔共有2n2种可能的脉冲时间差。
8、(3-3)以筛选出的原始哨声信号为原型,构建仿生哨声信号,对仿生哨声信号进行波形参数调制:利用筛选出的原始哨声信号的时域包络,对单频信号和线性调频信号的包络进行调制,再进行波形参数调制,生成仿生哨声已调信号,表示为al(t)表示原始哨声信号中t时刻第l个谐波的时域包络,l=1,2,…,l,l为谐波个数,fc为原始哨声信号的中心频率,调频率δb为带宽的调制间隔,为持续时间的调制间隔,k=0表示对单频信号进行调制,k≠0表示对线性调频信号进行调制,b和d为仿生哨声已调信号携带的调制信息,b和d的组合方案与2n3组n3位二进制比特信息构成编码映射关系,完成n3位比特信息的携带。
9、(3-4)对仿生哨声已调信号的时频形状进行编码,时频形状与2n4组n4位二进制比特信息构成编码映射关系,完成n4位比特信息的携带。
10、步骤(4)生成仿生通信探测一体化信号,由原始嘀嗒声的同步信号、嘀嗒声探测信号、嘀嗒声已调信号、仿生哨声探测信号、仿生哨声已调信号组成;其中,同步信号用于信号的帧同步,嘀嗒声探测信号和仿生哨声探测信号用于目标探测,嘀嗒声已调信号和仿生哨声已调信号用于进行通信。
11、步骤(5)主动目标探测:目标探测的接收端接收到通信探测一体化信号,采用时延测距法处理嘀嗒声探测信号,得到目标距离的估计;采用多普勒测速法和阵列测向法处理仿生哨声探测信号,分别得到目标速度和方位角信息的估计。具体如下:
12、(5-1)利用模糊度函数,估计发送信号与接收回波信号间的传播时间差,进行目标距离的估计:模糊度函数χ(τ,κ)是发送仿生通信探测一体化信号中的嘀嗒声探测信号u(t)及其回波信号u(κ(t-τ))的相关性函数,其中,κ为多普勒因子,τ为嘀嗒声探测信号模糊度函数峰值对应的时延,上标*表示共轭;被探测目标与回波信号接收端之间的距离估计值c为水下等效声速。
13、(5-2)采用分数阶傅里叶变换,估计多普勒因子,进行目标运动速度的估计。
14、对仿生哨声探测信号进行分数阶傅里叶变换,在最优阶傅里叶域,仿生哨声探测信号的能量得到聚集,产生峰值。此时,最优阶傅里叶域与时间轴的夹角为最佳旋转角
15、利用分数阶傅里叶变换最佳旋转角与仿生哨声已调信号调频率k之间的关系得到回波信号的调频率的估计值其中,时间分辨率频率分辨率n为采样点数,fs为采样频率。
16、利用多普勒因子与调频率之间的关系,得到多普勒因子估计值进而得到目标移动速度的估计值
17、(5-3)采用m元均匀分布线列阵,进行目标方位角的估计,具体是:
18、阵列输出信号其中,vp(t)是t时刻第p个仿生通信探测一体化信号中的哨声探测回波信号,p=1,2,…,p,p是哨声探测回波信号的个数;d是阵元间距,θp是第p个仿生通信探测一体化信号中的哨声探测回波信号相对于阵列的入射方位角,nm(t)表示第m个阵元上的噪声,m=1,2,…,m,m为阵列中阵元的个数,阵列输出协方差矩阵b=e[x(t)xh(t)],e[·]表示求均值运算,上标h表示转置共轭;
19、对每个阵元采用非相干信号子空间法进行目标方位角的估计:将宽带信号的频带划分成j个子带,对中心频率为fj的子带协方差矩阵b(fj)进行特征分解,b(fj)=u(fj)λ(fj)u(fj)h,j=1,2,…,j;其中,特征向量u(fj)=[us(fj)un(fj)],特征值us(fj)为信号特征向量,un(fj)为噪声特征向量,λs(fj)为信号特征值,λn(fj)为噪声特征值;
20、当方向向量a(fj,θ)与信号子空间的欧氏距离最小时,在方位角θ处得到一个高的谱峰;利用每个子带的空间谱得到宽带的空间谱对宽带空间谱进行角度扫描,找到空间谱的峰值位置,峰值对应的信号入射角度为目标方位角的估计值
21、步骤(6)通信的接收端接收到通信探测一体化信号,进行仿生已调信号的组合解调和译码:
22、发射机和接收机共享叫声信号数据库,第i′个接收仿生已调信号ri′(t)与叫声信号数据库中的第j′个本地信号cj′(t)的互相关函数表示为τ′为相关峰值对应的时延;利用相关峰值所对应的本地信号的编号j′,与二进制序列进行逆映射,得到译码序列。具体如下:
23、(6-1)利用嘀嗒声已调信号与嘀嗒声本地信号计算的2n1个互相关函数值,得到相关峰值所在的位置,进行嘀嗒声本地信号编号的估计。利用嘀嗒声本地信号编号与二进制序列的逆映射,进行n1位比特信息的译码。
24、(6-2)利用相邻的第x个和第x′=x+1个嘀嗒声已调信号相关峰值所在的位置tx和tx′,以及对应的已调信号的脉宽tx和tx′,得到两个嘀嗒声已调信号之间的时延差利用脉冲位置表达式得到q值,利用q和二进制序列的逆映射,进行n2位比特信息的解调。
25、(6-3)采用短时傅里叶变换,进行时频形状分析,确定时频形状对应的哨声本地信号;利用时频形状与二进制序列的逆映射,进行仿生哨声已调信号n4位比特信息的译码。
26、(6-4)利用(6-3)确定的哨声本地信号和仿生哨声已调信号计算的2n3个互相关函数值,进行哨声本地信号编号的估计;利用哨声本地信号编号与二进制序列的逆映射,进行n3位调制信息的解调。
27、本发明具有以下有益效果:
28、(1)本发明考虑了整体的原始哨声信号结构特点,而不是对哨声信号进行时域上的简单分割,一方面能让调制后的哨声信号携带更大的能量,降低通信的误码率,另一方面也是为了提高仿生性,不对哨声信号做分段处理,可以使信号的时频轮廓更平滑和连续。
29、(2)本发明考虑当前仿生隐蔽通信方法存在通信速率较低的问题,充分利用原始叫声信号的信号结构,即嘀嗒声和哨声的前后组合模式。分别对原始嘀嗒声信号和仿生哨声信号进行组合调制。提高了通信速率,并且使用原始嘀嗒声信号能进一步提高通信信号的隐蔽性。
30、(3)本发明基于叫声信号的良好探测性能,考虑主动声呐的隐蔽性问题,在仿生隐蔽水声通信方法设计的信号基础上,提出了一种仿生隐蔽水声通信探测一体化方法。采用原始嘀嗒声信号为距离探测信号,仿生哨声已调信号为速度和方位角探测信号。实现对目标距离、速度和方位角的准确估计,且能够保持仿生通信方法的通信性能。
- 还没有人留言评论。精彩留言会获得点赞!